

2. Характеристика контроллеров р-130. Разновидности моделей контроллеров. Состав комплекта
Контроллер микропроцессорный Ремиконт Р-130 предназначен для построения современных автоматизированных систем управления технологическими процессами (АСУ ТП) и позволяет выполнять оперативное управление с использованием персональных ЭВМ, автоматическое регулирование, автоматическое логикопрограммное управление, автоматическое управление с переменной структурой, защиту и блокировку, сигнализацию, регистрацию событий.
Контроллер микропроцессорный Ремиконт Р-130 имеет проектную компоновку, которая позволяет пользователю выбрать нужный набор модулей и блоков, согласно числу и виду входных – выходных сигналов. В контроллер встроены развитые средства самодиагностики, сигнализации и индентификации неисправностей, в том числе при отказе комплектующих изделий, выходе сигналов за допустимые границы, сбое в ОЗУ, нарушении обмена по кольцевой сети и т.п. Для дистанционной сигнализации об отказе предусмотрены специальные дискретные выходы.
По интерфейсному входу-выходу контроллеры микропроцессорные Ремиконт Р-130 могут объединяться в локальную управляющую сеть «Транзит» кольцевой конфигурации, которая с помощью блока «Шлюз БШ-1» может взаимодействовать с любым внешним абонентом (например, ЭВМ).
Состав
1.Центральный блок (блок контроллеров, БК)
2.Средства связи с объектом
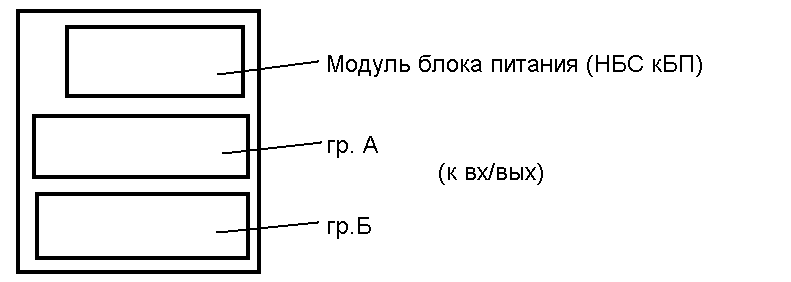
3.Блок питания (БП)
4.Блок шлюзов (БШ) - для связи с верхним уровнем системы управления
Блок контроллеров (БК) может иметь разное исполнение
Модели зависят от назначения и задач:
Модель автоматическошл регулирования (АР)
Модель логическое управление (ЛУ)
Модель непрерывно-дискретного регулирования (сняли с производства)
Модификации. Блок контроллерова Р-130 – зависит от модуля УСО (Есть УСО – А 0...7, УСО –Б 0…7) Каждая цифра характеризует тип моделя УСО (1…7). «0» значит¸что в гнезде ничего не стоит.
Модель АР. Модификация 15 (УСО-А (тип1, тип5) 2AI, 2AO, 8DO, 8DO или 4 импульсных O).
