

3.4 Обработка результатов расчетов
По результатам компьютерных расчетов построены графики F30(SB), F21(1), F23(1) и годограф реакции F10(F10)
Масштабные коэффициенты и ординаты графиков для положения 11:
 18
Н/мм
18
Н/мм 
 113
Н/мм
113
Н/мм


 113
Н/мм
113
Н/мм

 50
Н/мм
50
Н/мм

Значения ординат для всех остальных положений приведены в таблице 3:
Таблица 3
|
№ положения |
yF30, мм |
yF21, мм |
yF23, мм |
rF10, мм |
|
1 |
55 |
22 |
17 |
52 |
|
2 |
44 |
19 |
14 |
43 |
|
3 |
52 |
9 |
6 |
20 |
|
4 |
75 |
5 |
5 |
9 |
|
5 |
90 |
13 |
10 |
28 |
|
6 |
88 |
16 |
12 |
35 |
|
7 |
79 |
16 |
12 |
36 |
|
8 |
80 |
88 |
84 |
199 |
|
9 |
24 |
100 |
97 |
226 |
|
10 |
2 |
94 |
90 |
210 |
|
11 |
19 |
83 |
84 |
186 |
|
12 |
66 |
13 |
16 |
30 |
|
13 |
55 |
22 |
17 |
52 |
Уравновешивающий
момент Мур
является постоянным для всех положений
совпадающий со значением приведенного
момента движущих сил

Сопоставление результатов расчетов для положения 11:
|
Параметр |
Единица измерения |
Графический метод |
Аналитический метод |
|
VB |
м/c |
1,18 |
1,18 |
|
VS2 |
м/c |
1,2 |
1,19 |
|
2 |
рад/c |
1,12 |
1,11 |
|
ав |
м/c2 |
5,4 |
5,5 |
|
as2 |
м/c2 |
10,1 |
10,1 |
|
2 |
рад/c2 |
27,2 |
-27,1 |
|
F10 |
Н |
9310 |
9305 |
|
F21 |
Н |
9240 |
9275 |
|
F23 |
Н |
9450 |
9419 |
|
F30 |
Н |
350 |
342 |
|
Mу |
Н*м |
289 |
292,6 |
Идентификаторы:
F1 – φ1
W2 - 2
VB - vB
VS - vS
E2 – ε2
AB - aB
AS – aS2
FM – Mu2
F2X – Fu2X
F2Y – (Fu2Y –G2)
FI3 – Fu3
FM1 – Mu1
FMU - Mур
F21 – F21
F23 – F23
F10 – F10
B10 – φF10
F30 – F30
3.13 Выводы
Из анализа результатов проведенного исследования установлено:
1.Реакции F10, F21 и F23 имеют максимальные значения в положении 9.
2.Реакция F30 имеет максимальное значение в положении 5.
3. В течение всего
цикла установившегося движения
уравновешивающий момент имеет постоянную
величину Му=293
Н*м, совпадающий со значением приведенного
момента движущих сил
 ,
полученным при исследовании динамики
машины (раздел 2)
,
полученным при исследовании динамики
машины (раздел 2)
4 Проектирование кулачкового механизма
4.1 Задачи проектирования
Задачами проектирования кулачкового механизма являются:
1.Определение основных размеров из условия ограничения угла давления.
2.Определение профиля кулачка обеспечивающий заданный закон движения толкателя.
4.2 Определение кинематических характеристик
Ход толкателя h= 0,07 м
Фазовые углы поворота кулачка:

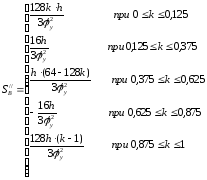
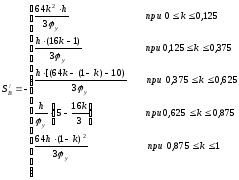
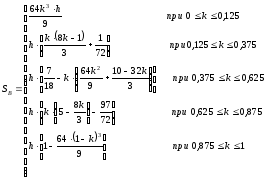
Аналог ускорения S′′, аналог скорости S′ и перемещение S толкателя определяются следующим образом:
На фазе удаления: закон линейного изменения ускорения


где
 -позиционный коэффициент (0 ≤k
≤ 1)
-позиционный коэффициент (0 ≤k
≤ 1)
На фазе возвращения: трапецеидальный закон изменения ускорения
Расчеты для положений 8 и 21:
Положение 8 ( фаза удаления):



Положение 21 (фаза возвращения):




Максимальные значения:

Определение основных размеров (аналитический метод)
Исходя из условия ограничения угла давления профиля кулачка, основные размеры механизма определяются следующим образом:
Смещение
толкателя:
Минимальный радиус-вектор центрового профиля кулачка:

В этих формулах k=1, если кулачок вращается против часовой стрелки, и k=-1, если по часовой.
SA
и SB-
перемещение толкателя при
 и
и .
.




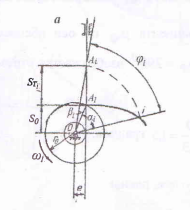
4.4 Определение полярных координат профиля кулачка
Полярные координаты
( )
точек центрового профиля кулачка,
обеспечивающего заданный закон движения
толкателя
)
точек центрового профиля кулачка,
обеспечивающего заданный закон движения
толкателя ,
определяется следующим образом:
,
определяется следующим образом:
 Рис
14
Рис
14
Радиус-вектор
профиля
Полярный угол

Положение 8:



Положение 21:



4.5 Определение угла давления
Угол
давления в любом положении механизма
определяется по формуле
 , гдеk=
, гдеk= (в зависимости от
направления вращения кулачка).
(в зависимости от
направления вращения кулачка).
Положение 8:

Положение 21:

4.6 Исходные данные для компьютерных расчетов
Тип механизма - №1
Вид синтеза - динамический
Направление вращения кулачка – против часовой стрелки
Замыкание высшей пары – кинематическое
Смещение толкателя – не задано
Ход толкателя h=0,07 м.
Фазовые углы поворота кулачка:
угол удаления φу=900
угол дальнего стояния φдс=270
угол возвращения φв=900
Максимально допустимый угол давления в кулачковом механизме θmax=300.
Законы движения толкателя:
при удалении: закон линейно изменяющегося ускорения
при возвращении: трапецеидальный закон изменения ускорения
Расчёт жёсткости пружины: не выполняется.