

3.2 Способы поиска неисправностей
Если время, затраченное на ремонт изделия, принять за 100%, то поиск неисправного элемента занимает 64%. Поскольку количество элементов в объектах средств автоматизации и особенно в автоматических системах очень велико, то прямой перебор элементов для оценки их состояния невозможен. Поэтому разработка мер по правильному выбору последовательности операций поиска позволяет обеспечить наиболее быстрое определение неисправностей, уменьшить физическую и умственную нагрузку обслуживающего персонала.
При выполнении работ по поиску, устранению неисправностей необходимо придерживаться определенных правил. Технология поиска может быть разбита на основные операции указанные на рисунке 3.2.
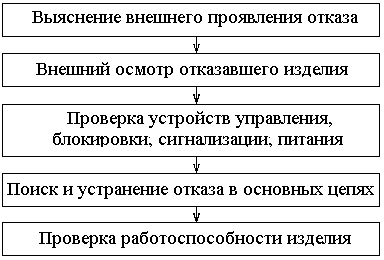
Рисунок 3.2 – Технология поиска отказов (неисправностей)
Процесс поиска неисправностей сводится к проведению различных проверок и принятию решения о дальнейшем развитии поиска на основе результатов проверки.
Независимо от применяемых средств процесс поиска неисправностей имеет две стадии: выбор последовательности проверки элементов; выбор методики (способа) проведения отдельных операций проверки.
Поиск может проводиться по заранее определенной последовательности проверок или ход каждой последующей проверки определяется результатом предыдущей. В зависимости от этого различают следующие методы проверок: последовательных поэлементных, последовательных групповых и комбинационных.
Выбор той или иной последовательности проверок зависти от конструкции изделий в целом или их части, в которой появилась неисправность, и может изменяться в процессе накопления информации по надежности и трудоемкости проверки элементов.
Метод последовательных поэлементных проверок заключается в том, что элементы изделий при поиске неисправности проверяются поодиночке в определенной, заранее установленной последовательности. Если очередной проверяемый элемент оказался исправным, то переходят к проверке следующего элемента. При обнаружении неисправного элемента поиск прекращается, и элемент заменяется (ремонтируется). Затем объект проверяется на работоспособность. Если при этом объект (система) не функционирует нормально, то приступают к дальнейшей проверке. Причем проверка начинается с той позиции, на которой был обнаружен неисправный элемент. При обнаружении второго неисправного элемента он также заменяется или ремонтируется (восстанавливается), и объект вновь проверяется на работоспособность. Если объект работает ненормально, то поиск вновь возобновляется, и так до тех пор, пока объект или система не будут функционировать нормально.

Рисунок 3.3 – Структурная схема системы автоматического регулирования типа “Кристалл”
Простейшим примером использования такого метода может служить поиск неисправности в системе автоматического регулирования одного из параметров технологического процесса. Сначала проверяется регулирующий орган, затем исполнительный механизм, затем усилитель и т.д. Таким образом, устанавливается объект, неисправность которого послужила причиной нарушения нормального функционирования САР (рисунок 3.3).
При обнаружении, например, неисправности в исполнительном механизме, рассматривается поэлементная структура этого устройства (объекта). Предположим, что в качестве исполнительного устройства используется электромеханический привод, представляющий электродвигатель постоянного тока, соединительную муфту (например, фрикционную) и редуктор (рисунок 3.4).

Рисунок 3.4
Здесь можно установить следующую последовательность проверки элементов: 1-2-3-4-5-6-7-8. наиболее уязвимыми из них могут оказаться элементы 1,2,4,7 и 8. Поэтому при использовании поэлементного метода проверки возможны два способа очередности контроля элементов. Если в изделии (системе) используются элементы, длительность проверки которых примерно одинакова, то проверку надо начинать с элементов, обладающих наименьшей надежностью. Для нашего случая это элементы 1,2,4. Если надежность элементов данного изделия примерно одинакова, то целесообразно начинать проверку с элемента, для проверки которого требуется наименьшее время. Например, с защитного устройства 1; затем 2; затем 4. Для успешного использования этих правил необходимо знать не только функциональные и принципиальные схемы объектов и систем, но иметь четкое представление о надежности их элементов.
Недостаток метода – сравнительно большое количество проверок. Объясняется это тем, что в этом методе при поиске не используются функциональные связи элементов, хотя это делает метод универсальным, т.к. он не зависит от функциональной схемы системы.
