

Приведений до валу двигуна момент інерції приводу
•^ТТП=^ТТ+«^П+
,пр~*/д-г*/р"г 7-2 ^ ПШК ’ и ШК ’І У 7)
/І V / ^ІЖ-7 /
+ (2-^ + ОТз +тК)-\^/і2;
1пР = 4.5 + 4 +120%52 + 6 • 1000 ■ (%8)2/252 +
+ (2 • 7 + 9 + 2.3) • 103/252 = 62.77 кг • м2;
Кутове прискореня двигуна
є = а • / ; є = 0.6 ■ 25 = 15 рад/с2 ,
Момент двигуна, який забезпечить рівноприскорений рух скіпа М = Мс + /пр • є ; М = 4085.7 + 62.77 ■ 15 = 5027 Н • м .
Для механізму, кінематична схема якого зображена на рис. 1.13, визначити момент двигуна, необхідний для забезпечення в період розгону середньго прискорення а — 1.5 рад/с2. Знайти також зусилля в канаті без врахування і з врахуванням його жорсткості.
Вихідні дані для розрахунків: маса вантажу т1 = 5000 кг; маса противаги т2 = 3500 кг; момент інерції привідного двигуна J = 3.2 кг . м2; момент інерції редуктора, приведений до швид-
кохідного
вала J
=2.8 кг . м2;
#
момент інерції барабана У, =
500 кг.
м2;
діаметр барабана
Х)6
= 2.0 м; передавальне чис-
ло редуктора
і
= 20; ККД пе-
редач л
= 0.8; жорсткість од-
ного метра канату
с
=
6 .10 7
Н;
довжина канату = 300 м.
1.28.
Визначити, з яким
прискоренням буде
опуска-
тись вантаж тх
у механізмі,
кінематична
схема якого зображена на рис. 1.13, якщо
привід-
ний двигун вимкнути з мережі,
а механічне гальмо не буде
працювати.
Дані механізму наведені в задачі 1.27.
1.29.
Визначити, як буде змінюватись швидкість
і амплітуда
коливань підвішеного
вантажу при
розгоні
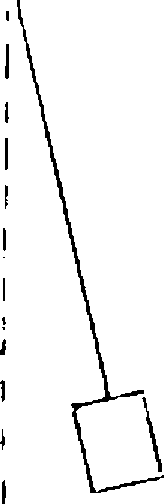
візка крана (рис. 1.14), та
величину
моменту, який повинен
розвивати
двигун, щоб зменшити
амплітуду
коливань вантажу в два
рази.
Вихідні
дані для розрахунків:
маса візка т.
= 7000 кг; маса ван-
тажу т2
= 14000 кг; довжина під-
віски / = 4.0 м;
жорсткість 1 м ка-
нату с
= 5.105
Н; момент інерції
двигуна і зв’язаних
з ним обер-
тальних
частин / = 0.3 кг. м2;
передавальне число редуктора /
= 20;
діаметр ходового колеса візка = 0.5 м;
середній момент
двигуна М
= 100 Н . м; момент статичного опору М
= 30 Н . м.
де с
Втратами
в передачах знехтувати.
—
□
Рис-
1.13
V.
СП
Д'10
Г
ї
Рис.
1.14
Розв’язок
Розрахункова
модель, виконана відносно лі нійної
швидкості V,
наведена
на рис. 1.15.
Радіус
приведення параметрів
Я
—ЛЛ^-
т
т
Рс
Рис.
1.15
О
0.5
2
• 20
к
=
0.0125 м
Р
=
Р
=
2-і
5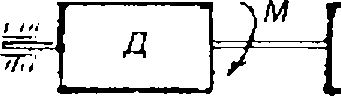
Приведене зусилля від моменту двигуна
F
= Mæ.
; F
= 100
= 8000 H
. p
’ 0.0125
Приведене зусилля від статичного моменту
F‘-T’
Приведена маса двигуна
т„ зв = ; »ід зв = ——у = 2 • 103 кг. дзв р2 ’ д 0.0125
Сумарні приведені маси
^ т = отд зв + тв + т ; ^ т = 2000 + 7000 +14000 = 23 • 103 кг ;
т\ = тА зв + тв ? = 2000 + 7000 = 9 • Ю3 кг .
Середнє значення прискорення
F-Fç 8000 - 2400
а
=
т ’ 23000 7
Жорсткість канату
Ск = Т ; СК = ^- = 25 • 103 Н/м .