Комплект контроллера не является жёстким (т.е. является проектно-компонуемым изделием)
Компоновка блока контроллера:
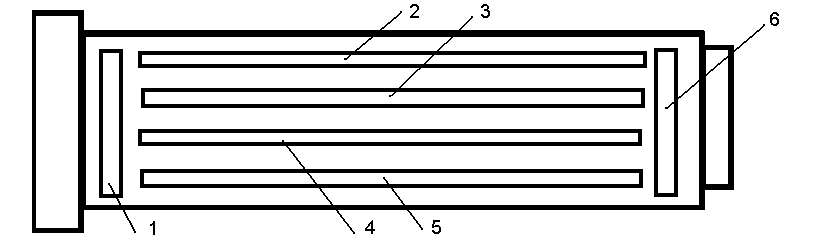
1 – модуль лицевой панели
2 – модуль контроля и программирования
3 – УСО гр. А
4 – УСО гр. Б
5 – модуль процессора
6 – модуль стабилизации напряжения
Вид сзади (разъёмы)
Состав :
БК-1 (блок контроллера) ;
ПН-1 (пульт настройки для технологического программирования блока контроллера) ;
РН-1 (резисторы нормирующие);
МБС (межблочный соединитель) ;
КБС – 0 (клеммно-блочный соединитель для размножения общих точек) ;
КБС-1 (клеммно-блочный соединитель для реализации приборных целей БК-1 и подключения нагрузки к блокам БУТ-1, БУС-10 и БУМ-10) ;
КБС-2 (клеммно-блочный соединитель для дискретных цепей ввода-вывода БК-1 и БПР-10) ; КБС-3 (клеммно-блочный соединитель для аналоговых цепей ввода-вывода БК-1) ;
БП-1 (блок питания) ;
БУТ-10 (блок усилителей сигналов низкого уровня) ;
БУС-10 (блок усилителей сигналов низкого уровня резистивных датчиков(термосопротивлений)) ; БУМ (блок усилителей мощности) ;
БПР-10 (блок переключений) ;
БСТ-1 (блок стирания) ;
БШ-1 (блок шлюза).
3. Характеристика контроллеров Р-130. Структура блоков контроллеров. Виды модулей УСО.
Контроллер микропроцессорный Ремиконт Р-130 предназначен для построения современных автоматизированных систем управления технологическими процессами (АСУ ТП) и позволяет выполнять оперативное управление с использованием персональных ЭВМ, автоматическое регулирование, автоматическое логикопрограммное управление, автоматическое управление с переменной структурой, защиту и блокировку, сигнализацию, регистрацию событий.
Контроллер микропроцессорный Ремиконт Р-130 имеет проектную компоновку, которая позволяет пользователю выбрать нужный набор модулей и блоков, согласно числу и виду входных – выходных сигналов. В контроллер встроены развитые средства самодиагностики, сигнализации и индентификации неисправностей, в том числе при отказе комплектующих изделий, выходе сигналов за допустимые границы, сбое в ОЗУ, нарушении обмена по кольцевой сети и т.п. Для дистанционной сигнализации об отказе предусмотрены специальные дискретные выходы.
По интерфейсному входу-выходу контроллеры микропроцессорные Ремиконт Р-130 могут объединяться в локальную управляющую сеть «Транзит» кольцевой конфигурации, которая с помощью блока «Шлюз БШ-1» может взаимодействовать с любым внешним абонентом (например, ЭВМ).
Структура блоков контроллеров
1.1. Блок контроллера БК-1(И) является основным блоком Ремиконта Р-130 и осуществляет прием аналоговых и дискретных сигналов, формирование необходимых управляющих воздействий, вывод аналоговых и дискретных сигналов, контроль параметров на встроенных цифровых индикаторах и осуществление функций оперативного управления с помощью встроенных на передней панели клавиш.
1.2. Пульт настройки ПН-1 предназначен для программирования блока контроллера и контроля настроечных параметров. Пульт подключается к блоку БК-1 с помощью разъема.
1.3. Блок питания БП-1 предназначен для питания блока БК-1 и вспомогательных блоков и для организации интерфейсных связей контроллеров в локальной сети “Транзит”.
1.4. Блок усилителей сигналов термопар БУТ-10 служит для преобразования сигналов двух термопар в сигнал 0-5mA для ввода в блок БК-1.
1.5. Блок усилителей сигналов термометров сопротивления БУС-10 служит для преобразования сигналов двух термометров сопротивления в сигнал 0-5mA для ввода в блок БК-1.
1.6. Блок усилителей мощности БУМ-10 предназначен для умощнения четырех дискретных сигналов с помощью силовых герконовых реле.
1.7. Блок переключения БПР-10 служит для переключения входных и выходных цепей при реализации резервированных систем управления.