Метод последовательных групповых проверок состоит в том, что все элементы объекта с учетом их функциональных связей разбиваются на отдельные группы и контролируется исправность каждой группы в целом. Последовательность проведения проверок определяется результатом предыдущей проверки. По мере проведения проверок численность подлежащих проверке элементов уменьшается. На последнем этапе контроля в группе должен быть один элемент.
Пример проведения поиска неисправности по такому методу приведен в функциональной схеме системы на рисунке 3.5 одной из видов САУ.
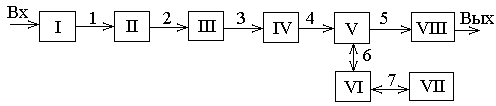
Рисунок 3.5 – Пример структурной схемы САУ
Схема разбивается на группы I-VIII. Затем структура разбивается на две подгруппы и т.д. При этом последовательность проверок будет следующая:
а) Контролируется сигнал в точке 4. Если он нормальный, то переходят к точке 6, т.к. при этом предполагается, что неисправный элемент находится в группе V, VI, VII, VIII. Если сигнал в точке 4 не соответствует норме, то проверяется сигнал в точке 2, т.к. неисправен один из элементов I, II, III, IV. Если сигнал в точке 2 в норме, то элементы I, II исправны, и следует проверять точку 3. При этом выявляется, какой из элементов III или IV неисправен.
б) Если при контроле точек 4 и 6 сигнал соответствует требуемым параметрам, то контролируется точка 5, в результате чего определяется неисправный элемент V или VIII.
При таком методе поиска неисправностей необходимо знать параметры сигналов в контрольных точках, а также типы измерительных приборов и правила их эксплуатации.
Если в объекте (системе) будет несколько неисправностей, то схема поиска неисправностей не изменится. Двигаясь по одной из ветвей структуры, неизбежно приходят к одному из неисправных элементов. После устранения этой неисправности (восстановления элемента) проверяется работоспособность объекта, которая покажет, существует или нет еще неисправность.
При наличии неисправности процесс поиска продолжается (повторяется), что должно привести ко второму неисправному элементу и т.д.
Такой метод еще называется методом средней точки. Однако, в общем случае число, на которое разбивается структурная схема объекта (системы), может быть и не равна двум. Разбивать систему нужно, учитывая функциональные связи отдельных элементов и надежность их работы.
При групповом методе проверок различают проверки “с исключением” и “без исключения”. Проверка “с исключением” состоит в том, что заключение о работоспособности одной из групп элементов делается на основании проверки других групп. Например, имеем три группы элементов. По результатам проверки установили исправность групп 1 и 2. Не делая проверок, заключаем, что неисправный элемент находится в 3-й группе.
При проверках “без исключения” контролируется работоспособность всех групп. На конечном этапе всегда проводится проверка “без исключения”, что устраняет возможность ошибки.
Достоинство этой последовательности проверок – значительное сокращение времени поиска неисправности. Однако этот метод требует знания функциональных связей отдельных элементов и их надежности.
Сущность комбинационного метода проверок заключается в одновременном измерении нескольких параметров (например параметра А, В, С, Д на рисунке 3.6). По результатам измерений всех параметров делается заключение о неисправном элементе.
Для удобства пользования таким методом составляют таблицы состояния контролируемых параметров. В качестве элементов в этом случае следует выбирать блок, узел, последовательную неразветвленную группу каскадов.
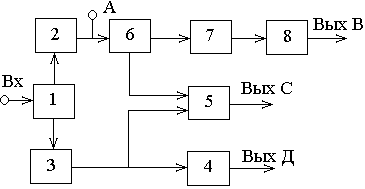
Рисунок 3.6 – К использованию комбинационного метода проверок.
Таблица 3.2 – График состояний
-
Элементы
Параметры
А
В
С
Д
1
0
0
0
0
2
0
0
0
1
3
1
1
0
0
4
1
1
1
0
5
1
1
0
1
6
1
0
0
1
7
1
0
1
1
8
1
0
1
1
В первом вертикальном столбце таблицы 3.2 указаны элементы структурной схемы, а в первой строке – их параметры. Таблицу заполняют по стрелкам в соответствии со следующими правилами.
Поочередно предполагается неисправность только в данном элементе. Данная неисправность приводит к выводу соответствующих параметров за пределы допусков. Против этих параметров в таблице ставится «0». Если же заданная неисправность не влияет на какой-то параметр, то против этого параметра ставится «1».