*1
Частота коливань
т „ /25 -103 - 23 • 103
Q = і ч— Г = 2-1 1/с.
11 9 -10 • 14 -10
Щ-Щ
Швидкість переміщення v2 = а • і - (a/Q) • sin Qf ; v2 = 0.24 * ґ — 0.114 - sin 21t. Величина відхилення вантажу
As
=
J
vxdt
- J
v2dt
= - a
mi
cos
Qt.
А
з
25
• 10
а
- т2
.
ск
Скласти розрахункову модель, знайти момент М,, що передається через вал 2 (рис. 1.16), та коефіцієнт динамічного перевантаження £д при таких умовах: вхідний момент М = const
м
п.
М&х
(}.К
Рис.
1.16
D
механізму JK = 80 кг.м2. ККД передач: Лі = 0.92, т,, = 0.9; передавальні числа: і = 4.0, /, = 5.0; жорсткість другого валу с, = 8.105 Н.м; момент статичного навантаження механізму Ми = 800 Н.м.
Ч! ■ II1' •
р шшш?/////;///
Рис. 1.17
 Визначити,
який момент повинен розвивати кожен
із двигунів приводу механізму поворотної
платформи екскаватора, кінематична
схема якого наведена на рис. 1.17, щоб
забезпечити її розгін з постійним
прискоренням є
= 0.05 рад/с2.
Визначити також момент, який
передається через вал 1
і коефіцієнт динамічного перевантаження,
якщо жорсткість цього вала с2
= 8.103 Н
.м /рад, а люфт передачі, приведений до
валу двигуна, становить п
радіан.
Визначити,
який момент повинен розвивати кожен
із двигунів приводу механізму поворотної
платформи екскаватора, кінематична
схема якого наведена на рис. 1.17, щоб
забезпечити її розгін з постійним
прискоренням є
= 0.05 рад/с2.
Визначити також момент, який
передається через вал 1
і коефіцієнт динамічного перевантаження,
якщо жорсткість цього вала с2
= 8.103 Н
.м /рад, а люфт передачі, приведений до
валу двигуна, становить п
радіан.
Параметри привідних двигунів і передач однакові. Момент інерції кожного приводного двигуна / = 30 кг.м2; момент інерції поворотної платформи зі всім обладнанням Jm = 16 0.106 кг. м2; передавальні числа передач: = 20, і2 = 25; ККД першої передачі (з і]) ^ = 0.92, другої передачі (з і2) ^ = 0.9; момент статичного опору на валі двигуна становить 10% від динамічного моменту. Момент інерції редукторів не враховувати і вважати, що втрати в редукторі пос-
тшні и не залежать від статичного навантаження.
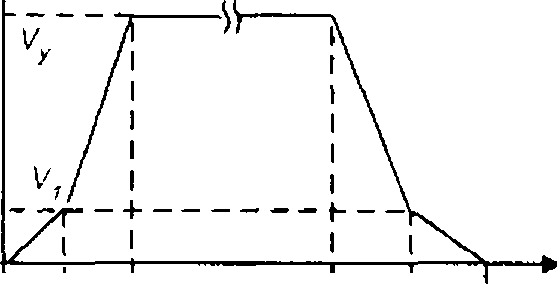
Для шахтного підіймача (рис. 1.7) з задан грамою руху (рис. 1.18) побудувати навантажувальну
16
механізму (діаграму зусиль у підіймальному канаті), якщо відомі такі параметри: швидкості руху кліті \\ =1.5 м/с, V = 4.5 м/с; допустиме прискорення в інтервалі часу ^ дорівнює 1.1 м/с2, а в інтервалі - 4.1 м/с2; висота підіймання Н — 800 м; маса вантажу т? = 6 ,105 кг; маса кліті т,= 5.105 кг; маса одного метра підіймального канату р = 3.1 кг; маса од- ного метра зрівноважувального канату q = 2.6 кг; довжина підіймального канату /. =
V
«
І
І
Рис.
1.18Чи
*
![]() 800
м; довжина зрівноважувального канату
/ = 800 м; маса обертових частин механізму,
приведена до швидкості підіймального
канату, ту
= 9500 кг.
800
м; довжина зрівноважувального канату
/ = 800 м; маса обертових частин механізму,
приведена до швидкості підіймального
канату, ту
= 9500 кг.
