

2.7 Определение приведенных моментов сил сопротивления и движущих сил
Приведенный момент
сил сопротивления
 определяется из равенства мощностей,
согласно которому мощность момента
определяется из равенства мощностей,
согласно которому мощность момента равна сумме мощностей от силы полезного
сопротивленияF3
и сил тяжести звеньев:
равна сумме мощностей от силы полезного
сопротивленияF3
и сил тяжести звеньев:
 ,откуда
,откуда
 ,где
sign(1)=1,
т.к. механизм вращается против часовой
стрелки.
,где
sign(1)=1,
т.к. механизм вращается против часовой
стрелки.

Приведенный момент
движущихся сил
 принимается постоянным и определяется
из условия, что за цикл установившегося
движения машины изменение кинетической
энергии равно нулю.
принимается постоянным и определяется
из условия, что за цикл установившегося
движения машины изменение кинетической
энергии равно нулю.

Работа сил сопротивления

Интегрирование выполняется численным методом по способу трапеций:
 -шаг
интегрирования.
-шаг
интегрирования.
Т.к. работа за цикл
 ,
следовательно
,
следовательно

2.8 Определение переменной составляющей приведенного момента инерции и его производной
Переменная
составляющая момента инерции
 определяется
из равенства кинетических энергий,
согласно которому кинетическая энергия
звена приведения с моментом инерции
определяется
из равенства кинетических энергий,
согласно которому кинетическая энергия
звена приведения с моментом инерции равна сумме кинетических энергий звеньев
2 и 3:
равна сумме кинетических энергий звеньев
2 и 3:
 ,
откуда
,
откуда

Производная

Для положения 11


2.9 Определение постоянной составляющей приведенного момента инерциии момента инерции маховика
В
основу расчета положен метод Н.И.
Мерцалова. Для определения изменения
кинетической энергии машины
 предварительно определяем работу
движущихся силАД.
Для i-го
положения
предварительно определяем работу
движущихся силАД.
Для i-го
положения
 ,
где
,
где
Тогда
 .
.
Изменение
кинетической энергии
 звеньев с постоянным приведенным
моментом инерции
звеньев с постоянным приведенным
моментом инерции равно
равно
 ,
,
где
 - кинетическая энергия звеньев, создающих
переменную составляющую
- кинетическая энергия звеньев, создающих
переменную составляющую .
По методу Н.И. Мерцалова,
.
По методу Н.И. Мерцалова, определяется
приближенно по средней угловой скорости
определяется
приближенно по средней угловой скорости :
:

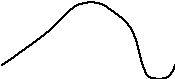
Далее
из полученного за цикл массива значений
 (рис.
10) находим максимальную
(рис.
10) находим максимальную и минимальную
и минимальную величины, используя которые, вычисляем
максимальный перепад кинетической
энергии:
величины, используя которые, вычисляем
максимальный перепад кинетической
энергии:


ТIa

i

ТIi

T

TI, TI
T
a
b

ТIb


1 цикл

ТIср
φ1(для TI)
φ1(для TI)

ТIср




О
О

Рис. 10
Тогда
необходимая величина
 ,
при которой имеет место вращение звена
приведения с заданным коэффициентом
неравномерностиδ,
равна:
,
при которой имеет место вращение звена
приведения с заданным коэффициентом
неравномерностиδ,
равна:
Момент инерции маховика определяется как
 ,
,
где
 - приведенный момент инерции всех
вращающихся масс машины (ротора двигателя,
зубчатых колес, кривошипа).
- приведенный момент инерции всех
вращающихся масс машины (ротора двигателя,
зубчатых колес, кривошипа).
2.10 Определение закона движения звена приведения
С
помощью зависимости
 ,
используемой при определении постоянной
составляющей приведенного момента
инерции
,
используемой при определении постоянной
составляющей приведенного момента
инерции по методу Мерцалова, можно получить
зависимость угловой скорости звена
приведения1(φ1).
по методу Мерцалова, можно получить
зависимость угловой скорости звена
приведения1(φ1).
Из
рис.10 видно, что для любого положения
кинетическая энергия звеньев, обладающих
постоянным моментом инерции
 ,
равна
,
равна
 ,
,
где
 .
.
Так
как
 ,то текущее значение
угловой скорости
,то текущее значение
угловой скорости
 .
.
Угловое ускорение ε1 определяется из дифференциального уравнения движения звена приведения:
 .
.
2.11 Схема алгоритма программы динамического синтеза и анализа машины
Начало
Исходные данные

АД1=0
i=1,n
Кинематические характеристики

i>1
нет
АСi







i=1,n
AДi ,Ti ,TIi


да

A
A
TIa,TIb
Поиск максимального и минимального элементов

i=1,n
TIi,1i,ε1i



Печать
результатов
Конец
Рис. 11
2.12 Исходные данные для выполнения расчетов на ПЭВМ
Схема механизма №1
Длина кривошипа l1=0,1101 м
Длина шатуна l2=0,4626 м
Смещение направляющих ползуна e=0,0560 м
Координата центра масс шатуна lAS2=0,1619 м
Начальная обобщенная координата φ0=354,353O
Направление вращения кривошипа: против часовой стрелки
Масса шатуна m2=37кг
Масса ползуна m3=111кг
Момент
инерции шатуна относительно оси,
проходящей через центр масс IS2=1,346
Силы полезного сопротивления
|
№ пол. |
F3,Н |
|
1 |
0 |
|
2 |
0 |
|
3 |
0 |
|
4 |
0 |
|
5 |
0 |
|
6 |
0 |
|
7 |
0 |
|
8 |
-8300 |
|
9 |
-10000 |
|
10 |
-10000 |
|
11 |
-10000 |
|
12 |
-3300 |
|
13 |
0 |
Средняя угловая скорость ср=11,5рад/с
Коэффициент неравномерности вращения кривошипа δ=0.05
Приведенный
момент инерции всех вращающихся звеньев
 =3,82
=3,82