

Элементы тригонометрии
Рассмотрим
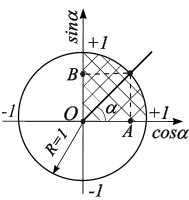
круг единичного радиуса
![]() (рис. 1.7). Длина окружности круга единичного
радиуса равна
(рис. 1.7). Длина окружности круга единичного
радиуса равна
![]() ,
откуда
,
откуда

![]()
|
Рис. 1.7 |
Градусная и радианная мера:
![]() рад.;
рад.;
![]() рад.;
рад.;
1
рад.
![]()
 .
.
Таблица значений тригонометрических функций в смысле главного значения, т. е. в первом квадранте (рис. 1.7).
|
||||||||||||||||||||||||||||||||
Основное тригонометрическое тождество:
Функции двойного угла:
Формулы приведения:
|


Графики тригонометрических функций
При
построении тригонометрических функций
мы используем радианную
меру измерения углов.
Тогда
функция
![]() представляется графиком (рис. 1.8). Эта
кривая называется синусоидой.
представляется графиком (рис. 1.8). Эта
кривая называется синусоидой.
|
Рис. 1.8 |
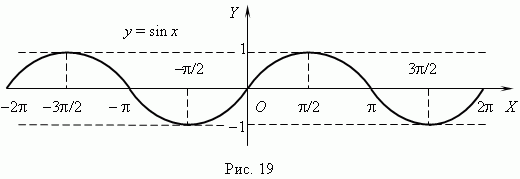
График функции представлен на рис. 1.9; это кривая называется также синусоидой, полученная в результате перемещения графика вдоль оси х влево на /2.
|
Рис 1.9 |