Розрахунок статичного зусилля в канаті ведеться за формулою:
Г = к • т • ё + (р - д) ■ (Н - 2НХ) ■ g (Н) ;
де к - коефіцієнт шахтних опорів, (можна прийняти £=1.1 ^1.2);
- прискорення сили тяжіння; к - шлях, що пройшла кліть з початку підіймання.
а.
Розрахувати і побудувати графік зміни моменту електродвигуна, який би забезпечував виконання тахограми руху механізму (задача 1.32), якщо момент інерції двигуна / = 4.15 кг.м2, усталена швидкість обертання двигуна = 800 об/хв, ККД передач л = 0.75.
Визначити момент на валі барабана в період розгону підіймача (задача 1.32), якщо момент інерції барабана / = 800 кг . м2, його діаметр В6 = 2.5 м.
Нарис. 1.19 наведена діаграма зміни прискорення є при розгоні та гальмуванні електроприводу. Розрахувати та побудувати тахограму і діаграму зміни моменту двигуна, яка забезпечує задану діаграму прискорення. Тривалості часу на діаграмі:
(1 = = К = и = 2 с; *2 = и = 4 с;
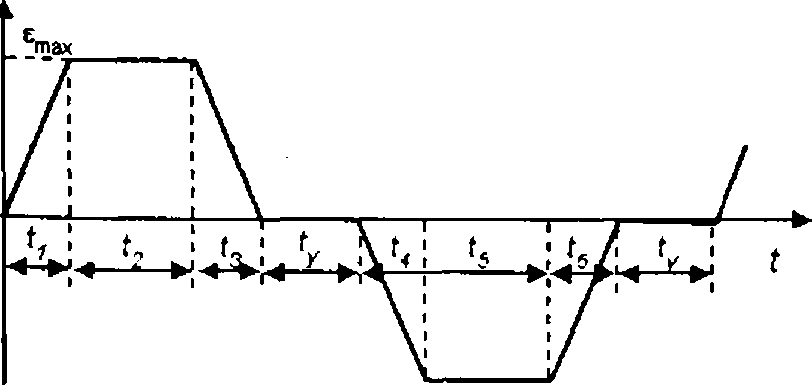 час
ро боти на
усталеній
швидкості ґ =
8 с. Сумарний
приведений
до вала двигуна
момент
інерції
приводу
/р
= 2.4 кг.м2;
максимальне
прискорення Єіша
= 50
рад/
час
ро боти на
усталеній
швидкості ґ =
8 с. Сумарний
приведений
до вала двигуна
момент
інерції
приводу
/р
= 2.4 кг.м2;
максимальне
прискорення Єіша
= 50
рад/
с2; момент статичного опору Мс Рис. 1.19 =25 Н.м.
Визначити, як змінюється статичний момент на валі барабана шахтної підіймальної установки (рис. 1.20) зі змінним радіусом навивання канату в залежності від кута повороту барабана ф. А саме, який буде статичний момент Мс при таких кутах повороту барабана: фі = 0, у2 = фш /2, = фш; де <рш - максимальний кут повороту, який забезпечує підіймання вантажу на задану висоту Ь.
І
д
Д
- двигун Р - редуктор В - барабан К
*■ кліть
т*т9
+ тк
Рис.
1.20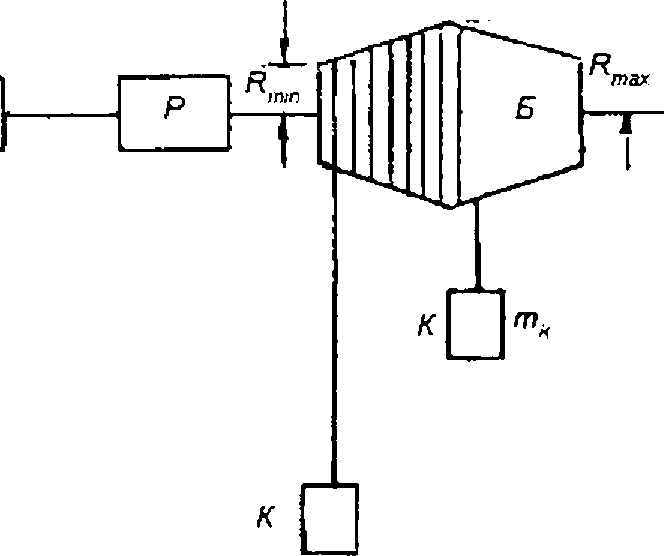 Вихідні
дані: Маса вантажу тъ
= 3000 кг, маса посудини тв
= 3500 кг,
подовжинна маса канату рт,
= 3.1 кг/м, висота під-
Вихідні
дані: Маса вантажу тъ
= 3000 кг, маса посудини тв
= 3500 кг,
подовжинна маса канату рт,
= 3.1 кг/м, висота під-
л
німання Ь = 350 м, мінімальний радіус барабана Ятіл = 1.5 м, максимальний радіус барабана і?тах =
м.
