

Ходовачастинаавтомобілів і тракторів. Різновиди, будова та робота
Ходовачастинаскладається з рами, переднього та задньогомостів (осей), підвіски і коліс з пневматичними шинами. Рама є основою для кріпленнявсіхмеханізмівавтомобілів, а також кузова абокабіни і вантажноїплатформи у вантажнихавтомобілів. У легковихавтомобілях і автобусах широко застосовуютьсябезрамніконструкції, в якихвсімеханізмиприкріплені до корпусу суцільнометалевогонесучого кузова. Мости автомобілівпередаютьвертикальненавантаженнявід рами або кузова на колеса, а штовхаючі і гальмовізусилля — відколісдо рами або кузова. Передніймістскладається з балки і шарнірноз'єднаних з нею поворотнихцапф, за допомогоюякихавтомобільробить поворот. Заднійміствиготовляютьзвичайнопустотілим. У ньомурозміщеначастинамеханізмівсиловоїпередачі. Підвіскапружноз'єднує мости з рамою і разом із шинами пом'якшуєпоштовхи та удари, щовиникаютьпід час рухуавтомобілів.
Як пружнийелементпідвіскизастосовуютьресори (пружні балки, складені з окремихсталевихлистів) абовитіпружини; використовуютьтакожстержньову (торсійну), гумову, пневматичну і пневмогідравлічнупідвіски. Для передніхколіслегковихавтомобілів широко застосовують так звану «незалежнупідвіску» , в якійпружнийелементз'єднує раму або кузов безпосередньо з колесом. Для гасінняколиваньпідвіски в усіхлегкових та у деякихвантажнихавтомобіляхвстановлюютьгідравлічніабомеханічні (фрикційні) амортизатори.
Для покращенняманевровості колеса транспортнихзасобіввстановлюються з певними кутами розвалу та сходження. Для контролю та регулюванняцихпараметрівзастосовуютьсяспеціальні (лазерніабокомп'ютерні) стенди «розвал-сходження».
Крім того, колеса транспортнихзасобівпідлягаютьперіодичномубалансуванню на спеціальнихбалансувальнихверстатах.
Ходава частина трактора: остов трактора, колісний рушій.
Загальні відомості
Ходова частина призначена для перетворення крутного моменту, створеного двигуном і збільшеного механізмами силової передачі, в зусилля, яке дає можливість здійснювати поступальний рух трактора. Крім того, ходова частина сприймає вагу трактора і забезпечує:
необхідне для пересування трактора зчеплення з дорожнім покриттям або ґрунтом;
найменший питомий тиск на дорожнє покриття або ґрунт;
найменші витрати потужності на переміщення та буксування.
Трактори мають гусеничні, колісні і напівгусеничні ходові частини.
Ходова частина колісного трактора складається з остова, ведучих і напрямних коліс, переднього моста та підвіски остова, гусеничного – із остова, гусеничних рушіїв та підвіски.
Призначення, різновиди, будова та принцип роботирульовогокеруванняавтомобілів
Рульовекеруванняпризначається для змінинапрямурухуавтомобіляповертаннямпередніхкерованихколіс і складається з рульовогомеханізму та рульового привода. На вантажнихавтомобіляхвеликоївантажопідйомності в рульовомукеруваннізастосовуютьпідсилювач, якийполегшуєкеруванняавтомобілем, зменшуєпоштовхи на рульове колесо й підвищуєбезпекуруху.
Рульовиймеханізмперетворюєобертаннярульового колеса на поступальнепереміщення тяг привода, щоповертаєкеровані колеса. При цьомузусилля, щопередаєтьсяводіємвідрульового колеса до коліс, якіповертаються, зростає в багаторазів.
Рульовий привод разом ізрульовиммеханізмомпередаєкеруючезусиллявідводіябезпосередньо до коліс і забезпечуєцим поворот керованихколіс на заданий кут.