1.8. Блок шлюза БШ-1 служит для организации связи БК-1 или нескольких БК- 1, объединенных в сеть с управляющей ЭВМ верхнего уровня или с другой группой БК-1.
1.9. Блок стирания БСТ-1 предназначен для стирания перепрограммируемой памяти путем облучения ультрафиолетовыми лучами, а также для подзарядки аккумуляторов.
1.10. В состав Ремиконта Р-130 входят три вида клеммно-блочных соединителей КБС, представляющих собой отрезок кабеля, с одной стороны которого припаяна клеммная колодка, с другой,—вилка разъема РП15. Кабель связывает между собой одноименные цепи клеммной колодки и разъема.
КБС-1 имеет колодку на 8 клемм и разъем РП15-9 на 9 контактов (девятый контакт свободен).
КБС-2 имеет колодку на 24 клеммы (24-ая клемма свободна) и разъем РП15-23 на 23 контакта.
КБС-3 (КБС-3И) отличается от КБС-2 лишь тем, что на клеммной колодке распаяны нормирующие резисторы, необходимые для подключения входных аналоговых сигналов. С помощью перемычек для каждого из 8 входов индивидуально выбирается один из трех входных сигналов: 0—5, 0(4)—20 мА, 0—10 В. При верхнем диапазоне 20 мА нижнее значение 0 или 4 мА выбирается программно с помощью алгоритма аналогового ввода.
Неиспользование КБС-3 требует применения нормирующих резисторов РН-1, устанавливаемых на промклеммнике, для преобразования унифицированных сигналов в сигналы, воспринимаемые БК-1.
1.11. Межблочный соединитель МБС предназначен для организации соединения БК-1 с БП-1.
Устройство связи с объектом
К устройствам связи с объектом УСО относятся модули: модуль аналоговых сигналов МАС, модуль аналоговых и дискретных сигналов МДА, модуль дискретных сигналов МОД. Технические характеристики модулей УСО:
1) Погрешность преобразования входных аналоговых сигналов постоянного тока в цифровой двоичный сигнал -0,3% от максимального значения выходного сигнала.
2) Основная погрешность преобразования цифровых двоичных сигналов в выходной аналоговый сигнал постоянного тока +: - 0.5% от максимального значения выходного сигнала.
3) входные аналоговые сигналы
Токовые 0…5 мА при входном сопротивлении -500 Ом,0…20 мА при -100 Ом, 4…20 мА при -100 Ом
По напряжению 0…5V при входном сопротивлении -10кОм
4) выходные аналоговые сигналы
Токовые 0….5 мА при входном сопротивлении -2кОм, 0….20 мА при входном сопротивлении -0,5кОм, 4…..20 мА при входном сопротивлении -0.5кОм
5) Дискретные входные сигналы
Логический «0» 2,4V,Логическая «1» 24 V + - 6 V при входном сопротивлении 5 кОм
4. Характеристика виртуальной структуры контроллеров Р-130. Разновидности входных и выходных алгоритмов.Средства для ввода – вывода сигналов. Общие свойства алгоритмов и алгоблоков. Реквизиты алгоритмов.Содержание процедур технологического программирования.
Контроллер микропроцессорный Ремиконт Р-130 предназначен для построения современных автоматизированных систем управления технологическими процессами (АСУ ТП) и позволяет выполнять оперативное управление с использованием персональных ЭВМ, автоматическое регулирование, автоматическое логикопрограммное управление, автоматическое управление с переменной структурой, защиту и блокировку, сигнализацию, регистрацию событий.
Контроллер микропроцессорный Ремиконт Р-130 имеет проектную компоновку, которая позволяет пользователю выбрать нужный набор модулей и блоков, согласно числу и виду входных – выходных сигналов. В контроллер встроены развитые средства самодиагностики, сигнализации и индентификации неисправностей, в том числе при отказе комплектующих изделий, выходе сигналов за допустимые границы, сбое в ОЗУ, нарушении обмена по кольцевой сети и т.п. Для дистанционной сигнализации об отказе предусмотрены специальные дискретные выходы.
