

7.Организация ввода-вывода сигналов для контроллера р-130 (модули усо, алгоритмы связи усо с функциональными алгоблоками).
Контроллер микропроцессорный Ремиконт Р-130 предназначен для построения современных автоматизированных систем управления технологическими процессами (АСУ ТП) и позволяет выполнять оперативное управление с использованием персональных ЭВМ, автоматическое регулирование, автоматическое логикопрограммное управление, автоматическое управление с переменной структурой, защиту и блокировку, сигнализацию, регистрацию событий.
Контроллер микропроцессорный Ремиконт Р-130 имеет проектную компоновку, которая позволяет пользователю выбрать нужный набор модулей и блоков, согласно числу и виду входных – выходных сигналов. В контроллер встроены развитые средства самодиагностики, сигнализации и индентификации неисправностей, в том числе при отказе комплектующих изделий, выходе сигналов за допустимые границы, сбое в ОЗУ, нарушении обмена по кольцевой сети и т.п. Для дистанционной сигнализации об отказе предусмотрены специальные дискретные выходы.
По интерфейсному входу-выходу контроллеры микропроцессорные Ремиконт Р-130 могут объединяться в локальную управляющую сеть «Транзит» кольцевой конфигурации, которая с помощью блока «Шлюз БШ-1» может взаимодействовать с любым внешним абонентом (например, ЭВМ).
Устройство связи с объектом
К устройствам связи с объектом УСО относятся модули: модуль аналоговых сигналов МАС, модуль аналоговых и дискретных сигналов МДА, модуль дискретных сигналов МОД. Технические характеристики модулей УСО:
1) Погрешность преобразования входных аналоговых сигналов постоянного тока в цифровой двоичный сигнал -0,3% от максимального значения выходного сигнала.
2) Основная погрешность преобразования цифровых двоичных сигналов в выходной аналоговый сигнал постоянного тока +: - 0.5% от максимального значения выходного сигнала.
3) входные аналоговые сигналы
Токовые 0…5 мА при входном сопротивлении -500 Ом, 0…20 мА при -100 Ом
4…20 мА при -100 Ом
По напряжению 0…5V при входном сопротивлении -10кОм
4) выходные аналоговые сигналы
Токовые 0….5 мА при входном сопротивлении -2кОм, 0….20 мА при входном сопротивлении -0,5кОм, 4…..20 мА при входном сопротивлении -0.5кОм
5) Дискретные входные сигналы
Логический «0» 2,4V, Логическая «1» 24 V + - 6 V при входном сопротивлении 5 кОм
Организация внешних соединений.
Отдельные блоки изделия РЕМИКОНТ Р-130 имеют розетки штепсельных разъемов РП15 для выполнения соединения между собой и другими устройствами. Потребитель может все внешние цепи подключать непосредственно к этим разъёмам. Такой вариант предполагает, что у потребителя имеются собственные клеммные сборки, к которым эти внешние устройства подключены. От этих сборок соединения ведутся монтажными проводами, которые припаиваются к вилкам разъмов РП-15. Если у потребителя такие клеммные сборки отсутствуют или по условиям монтажа такие соединения недопустимы, используются специальные соединители, входящие в состав комплекта РЕМИКОНТ Р-130. Межблочный соединитель МБС применяется для связи приборных цепей блока контроллера с блоком питания. Соединитель МБС представляет собой отрезок кабеля, заканчивающийся с обеих сторон вилками разъема РП-15. Клемно-блочный соединитель КБС-1 представляет собой отрезок кабеля, с одной стороны которого смонтирована вилка разъема РП-15-9 , а на другой – одноразрядная клемная колодка на 8 клемм.
Общие свойства алгоритмов и алгоблоков.
В общем случае алгоритм обработки информации характеризуется входными и выходными величинами и может быть представлен в виде
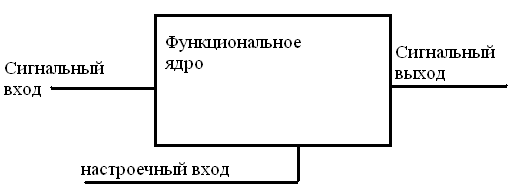
При этом в алгоритме различают два вида входов: а) X сигнальные – по которым подаётся информация подлежащая обработке; б)T настроечные – определяющими параметры настройки алгоритмов. Так, например, алгоритм интегрирования входного сигнала по времени может представлен в виде двухзначной цифры от 01 до 25.
Реквизиты алгоритма.
В общем случае описание алгоритма в библиотеке имеет три реквизита:
1) библиотечный номер; 2) модификатор; 3) Масштаб времени.