Визначити момент на валі двигуна шахтної підіймальної установки (рис. 1.20) в кінці розгону до усталеної швидкості, якщо прискорення барабана при розгоні постійне і рівне 0.5 рад/с2, усталена швидкість обертання двигуна пу = 420 об/хв; передавальне число редуктора / = 11, момент інерції барабана X = 560 кг.м2, ККД передач л = 0.9.
Нарис. 1.21 наведена кінематична схема і тахограма руху робочих рольгангів. На відрізку 0-1-2 тахограми рольганг переміщує металеву заготовку, на відрізку 3-4 гальмується без заготовки. Розрахувати і побудувати навантажувальну діаграму двигуна. Вихідні дані: маса переміщуваного металу ти = 4.105
а)
б)
Д
- двигун П - редуктор Т - трансмісія Р-
ролик
V
Рис.
1.21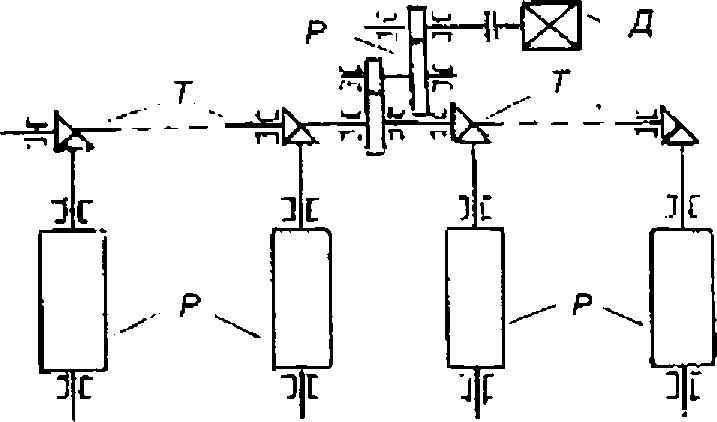
прискорення і сповільнення рольгангу І а \ = 1.5 м/с2.
Розрахувати, як буде змінюватись зусилля в канаті шахтної підіймальної установки (рис. 1.13), яка приводиться в рух асинхронним двигуном з фазним ротором потужністю Ря = 500 кВт (лн = 953 об/хв, = 2.2, / = 228 кг . м2), при розгоні з початковим пусковим моментом Ми = 1.8 Л/. Механічну характеристику вважати прямолінійною. Сумарний момент інерції обертових частин механізму, приведений до валу двигуна, /мпр = 156 кг.м2; маса кліті з вантажем тг = 15 .103 кг; жорсткість одного метра канату с, = 1.8.10* Н .м; довжина канату / = 450 м; передавальне число редуктора і = 13; діаметр барабану Л. —
м.
Визначити також величину максимального зусилля в канаті, якщо пусковий момент залишатиметься постійним і рівним 1.8 Мн'
Скласти структурну схему й визначити всі її параметри для шахтної підіймальної установки (рис. 1.16), яка приводиться в рух асинхронним двигуном з фазним ротором при розгоні з послідовно ввімкненими в колі ротора резисторами. Завантжена посудина знаходиться в нижньому положенні. Штучну механічну характеристику асинхронного двигуна вважати прямолінійною. Жорсткість одного метра підіймального канату с. = 2.2 .108 Н.м. Момент інерції двигуна ^ = 3.1 кг.м2; усталена швидкість підіймання посудини гм = 4.5 м/с відповідає номінальній швидкості обертання двигуна пк = 570 об/хв; середнє прискорення посудини ак = 3.1 м/с2.