Полагаем, что элемент 1 (рисунке 3.6) неисправен. Тогда, очевидно, что все параметры А, В, С и Д выйдут за пределы допусков. Против этих параметров в таблице ставится «0», т.е. первая строка таблицы 2 будет состоять из одних нулей. Затем предполагаем, что неисправен элемент 2 , при этом параметры А, В и С будут не соответствовать нормам, а параметр Д будет в норме. Во второю строку следует записать «0001». Таким образом перебирают все элементы и анализируют состояние параметров. Одинаковые стоки (7 и 8 таблицы 3.2) говорят о не различении данной системой (объектом) параметров неисправностей элементов 7 и 8. В этом случае элементы объединяются в один или вводят дополнительный параметр для их различения.
Для обнаружения неисправного элемента с помощью такой таблицы, поступают следующим образом. Оператор записывает значения параметров в виде числа, состоящего из нулей и единиц, по указанному правилу. Для определения неисправного элемента сравнивают полученное число с числами в строках таблицы. С какой строкой таблицы совпадают результаты измерения параметров, тот элемент и неисправен. Если результат измерения параметров (числа) не совпадает ни с одной строкой таблицы, неисправны несколько элементов.
Достоинство этого метода – относительно малое время поиска неисправности, однако реализация его трудна.
Последовательность процесса поиска неисправностей носит название программы поиска. Определенная последовательность проверок, обеспечивающая минимальное значение математического ожидания времени проверок, просчитывается с помощью создания математической модели процесса поиска отказавшего элемента.
Объект, в котором появилась неисправность, состоит из n элементов. Отказы элементов независимы. При отказе любого из элементов отказывает объект. Для контроля исправности элемента имеется возможность подать на вход контрольный сигнал и проверить на выходе реакцию на этот сигнал. Известны интенсивности отказов элементов q и потребное время τ на проверку их исправности. Определяют последовательность проверок элементов, обеспечивающих наименьшее время поиска неисправности.
Оптимальная последовательность должна обладать следующим свойством:
![]() ,
(3.8)
,
(3.8)
где τ – среднее время проверки исправного элемента; q – условная вероятность отказа элемента.
Если время контроля исправности всех элементов равны, то оптимальная последовательность принимает вид:
q1>q2>…>qn-1, (3.9)
Т.е. контроль исправности элемента следует производить в порядке убывания условной вероятности отказов элементов.
Последовательность (3.9) можно записать более удобном виде:
λ1> λ 2>…> λ n-1, (3.10)
Среднее время поиска неисправностей по программе вычисляют по формуле:
![]() ,
(3.11)
,
(3.11)
где τИЗ.i – врем, расходуемое на измерения при отказе i-го элемента.
В свою очередь:
![]() ,
(3.12)
,
(3.12)
где τR – время, расходуемое на измерения в точке К схемы; ri – число измерений по программе для выявления отказа i-го элемента.
С учетом (3.12):
![]() ,
(3.13)
,
(3.13)
Порядок построения программ можно рассмотреть на примерах.
Пример 3.1.
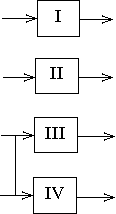
Рисунок 3.7 – Структурная схема изделия А.
Имеется схема, представленная на рисунке 3.7. Интенсивности отказов элементов: λ1=0,1 1/ч; λ2=0,2 1/ч; λ3=0,2 1/ч; λ4=0,5 1/ч. Время измерения в точках схемы: τ1=5 мин.; τ2=8 мин.; τ3=12 мин.; τ4=18 мин. Требуется составить оптимальную схему программы поиска неисправности при условии, что один их элементов изделия А отказал.
Определяются условные вероятности отказов. Для метода последовательных поэлементных проверок условные вероятности отказов q по значению соответствуют λ. Тогда q1=0,1; q2=0,2; q3=0,2; q4=0,5. Определяют частные: τ1/ q1=50; τ2/ q2=40; τ3/ q3=60; τ4/ q4=36;
Согласно (3.8) первое измерение необходимо производить на выходе четвертого (IV) элемента. Если сигнал нужного вида на выходе элемента IV, то следует продолжать поиск и очередные измерения производить на выходе второго (II) элемента и т.д.