Один ізповоротнихважелів, найчастішелівий 4, зв'язанийізрульовиммеханізмом через поздовжню тягу 6. Отже, коли приводиться в діюрульовиймеханізм, поздовжня тяга, переміщуючисьупередабо назад, спричинюєповертанняобохколіс на різні кути відповідно до схеми повороту.
Розташування й взаємодію деталей рульовогокерування, що не маєпідсилювача, можнарозглянути на схемі рис. 2, а. Тут рульовий механізм складається з рульового колеса 3, рульового вала 2 та рульової передачі 1, утвореної зачепленням черв'ячної шестірні (черв'яка) із зубчастим стопором, на вал якого кріпиться сошка 9 рульового привода. Сошка та решта деталей рульовогокерування — поздовжня тяга 8, верхнійважіль 7 лівоїповоротноїцапфи, нижніважелі 5 лівої та правоїповоротних цапф, поперечна тяга 6 — становлятьрульовий привод.
Керовані колеса повертаються, коли обертаєтьсярульове колесо 3, яке через вал 2 передаєобертаннярульовійпередачі 7. При цьомучерв'якпередачі, щоперебуває в зачепленні з сектором, починаєпереміщувати сектор угоруабо вниз по своїйнарізці. Вал сектора починаєобертатися й відхиляє сошку 9, яку верхнімкінцемнасаджено на ту частину вала сектора, щовиступає.Відхилення сошки передаєтьсяпоздовжнійтязі 8, щопереміщуєтьсявздовжсвоєїосі. Поздовжня тяга 8 зв'язана через верхнійважіль 7 із поворотною цапфою 4, тому їїпереміщенняспричинюєповертаннялівоїповоротноїцапфи. Віднеїзусилляповертання через нижніважелі 5 і поперечну тягу 6 передаєтьсяправійцапфі. Таким чином обидва колеса повертаються.
Керовані колеса повертаютьсярульовимкеруванням на обмежений кут, щодорівнює 28 .35°. Обмеження вводиться для того, щобпід час повертаннявиключитизачіпання колесами деталей підвіскиабо кузова автомобіля.
Конструкціярульовогокеруваннявизначається типом підвіскикерованихколіс: коли підвіскапередніхколісзалежна, в принципізберігається схема рульовогокерування, наведена на рис. 2, а; в разінезалежноїпідвіски (рис. 2, б) рульовий привод дещоускладнюється.
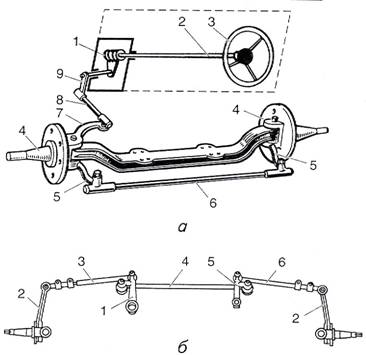
Рис. 2
Схемирульовогокерування:
а — залежнапідвіска (1 — рульова передача; 2 — рульовий вал; 3 — рульове колесо; 4 — поворотна цапфа; 5 — нижніважелілівої та правоїповоротних цапф; 6 — поперечна тяга; 7 — верхнійважільлівоїповоротноїцапфи;
8 — поздовжня тяга; 9 — сошка рульового привода); б — незалежнапідвіска
(1 — сошка; 2 — поворотніважелі; 3, 6 — відповідноліва й права бічні тяги;
4 — основна поперечна тяга; 5 — маятниковийважіль)
Рульовиймеханізмзабезпечуєповертаннякерованихколіс з невеликимзусиллям на рульовомуколесі. Цьогоможнадосягтизбільшенням передаточного числа рульовогомеханізму. Однакпередаточне число обмежене частотою обертаннярульового колеса. Якщовибратипередаточне число з кількістюобертіврульового колеса понад 2-3, то істотнозбільшується час, потрібний на повертанняавтомобіля, а це недопустимо за умовамируху. Тому передаточне число в рульовихмеханізмахберуть у межах 20-30, а для зменшеннязусилля на рульовомуколесі в рульовиймеханізмабо привод умонтовуютьпідсилювач.