Робочий механізм з’єднаний з редуктором за допомогою довгого валу, який має жорсткість с = ЗЛО5 Н.м/рад. Коефіцієнт в’язкого тертя передачі ср = 2 .103 Н . м с/рад; момент інерції механізму 7м = 420 кг.м2; момент інерції двигуна з редуктором ^ = 1.2 кг .м2; передавальне число приводу і = 20; ККД передач г| = 0.9. Момент статичного навантаження механізму Ми = 2700 Н .м; момент, який розвиває двигун під час розгону, вважати постійним і рівним М = 350 Н .м.
Визначити закон зміни моменту, що передається через гнучкий, вал та порівняти максимальні значення моментів з врахуванням і без в’язкого тертя.
Розв’язок
Середнє кутове прискорення валу
350
20 - 2700/0.9 ^
У, і2 + /м ' р 1.2 • 20 + 420
Частота коливань моменту при відсутності в'язкого тертя
^С{2 • (л • *Р + «^м)/(Л * гр ^м) ;
Q = ^3 • 105 • (і.2 • 202 + 42о)Ді.2 • 202 • 42о) = 36.6 1/с .
Коефіцієнт заникання
а = Ріг • П2/2 • с12 ; а = 2 ■ 103 • 36.62/2 ■ 3 • 105=4.47 1/с . Частота коливань моменту при наявності в’язкого тертя Q0 = Jn2 - а2 ; Q0 = ч/зб.б2 - 4.472 = 36.5 1/с •
Закон зміни моменту, що передається через гнучкий вал
мв = ми +/м -есер ~/м -єсер-е-‘ • ((а • sin П0/) / Q0 + cosO0/);
Л/в = 2700 + 420 • 4.4 - 420 ■ 4.4 • еАЛ1‘ • (X); де: (X) = ((4.47 • sin Зб.5ґ) / 36.5 + cos 36.5/).
Максимальне значення моменту при відсутності в’язкого тертя
Мв0 = 2700 + 420 • 4.4 + 420 - 4.4 = 6396 Н • м .
Максимальне значений Моменту при наявності в’язкого тертя буде, якщо Q0t = тт, тобто при t = л/36.5 = 0.086 с.
Мъ ш = 2700 + 420 • 4.4 + 420 • 4.4 • е~0'384 = 5812 Н • м
Співвідношення моментів ки = Мъ JЛґр0
ки = 5812/6396 = 0.909 .
Максимальне значення моменту при наявності в’язкого тертя зменшиться на 91 %.
На рис. 1.22 зображена кінематична схема механізму
підіймання екскаватора ЕКГ 36/65А. Основні параметри механізму: момент інерції барабанів з муфтами й гальмівними шківами X = 300 ,104 кг.м2; вага ковша з вантажем Gr = 130 т; вага
О к
Рис.
1.22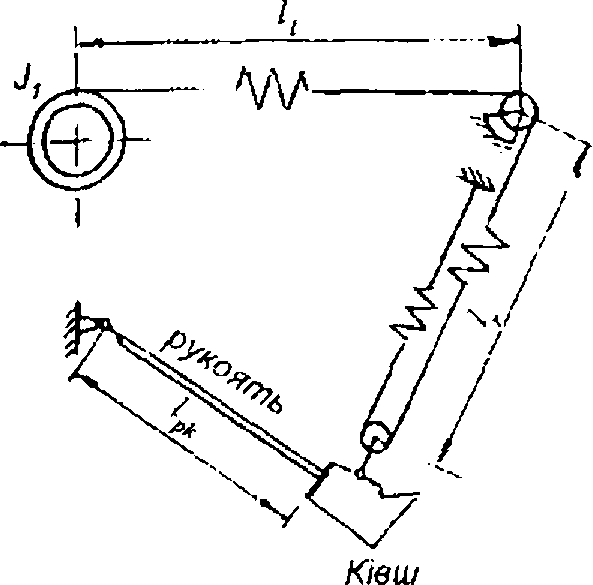
К
= 1.6 м/с; діаметр барабанів D6 = 2.4 м ; діаметр канатів с/к = 60 мм; модуль пружності канату ЕК = 1.05 ,106 кг/см2; довжина канату /2 = 92 м; довжина
канату /, змінюється. Номінальна шви-
•> і
дкість обертання двигуна nv = 26 об/хв; момент інерції двигуна J = 300 кг. м2. Привести що систему підіймального механізму до двомасової моделі та визначити її коефіцієнти й параметри.
* *