Для аналитического представления процесса поиска неисправности, как правило, применяют его графическое изображение в виде программы поиска неисправностей. Условное обозначение элемента производят в виде прямоугольника, а измерение в виде круга внутри с номерами элемента, за которым производится измерение. Тогда программа поиска неисправности будет представлена ветвящейся схемой, состоящей из кружочков с двумя выходами, обозначающих результат измерения (есть нужный сигнал или нет – “да” или ”нет”) и оканчивающейся прямоугольниками, обозначающими неисправный элемент.
Программа поиска для примера 3.1 приведена на рисунке 3.8.
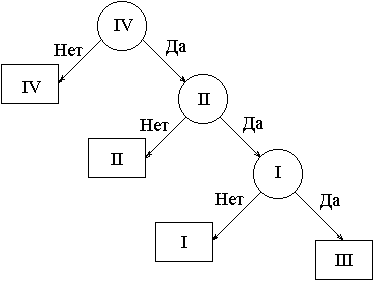
Рисунок 3.8 – Программа поиска неисправностей в изделии А
Среднее время поиска неисправностей по программе вычисляется по формуле (3.13). Тогда:
ТПН=q1(τ4+τ2+τ1)+q2(τ4+τ2)+q3(τ4+τ2+τ1)+q4τ4=0.1(18+8+5)+0.2(18+6)+0.2(18+8+5)+0.5*18=23.5 мин.
Пример 3.2.
Имеется схема, представленная на рисунке 3.9. Интенсивности отказов элементов: λ1=0,56*10-4 1/ч; λ2=0,48*10-4 1/ч; λ3=0,26*10-4 1/ч; λ4=0,2*10-4 1/ч; λ5=0,32*10-4 1/ч; λ6=0,18*10-4 1/ч. Время измерения во всех точках одинаково и составляет 2 мин. Требуется составить оптимальную программу поиска неисправности при условии, что один из элементов отказал.

Рисунок 3.9 – Структурная схема изделия Б
Рисунок 3.10 – Программа поиска неисправностей в изделии Б.
Для сокращения времени поиска неисправности используется метод последовательной погрупповой проверки, т.е. измерение реакции на контрольный сигнал производится в точке схемы, которая делит предполагаемую неисправную схему по вероятности (интенсивности) пополам.
Отсюда условная вероятность отказов соответствует значению интенсивности с коэффициентом 0,5 (половинной величине).
Тогда условные вероятности отказов: q1=0,28; q2=0,24; q3=0,13; q4=0,10; q5=0,16; q6=0,09.
Схема состоит из последовательно соединенных элементов. Можно использовать один контрольный сигнал, подаваемый на вход первого элемента. В этом случае первое измерение необходимо производить после второго элемента, ибо q1+;q2=0,52, ближе всего к делению схемы по вероятности пополам. Если нужного сигнала нет после второго элемента, то делается вывод о неисправности первого или второго элемента и измерение производится после первого элемента. Если после второго элемента ест нужный сигнал, то делается вывод о неисправности правой части схемы, которая по вероятности лучше всего делится пополам в точке измерения после четвертого элемента и т.д.
Программа поиска неисправности в этой схеме приведена на рисунке 3.10. Среднее время поиска неисправности по программе:
ТП.Н.=0,28(2+2)+0,24(2+2)+0,13(2+2+2)+0,20(2+2+2)+0,16(2+2+2)+0,9(2+2+2)=5,56 мин.
При поиске неисправностей, кроме выбора метода и программы поиска неисправности объекта (системы), необходимо выбрать методику (способы) проверки исправности отдельных элементов. Наиболее распространенные способы проверок исправности элементов:
внешний осмотр;
контрольные переключения и регулировки;
промежуточные измерения;
замена;
сравнение;
характерные неисправности;
изоляция блока или каскада, узла;
тест – сигналы.
Внешний осмотр обычно подразумевает использование зрения и слуха. Они позволяют контролировать состояние монтажа СА, кабелей, отдельных элементов, печатных плат и т.п., а также проверять работу ряда агрегатов, реже на слух.
Преимущество этого вида проверок в простоте. Однако возможности определения неисправного элемента ограничены. Неисправность может быть определена только при явно выраженных внешних признаках: изменение цвета элемента под воздействием температуры, искрения, появление дыма и запаха от горения изоляции проводов и т.д. Такие признаки возникают сравнительно редко. Кроме того, на практике часто встречаются взаимозависимые отказы, поэтому даже если внешним осмотром обнаружен неисправный элемент, необходимо провести дополнительные проверки для выявления истинных причин отказа (например, при выходе из строя предохранителя, перегоревшую нить которого видно “на глаз”).