По интерфейсному входу-выходу контроллеры микропроцессорные Ремиконт Р-130 могут объединяться в локальную управляющую сеть «Транзит» кольцевой конфигурации, которая с помощью блока «Шлюз БШ-1» может взаимодействовать с любым внешним абонентом (например, ЭВМ).
Показывает информационную организацию контроллера.Виртуальная структура описывает информационную организацию контроллера и характеризует его как звено ситсемы управления.
Часть элементов виртуальной структуры реализована аппаратно,часть - программно.Все программное обеспечение,реализующее вирт.структуру,зашито в ПЗУ и пользователю недоступно.
Состав виртуальной структуры
Средства ввода-вывода ин-фы
Средства оперативного управления и контроля
Средства интерфейсного канала
алгоритмические блоки (алгоблоки)
библиотека алгоритмов
Средства ввода-вывода.Контроллер расчитан на прием и выдачу 2ух видов сигналов: аналоговых и дискретных. Формирование импульсных сигналов на выходе импульсного регулятора выполняется программно и эти сигналы поступают на исполнительные механизмы через дискретные выходы контроллера.Аппаратура ввода(Входные УСО) преобраз. аналог. и дискрет. сигналы, поступающие на вход контроллера в цифровую форму.Аппаратура вывода осущ. обратное преобразование.
Все входы и выходы аппаратно не привязаны к каким-либо функциям контроллера.Такая привязка осущ. пользователем и реализуется в процессе программирования.(за исключением двух аварийных выходов, чьи сигналы говорят о неисправности контроллера) Существуют специальные алгоритмы, формирующие сигналы ввода-вывода
Средства оперативного управления и настройкиЛицевая панель (для оператора), пульт настройки (программировать прибор, выдавать сигналы в алгоблоки).С помощью лицевой панели оператор-технолог "ведет" технологический процесс: контроль параметров, измен. режимов управ., пуск,останов.,сброс.
Средства интерфейсного канала
В контроллере имеется 1 итерфейсный канал. Этот канал имеет приемо-передатчик, преобразующий входной поток последовательных бит ин-фы в цифр. ин-фу.,представленную ввиде байтов( т.е. преобразующий последовательный код в параллельный), а так же обратное преобраз. Связь с верхним уровнем. Передача осуществляется по сети. Могут передаваться сигналы разного типа (A, D и т.д.). Скорость интерфейсного канала высокая и для инерционных тепловых объектов сигналы по интерфейсному каналу могут считаться полученными одновременно.
Алгоблоки
Реализованные программно алгоблоки образуют область управления контроллера. Каждый алгоритм реализует законченные функции (алгоритмы регулирования)
РАН – рег-р с аналог. вых., РИМ – рег-р с имп. вых., ИНТ – интегратор, ФИЛ – фильтр
В исходном состоянии алгоблоки отсутствуют и никакие функции по обработке сигналов контроллером не выполняются. Алгоблок появляется тогда,когда в процессе программирования в него в него помещается алгоритм из библиотеки.В этом смысле алгоблок - это задействованный алгоритм. т.е. Алгоблоки – место, определённое в области памяти контроллера, куда записываются алгоритмы, необходимые для функционирования. В связи с ограничением памяти количество алгоблоков ограничено до 1000 штук.
