

Лабораторная работа №. 3 – 1.. Б-206.
Определение момента инерции твердого тела методом колебаний
Цель работа: используя закон сохранения механической энергии и уравнение гармонических колебаний /незатухающих/, определить момент инерции махового колеса.
Оборудование и принадлежности: маховое колесо на горизонтальной оси, вспомогательный шарик, штангенциркуль, линейка, секундомер, кубик.
А. Основные понятия.
1. Поступательное и вращательное движения.
Поступательное движение — это движение, при котором любая прямая, жестко связанная с движущимся телом, остается параллельной своему первоначальному положению.
Вращательное движение - это движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения. Уравнения, характеризующие изменения координат (как линейных, так и угловых), называются кинематическим уравнениями движения.
2. Скорость.
Скоростью движения тела является вектор, характеризующий величину изменения координат тела с течением времени и направление этого изменения.
v = lim<v> = lim Dr/Dt = dr/dt.
Dt®0 Dt®0
3. Ускорение
Ускорение — это вектор, характеризующий изменение величины и направления скорости с течением времени.
a = lim<a> = limDv/Dt = dv/dt = d2r/dt2,
Dt®0 Dt®0
При криволинейном движении вектор полного ускорения целесообразно разложить по двум составляющим — тангенциальному ускорению at , направленному по касательной к траектории в сторону изменения скорости, и перпендикулярному ему нормальному (центростремительному) ускорению an , направленному по радиусу к центру траектории.
Полное ускорение будет геометрической суммой тангенциальной и нормальной составляющих a = at + an.
Тангенциальное ускорение отвечает за изменение модуля скорости, а нормальное ускорение — за изменение направления скорости.
4.Уравнения движения.
1) равномерное прямолинейное движение:
a = at = an = 0; v = const. s = vt.
2) равноускоренное прямо линейное движение:
an = 0; a = at = const. v = v0 + at;
s = s0 + v0t + at2/2,
3) равномерное движение по окружности:
a = an = const. at = 0; v = const;
v = 2pR/T; an= v2/R = (2pR)2/RT2 = (4p2R)/T2
4) равноускоренное движении по окружности
at = dv/dt = R.dw/dt = Re; an = v2/R = w2R;
a2 = at2 + an2 = (dv/dt)2 + (v2/R)2 = R(e2 + w2).
5. УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ.
При криволинейном движении удобнее использовать вместо линейных характеристик движения угловые:
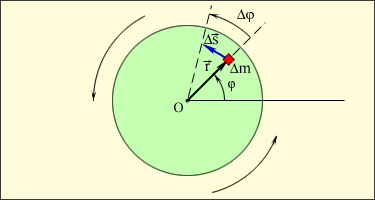
а) угловое перемещение Dj, т.е. разница угловых координат начального и конечного положения точек,
б) угловую скорость w, т.е. изменение величины угла с течением времени (или первой производной от углового перемещения по времени),
в) угловое ускорение e, т.е. изменение величины угловой скорости с течением времени (или первой производной от угловой скорости по времени или второй производной от угла по времени).
|
Рисунок 2-3-1. Вращение диска относительно оси, проходящей через его центр O. |
w = lim(Dj/Dt) = dj/dt
Dt®0
w направлена вдоль оси вращения по правилу правого винта.
Векторы, связанные с направлениями осей вращения, называются псевдо-векторами, и не имеют определенных точек приложения.
Если w = const, то вращение равномерное и характеризуется
периодом вращения T — временем, за которое точка совершает один полный оборот, т.е. поворачивается на угол 2p. Так как промежутку времени Dt = T соответствует Dj=2p, то w=2p/T, откуда T = 2p/w.
Число полных оборотов, совершаемых при равномерном вращении, называется частотой вращения: n = 1/T = w/2p, откуда w = 2pn.
Вектор углового ускорения направлен так же по оси вращения. Тангенциальная составляющая ускорения at=dv/dt; v=wR и at=d(wR)/dt=Rdw/dt=Re.
Нормальная составляющая ускорения an = v2/R = w2R.
Таким образом, связь между линейными и угловыми величинами выражается следующими формулами:
s = Rj.
v = Rw,
at = Re,
an = Rw2.
При равноускоренном движении по окружности все виды ускорений отличны от нуля, только
at = const.
w = w0 + et;
j = j0 + w0t + (et2)/2.
Для частного случая криволинейного движения — движения по окружности радиуса R, угловые характеристики движения связаны с линейными характеристиками весьма просто:
Dj = Ds/R;
w = dj/dt = v/R;
e = dw/dt = d2j/dt2 = a/R.