Способ контрольных переключений и регулировок требует оценки внешних признаков неисправностей путем анализа схем и использованием органов переключения, регулировок, текущего контроля (сигнальные лампочки, встроенные приборы, автоматы защиты и т.п.). При этом определяется неисправный узел, блок или тракт схемы объекта (системы), т.е. совокупность элементов, выполняющих определенную функцию объекта (преобразовательный, индикаторный блоки, блок защиты или коммутации, передающий тракт и т.д.).
Достоинство способа в быстроте и простоте проверки предположения о состоянии участков схемы объекта.
Недостаток – ограниченность, т.к. позволяет определить участки, а не конкретное место повреждения.
Способ промежуточных измерений является наиболее распространенным и основным для электрических и электронных устройств. Параметры системы, блока, узла или элемента определяются с помощью ручной портативной или автоматизированной встроенной контрольно – измерительной аппаратуры (КИА) или придаваемых к средствам автоматизации специальных измерительных устройств, систем автоматического контроля.
При этом измеряются режимы питания, параметры линий связи, проводятся измерения в контрольных точках. Быстроту отыскания неисправности в немалой мере обеспечивает умение обслуживающего персонала грамотно проводить измерения. Полученные значения параметров сравнивают с их значениями из технической документации, с таблицами режимов данного изделия, например.
Способ замены заключается в тои, что вместо подозреваемого в неисправности элемента (узла, блока и т.п.) устанавливают аналогичный заведомо исправный элемент. После замены проверяют объект (систему) на функционирование. Если при этом параметры системы лежат в пределах нормы, то делается вывод о том, что замененный элемент неисправен. Преимущество данного способа – простота. Но на практике этот способ имеет ограничения, во-первых, из-за отсутствия запасных элементов, во-вторых, из-за необходимости проведения регулировок вследствие недостаточной взаимозаменяемости.
Зависимые отказы могут привести к выходу их строя вновь установленного элемента, поэтому этот вид проверки используют, когда подозреваемый элемент легко съемный и недорогой.
Способ сравнения – режим неисправного участка (узла, блока) объекта или системы сравнивается с режимом однотипного участка исправного объекта. Достоинство способа в отсутствии необходимости знаний абсолютных значений, измеряемых величин и параметров. В то же время этот способ позволяет определять довольно сложные неисправности. Недостаток способа – необходимость запасного (стендового) комплекта оборудования и, как следствие, возможность применения этого способа только в условиях лаборатории.
При способе характерных неисправностей отказ отыскивается на основании известных характерных признаков. Такие неисправности и их признаки представляются в виде таблиц в инструкции по эксплуатации СА.
Таблицы характерных неисправностей обладают рядом недостатков, из которых наиболее существенны следующие:
таблицы не обеспечивают однозначной связи между признаками отказа и возможными неисправностями: к одному признаку привязываются несколько различных неисправностей и обычно без каких –либо указаний на особенности их появления;
в таблицах часто отсутствует указания о проведении испытаний, направленных на уточнение причины отказов. Отдельный внешний признак не может указать на конкретную причину отказа, а для ее отыскания необходимо логическое сопоставление целого ряда внешних признаков, включая показания устройств контроля и результаты испытаний;
действия по поиску отказа, рекомендуемые таблицами, не содержат причинно-следственных связей и не распределяются в порядке их следования, в то время как реальный поиск представляет собой четкую последовательность различных проверок (испытаний).
Тест-сигналы широко применяются в различных вычислительных машинах, в счетно-решающих устройствах. При этой проверке на вход контролируемого устройства подается сигнал с определенными характеристиками. Анализ выходного сигнала позволяет определять место неисправного элемента.
Изоляция блока (узла, участка, каскада) обоснована тем, что в ряде случаев блок или каскад связан большим числом функциональных связей с другими частями объекта. При отказе такого блока трудно определить, где возникла неисправность – в самом блоке или в функционально связанных с ним частях изделия. Отсоединение некоторых функциональных связей позволяет иногда локализовать местонахождение неисправного элемента.
Каждый из рассмотренных частных способов поиска неисправностей имеет существенные ограничения, поэтому в практике ремонта КИП и СА обычно применяют совместно несколько частных способов. Такое совмещение способов позволяет сократить общее время поиска и тем самым способствует его успеху.