Библиотечный номер ( РАН(20), где РАН это код, а 20 это номер ) представляет собой двухзначную десятичную цифру и является основным параметром, характеризующим свойства алгоритма. В библиотеке есть номера, которые не соответствуют ни одному из алгоритмов. Такие номера называются пустыми, а алгоритм соответствующий этому номеру «пустой». Алгоблок с пустым алгоритмом не имеет входов-выходов и никакой работы не выполняет, а также не влияет на работу других алгоблоков, но в ОЗУ занимает определённое место и требует некоторого времени на обслуживание.
Модификатор задает дополнительные свойства алгоритма. Обычно модификатор задает число однотипных операций. Например, в сумматоре модификатор задает число суммируемых входов; в программном задатчике – число участков программы и т.п. В отдельных случаях модификатор задаёт набор определённых параметров, в алгоритме контроля контура регулирования модификатор задаёт параметры контура, локальный контур или каскадный, аналоговым или импульсным регулятором и т.д.
Масштаб времени имеется только в алгоритмах, чья работа связана с реальным временем, например, в таких как регулирование, программный задатчик, таймер и т.д. Масштаб времени задает одну из двух размерностей для временных сигналов или параметров. Если контроллер в целом настроен на младший диапазон , то масштаб времени индивидуально в каждом алгоблоке задает масштаб «секунды» или «минуты». Для старшего диапазона масштаб времени задает «минуты» или «часы». Алгоритмы с одним и тем же номером, помещаемые в различные алгоблоки, могут иметь индивидуальные в каждом алгоблоке модификатор и масштаб времени. Наличие модификатора и масштаба времени существенно расширяет возможности алгоритмов. Например, в одном алгоблоке может размещаться программный задатчик, имеющий несколько участков программы протяжённостью несколько секунд.
8. Характеристика сетевой архитектуры системы на базе контроллеров Р-130. Логическая организация сети «Транзит». Применение алгоритмов ИНВ и ВИН для обмена данными между контроллерами. Особенности передачи дискретных сигналов.
Назначение сети «Транзит» - объединение контроллеров (максимум 15 шт.) в одну управляющую локальную сеть. Контроллеры в сети можно рассматривать как один «большой» контроллер.Контроллеры в сети связываются друг с другом по средствам витой пары проводов. Расстояние между каждой парой соседних контроллеров может достигать 0.5км.(Если контроллеры размещены близко(в пределах одного помещения),экранирование провода не требуется, если далеко+помехи - требуется. Обмен информации со скоростью 9,8 кбит/с. Топология «кольцо». Физически уровень ИРПС (интерфейс радиальной последовательной связи) [токовая петля 20 мА]. Блоки контроллера вкл. Между собой последовательно.
Вкл в сеть (рис 8.11.)
Опасность: разрыв в сети. Защита: защитное реле (БП)( защита от отказов отдельных контроллеров. При отказе,изъятии котнроллера или отключении питания срабатывает спец. реле,шунтирующее контроллер и сохраняющее целостность сети. отказавший контроллер выпадает из обмена ин-фой,а другие продолжают.)
(рис. 7.22.)
Требования: расстояния между контроллерами не более 500 м.
Схема приёма/передачи ИРПС
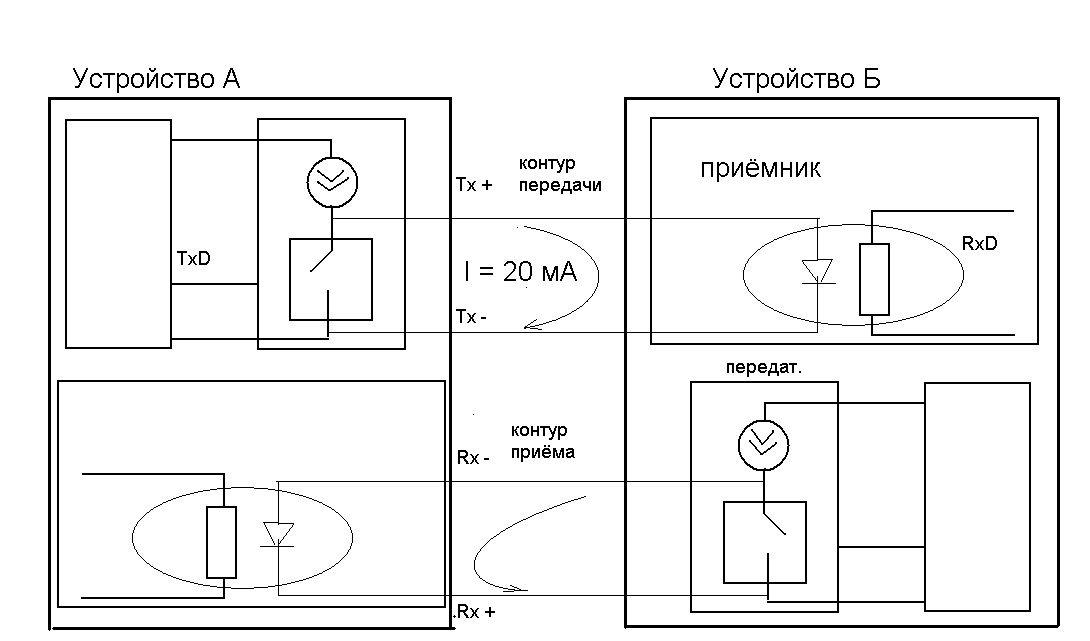
«+» - наличие гальванического разделения между цепями А и Б устройств приёма – передачи
Логическая организация сети «Транзит»
1.Каждому контроллеру присваивается свой системный номер (≤15), присваиваемый в процессе программирования
2.Обмен между блоками контроллеров по сети «Транзит». Используются: ИНВ – интерфейсный вывод, ВИН – ввод интерфейсный.