Обмеження передаточного числа рульовогомеханізмупов'язанетакожізвластивістюоборотності, тобтоздатністюпередаватизворотнеобертання через механізм на рульове колесо. В разі великих передаточних чисел збільшуєтьсятертя в зачепленняхмеханізму, властивістьоборотностізникає, й самоповертаннякерованихколіспісляповернення в прямолінійнеположеннявиявляєтьсянеможливим.
Рульовімеханізмизалежновід типу рульової передач і бувають: • черв'ячні; • гвинтові; • шестеренчасті.
У черв'ячномурульовомумеханізмі (з передачею типу черв'як-ролик) за ведучу ланку править черв'як, якийзакріплено на рульовому валу, а ролик установлено на роликовому підшипнику на одному валу із сошкою. Щоб у разі великого кута повороту черв'яказачепленнябулоповним, нарізкучерв'якавиконують по дузі кола — глобоїду. Такийчерв'якназиваютьглобоїдшш.
У гвинтовомурульовомумеханізміобертаннягвинта, зв'язаного з рульовим валом, передаєтьсягайці, яка закінчуєтьсярейкою, зачепленоюіззубчастим сектором. Сектор установлено наодному валу із сошкою. Такийрульовиймеханізмутворенийрульовою передачею типу гвинт-гайка-сектор.
У шестеренчастихрульовихмеханізмахрульова передача утворюєтьсяциліндричнимиабоконічними шестернями. До них належитьтакож передача типу шестірня-рейка, вякійциліндричнашестірнязв'язана з рульовим валом, а рейка, зачепленаіззуб'ямишестірні, править за поперечну тягу.
Рейковіпередачі й передачі типу черв'як-ролик як такі, щозабезпечуютьпорівняноневеликепередаточне число, застосовуютьпереважно на легковихавтомобілях. Для вантажнихавтомобіліввикористовуютьрульовіпередачі типу черв'як-сектор і гвинт-гайка-сектор, обладнаніабовмонтованими в механізмпідсилювачами, абопідсилювачами, винесеними в рульовий привод.
Конструкціїрульового приводарізнятьсярозташуваннямважелів і тяг, з якихскладаєтьсярульоватрапеція, відноснопередньоїосі. Якщорульовутрапеціюрозміщеноспередупередньоїосі, то такаконструкціярульового привода називаєтьсяпередньоюрульовоютрапецією, а якщопозаду — задньою. На конструктивневиконання й схему рульовоїтрапеціїістотновпливаєконструкціяпідвіскипередніхколіс.
Коли підвісказалежна (див. рис. 2, а), рульовий привод маєпростішуконструкцію, боскладається з мінімуму деталей. Поперечнурульову тягу в цьомуразівиконаносуцільною, а сошка хитається в площині, паралельнійпоздовжнійосіавтомобіля. Можназробити привод і з сошкою, щохитається в площині, паралельнійпередньому мосту. В такому разіпоздовжньої тяги не буде, а зусиллявід сошки передаватиметься прямо на двіпоперечні тяги, зв'язані з цапфами коліс.
Якщопідвіскапередніхколіснезалежна, схема рульового привода (див. рис. 2, б) конструктивно складніша: з'являютьсядодатковідеталі привода, якихнемає в схемііз залежною підвіскоюколіс. Змінюєтьсяконструкціяпоперечноїрульової тяги, їїроблятьрозчленованою, з трьохчастин: основноїпоперечної тяги 4 та двохбічних тяг — лівої 3 й правої 6. Для опориосновної тяги 4 слугуємаятниковийважіль 5, який за формою й розмірамивідповідаєсошці 1. Бічніпоперечні тяги з'єднано з поворотнимиважелями 2 цапф і з основною поперечною тягою за допомогоюшарнірів, якідопускаютьнезалежніпереміщенняколіс у вертикальнійплощині. Розглянуту схему рульового привода застосовуютьпереважно на легковихавтомобілях.