Библиотека алгоритмов. Часть библиотеки алгоритмов выполняет особую задачу:связывает аппаратуру контроллера с основной массой функциональных алгоритмов.(ввода-вывода аналог. и дискрет. сигналов, обслуживание лицевой панели и передача сигналов через интерфейсный канал)
Зависит от модели:
алгоритмы регулирования (АР)
алгоритмы управления (АУ)
непрерывно-дискретный
Входы и выходы алгоритма
В общем случае алгоритм имеет свои входы,выходы и функциональное ядро. Входы делятся на : сигнальные и настроечные.Сигналы поступают на сигнальные входы алгоритма, обрабатываются им в соответствии с назначением, а сигналы поступающие на настроечные входы - управляются его параметрами настройки. Так,сигнал, поступающий на вход интергатора- интегрируется, а сигнал поступающий на его настроечный вход - определяет постоянную времени интегрирования
На выходе алгоритма формируются сигналы,являющиеся результатом обрботки алгоритма входных сигналов.
Некоторые алгоритмы имеют "неявные входы"(их нельзя свободно конфигурировать).Это вся группа "связанных" алгоритмов: ввода-вывода,приема передачи,оперативного управления.Как только один из алгоритмов помещается в какой-либо алго-блок ,его неявные входы и/или выходы автоматически соединяются с аппаратурой,обслуживать которую призван данный алгоритм.
Реквизиты алгоритма
библиотечный номер, код(Представляет собой двухзначную десятичную цифру и является основным параметром,характеризующим свойства алгоритма. диапазон от 00..99, например РАН 20, 20 здесь – библиотечный номер)
модификатор (m = …)(задает дополнительные св-ва алгоритма. определяет количество однотипных операций или свойства,которые выполняет 1 алгоритм(напр. в сумматоре - число суммируемых входов).с помощью модификатора задаётся удобный вид информации. каждый канал требует какое-то число времени и памяти.
масштаб времени (МВ)( имеется только в алгоритмах чья работа связана с реальным временем.
Т=57,3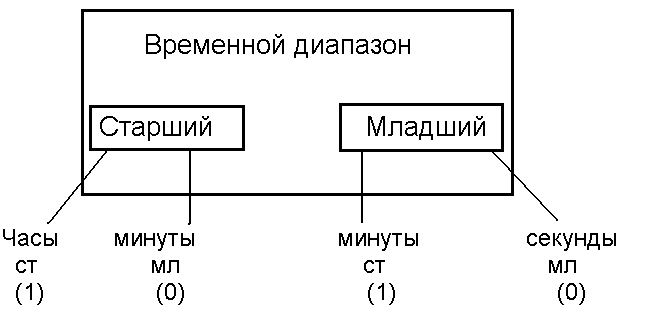
Если Т=57,3, то надо выбирать нули, младший диапазон, минуты.
5. Характеристика виртуальной структуры контроллеров Р-130.Конфигурирование алгоблоков. Особенности обслуживания алгоблоков. Разновидности алгоритмов регулирования.
Виртуальная структура описывает информационную организацию контроллера и характеризует его как звено ситсемы управления.
Часть элементов виртуальной структуры реализована аппаратно,часть - программно.Все программное обеспечение,реализующее вирт.структуру,зашито в ПЗУ и пользователю недоступно.
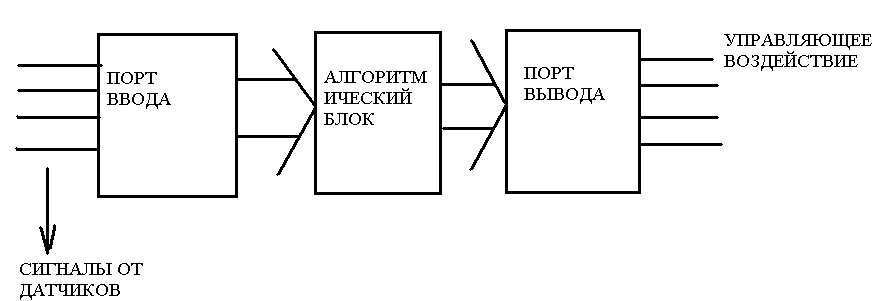
Основным преимуществом микропроцессорных средств автоматического управления и регулирования является программируемость. Микропроцессорный контроллер по сути является миниатюрной электронной вычислительной машиной (ЭВМ), решающей конкретную задачу. Как и ЭВМ контроллер имеет порты ввода и вывода информации и арифметическо-логическое устройство (алгоритмические блоки) для её обработки. При подготовке контроллера к работе в него вводится программа в которой определяются порты ввода-вывода информации, а также алгоритм его обработки. Таким образом, как бы создаётся структурная схема.