Возможность обмена по закрытой сети "Транзит"Предназначена для обмена ин-фы между алгоблоками в разных контроллерах.Особенности:
- непосредственно связывать алгоблоки нельзя - используют два алгоритма: интерфейсного вывода ИНВ и ввода интерфейсного ВИН.
-Если др. сигналы каких-либо алгоблоков должны передаваться в др. контроллеры, соответств. выходы алгоблоков по стандартной процедуре конфигурирования связывают с входами алгоритма ИНВ.
-Если какие-либо алгоблоки одного контроллера должны принимать сигналы др. контроллера, их входы по стандартной конфигурации соединяются с выходами алгоритма ВИН.Один алгорит ВИН организует связь только с одним контроллером.Если данному контроллеру нужно связаться с несколькими контроллерами ,в нем программируется несколько алгоритмов ВИН.
Особенности конфигурирования Р130 при обмене по интерфейсному каналу между БК
1). БК источник -> присваивает пакету информации свой системный номер (алгоритм ИНВ)
2). Каждый сигнал имеет свой номер, равный номеру входа ИНВ (Nсигн = Nвх)
В одном БК – только 1 ИНВ (может передавать в сети до 30 сигналов)
Сигналы не адресованы, их может принять любой контроллер
Приём сигнала от другого БК
Нужно соединить ал ВИН с выходом алгоблоков. 1 алг ВИН организует связь только с одним БК-источником.

Один алгоритм ВИН связан с одним блоком контроллеров источника.
В алгоритме ВИН устан. От кого он хочет получать. [номер блока контр. источника]
В ВИН устанавл. Номер сигнала, кот. нужно получить от БК источника
Один ВИН может принимать до 21 сигнала
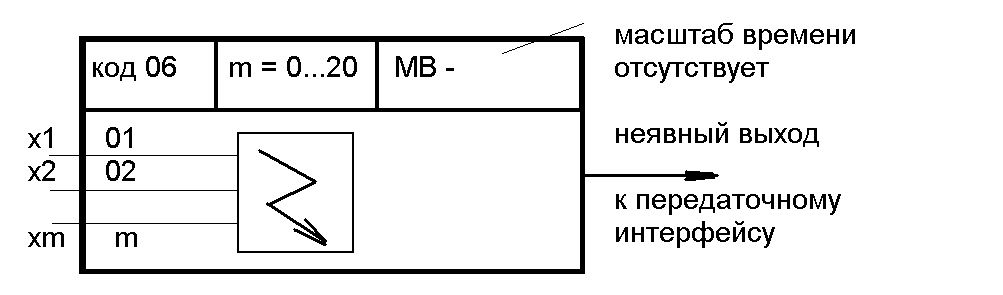
ИНВ
ВИН
Особенности передачи дискретных сигналов.
Каждый условно непрерывный сигнал(аналоговый,временной,числовой) передается по сети "Транзит" в виде двухбайтного числа (передача всех 16бит этого сигнала осуществляется последовательно). В ввиде 2ухбайтного числа можно передать и дискретный сигнал.для этого вход алгоритма ИНВ соединяют непосредственно с дискретным выходом алгоблока.Подобный формат сигнала называется "неупакованным".Чтобы повысить скорость сигналы упаковывают,а потом распоковывают.Упаковка выполняется с помощью алгоритма шифрации ШИФ, а распоковка с помощью ДЕШ(дешифрация).Алгоритм ШИФ,получая на своих входах до 13 дискретных сигналов, формирует на своих выходах числовой сигнал,равный взвешенной сумме входных сигналов.