Характеристики и свойства тригонометрических функций:
область
определения:
![]() <
x
<
+
;
область
значений: 1
<
x
<
+
;
область
значений: 1
![]() y
+1;
y
+1;
функции периодические, их период равен 2 ;
функции ограниченные ( | y | 1 ), всюду непрерывные.
Векторы
О
Рис.
1.10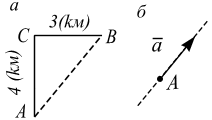
![]() .
Такие величины, как расстояние между
точками и температура, называют
скалярными.
Бывают
обстоятельства, когда необходимо знать
и модуль, и направление физической
величины. Например, если пункт А
находится в 5
(км)
к северо-востоку от пункта В,
то
недостаточно направить студента, указав
расстояние в 5
(км)
для того, чтобы он достиг пункта В.
Необходимо задать направление движения.
Комбинация модуля и направления
физической величины называется векторной
величиной,
или просто вектором.
.
Такие величины, как расстояние между
точками и температура, называют
скалярными.
Бывают
обстоятельства, когда необходимо знать
и модуль, и направление физической
величины. Например, если пункт А
находится в 5
(км)
к северо-востоку от пункта В,
то
недостаточно направить студента, указав
расстояние в 5
(км)
для того, чтобы он достиг пункта В.
Необходимо задать направление движения.
Комбинация модуля и направления
физической величины называется векторной
величиной,
или просто вектором.
Важность
понимания различий между векторными и
скалярными величинами состоит в том,
что для этих величин разные правила
сложения, вычитания и умножения. Для
скалярных величин эти правила прописаны
в алгебре, для векторных величин – в
векторной алгебре. Например, полное
расстояние между пунктами А
и В
(по
траектории движения![]() )
вычисляется
алгебраическим сложением (рис.
1.10, а):
)
вычисляется
алгебраическим сложением (рис.
1.10, а):
![]()
а полное перемещение вычисляется расстоянием между пунктами А и В, которое равно
![]() .
.
Вектор
обозначается буквой с чертой (или
стрелкой) над ней –
![]() (
(![]() )
и изображается направленным отрезком,
длина которого в некотором масштабе
равна модулю представляемой вектором
физической величины
(рис. 1.10, б).
Вектор характеризуется точкой
приложения
(точка А),
модулем
)
и изображается направленным отрезком,
длина которого в некотором масштабе
равна модулю представляемой вектором
физической величины
(рис. 1.10, б).
Вектор характеризуется точкой
приложения
(точка А),
модулем
![]() и линией
действия –
прямой, вдоль которой направлен вектор.
Вектор, модуль которого
и линией
действия –
прямой, вдоль которой направлен вектор.
Вектор, модуль которого
![]() ,
называется единичным
вектором. Если
направление единичного вектора совпадает
с направлением вектора, единичный вектор
называется
ортом. Орты,
направленные по осям
,
называется единичным
вектором. Если
направление единичного вектора совпадает
с направлением вектора, единичный вектор
называется
ортом. Орты,
направленные по осям
![]() ,
декартовой системы координат, обозначаются
,
декартовой системы координат, обозначаются
![]() ,
,
![]() – единичные орты
(рис. 1.11).
– единичные орты
(рис. 1.11).
П
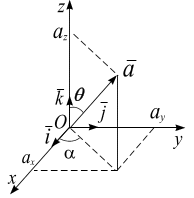 Рис.
1.11
Рис.
1.11![]() (рис. 1.11). Опустим перпендикуляры
из начала А
и конца В
вектора на оси
,
,
(рис. 1.11). Опустим перпендикуляры
из начала А
и конца В
вектора на оси
,
,
![]() получим отрезки
получим отрезки
![]() ,
,
![]() ,
,
![]() называемые проекциями вектора
на оси
,
называемые проекциями вектора
на оси
,
![]() .
.
Каждый
вектор
![]() может быть
единственным
образом разложен на сумму векторов,
параллельных единичным ортам
плоской системы:
может быть
единственным
образом разложен на сумму векторов,
параллельных единичным ортам
плоской системы:
![]() . (а)
. (а)
Скаляры
![]() ,
,![]() называются координатами вектора
в системе
называются координатами вектора
в системе
![]() и обозначается это так:
и обозначается это так:
![]() . (
б)
. (
б)
Записи (а) и (б) равносильны.
Координаты вектора , и модуль вычисляются по формулам:
![]() ,
,
![]()
Проекция вектора на ось есть скалярная величина, равная произведению модуля проектируемого вектора на косинус угла между положительным направлениями оси и направлением вектора (рис. 1.12):
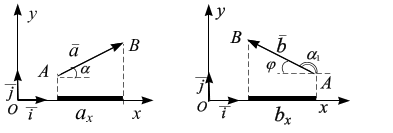
Рис. 1.12
![]()
![]() .
.
Линейные
комбинации векторов. Сложение
векторных величин производится по
правилу параллелограмма: сумма двух
векторов
и
![]() ,
приведенных к общему началу, есть третий
вектор
,
приведенных к общему началу, есть третий
вектор
![]() ,
длина которого равна длине параллелограмма,
построенного на векторах
и
,
а направлен вектор
от точки A
к точке B
(рис. 1.13):
,
длина которого равна длине параллелограмма,
построенного на векторах
и
,
а направлен вектор
от точки A
к точке B
(рис. 1.13):
![]() .
.
Рис. 1.13 |
Модуль
вектора
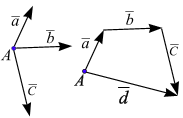
Силовой многоугольник. Суммируют несколько векторов построением векторного многоугольника. Слагаемые векторы путем параллельного переноса последовательно при- |
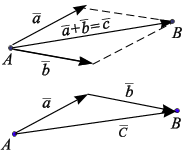
страивают
один за другим так, что начало последующего
вектора совпадает с концом предыдущего,
тогда вектор,
замыкающий полученный многоугольник,
является суммой заданных слагаемых,
причём его начало совпадает с началом
первого из слагаемых векторов, а конец
– с концом последнего (рис. 1.14, а).
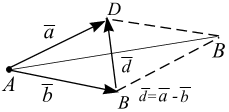
Разность двух векторов.
Разностью векторов (![]() )
называется вектор
)
называется вектор
![]() (диагональ BD)
такой, что сумма векторов
(диагональ BD)
такой, что сумма векторов
![]() (рис. 1.14, б)
(рис. 1.14, б)
![]() .
.
|
|
|
а |
б |
в |
Рис. 1.14 |
||
Скалярное
умножение векторов. Скалярным
умножением векторов
и
![]() (обозначается
(обозначается
![]() )
называется скаляр, определяемый
равенством
)
называется скаляр, определяемый
равенством
![]() ,
,
где угол – угол между векторами и , приведенными к общему началу (рис. 1.14, в).
Если
заданы векторы
![]() и
и
![]() ,
то скалярное произведение векторов
вычисляется по формуле
,
то скалярное произведение векторов
вычисляется по формуле
![]() .
.
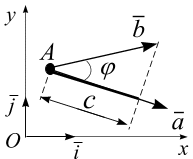
Радиус-вектор.
Положение
точки А
в пространстве удобно характеризовать
радиус-вектором.
Если каждому значению скалярного
аргумента t
поставить
в соответствие вектор
Рис.
1.15![]() (расстояние между точкой
(расстояние между точкой
![]() и полюсом О
фиксируется модулем
и полюсом О
фиксируется модулем
![]() ,
направление
фиксируется углом
,
направление
фиксируется углом
![]() (рис.1.15)),
то функция
будет называться радиус-вектором
скалярного аргумента. Если начало
вектора
(радиус-вектора) поместить в произв
(рис.1.15)),
то функция
будет называться радиус-вектором
скалярного аргумента. Если начало
вектора
(радиус-вектора) поместить в произв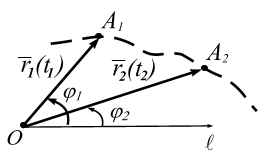
![]() разложить по базисным векторам
разложить по базисным векторам
![]() ,
,
![]() ,
прямоугольной системы координат, то
,
прямоугольной системы координат, то
![]() ,
,
причем
компоненты
![]() являются координатами точки А
в прямоугольной системе координат
(рис.1.16, а).
являются координатами точки А
в прямоугольной системе координат
(рис.1.16, а).
|
|
а |
б |
Рис. 1.16 |
|
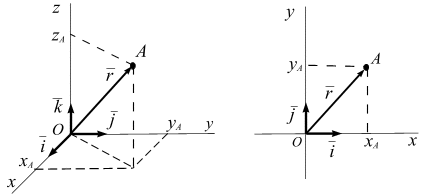
В плоской прямоугольной системе координат (рис.1.16, б) радиус-вектор раскладывается по базисным векторам , так:
![]() .
.