Особенность заключается в том, что эта схема существует не в физическом смысле ( в реальности), а на уровне программы, такие структурные схемы получили название виртуальных. Для того чтобы изменить структуру ничего не надо отключать, переключать. Достаточно ввести новую программу с новой структурной связью и алгоритмом обработки.
Виртуальная структура.
Виртуальная структура описывает информационную организацию контроллера и характеризует его как звено системы управления. Часть виртуальной структуры реализуется с помощью аппаратных средств, а часть – программно. Все программное обеспечение виртуальной структуры хранится в ПЗУ и пользователю недоступно, независимо от реализации элементов виртуальной структуры.
Элементы виртуальной структуры.
Аппаратура ввода-вывода информации.
Аппаратура оперативного управления и портом
Аппаратура интерфейсного канала.
Алгоритмические блоки.
5.Библиотека алгоритмов
Задачи конфигурирования: для каждого входа, каждого алгоблока задаётся источник сигнала (т.е. его адрес) Адрес задаётся в виде номер алгоблока и номера его выхода.
Состояния входов: 1.Связанные (подключены с каким-либо выходом А или Б)
2. Свободные ( не подключаются)
Свободные: 1) const ( нельзя изменять в режиме «работа», можно изменять в режиме «программирования»)
2) коэффициент (возможно изменение во всех режимах)
Для свзяанного режима можно ввести инверсию. Инверсию для свободных блоков ввести нельзя.
Обслуживание алгоблоков.
1) Циклически : Т0 – время цикла. Т0=0,2…2,0 сек (дельта t =0.2 сек)
Таб – время затраченное на обслуживание алгоблока, Тин – время затр. на обсл. итнтерфейсного канала, Тсд – время самодиагностики, контроля. Таб + Тин + Тсд < T0,
Резерв. времени : дельта t>=0.08 сек
2) Обработка АБ производится в соответствии с их номерами
Необходимо заботиться о том, чтобы не происходило лишней задержки алгоритмов из-за нумерации АБ.
Конфигурирование алгоблоков.
В процессе конфегурирования для каждого алгоблока задается источник сигнала( только для явных, "неявные" не конфигурируются). Каждый вход алгоблока может находится в одном из след. положений: связанном(соединен с выходом какого-либо алгоблока) или свободном(сигналы устанавливаются оператором вручную в процессе настройки).Сигналы на свободных входах могут быть ввиде: констант(изменять в режиме программировнаия) или коэффициентов(и при работе и при программировании).
Возможности конфигурирования определяются:
1.Любой вход любого алгоблока можно связать с любым выходом алгоблока или оставить свободным.
2.На любом свободном входе любого алгоблока можно вручную задавать сигнал ввиде констант или коэффициетнов.
3.на любом входе алгоблока сигнал можно инвертировать( непрерывные - смена знака, дискретные - изменения состояния 0 или 1)
Обслуживание алгоблоковОбслуживание ведется циклически с постоянным временем цикла.Вначале первый алгоблок,затем второй..и тд. Когда время в пределах установленного цикла истечет программа вновь перейдет к обслуживанию первого цикла.Время изменяется в диапазоне 0,2-2с и устанавливается с шагом 0,2с.В оставшуюся от обслуживания алгоблоков часть времени выполняется самодиагностика контроллера.Помимо этого времени так же требуется время на прием,передачу и обработку сообщений через интерфейсный канал.Общее время должно быть больше чем : время на обслужалгоблоков+интерфейс канала.