

5. Принципиальные и кинематические схемы инерциальных датчиков
С хема
динамически настраиваемого гироскопа-датчика
угловой скорости
хема
динамически настраиваемого гироскопа-датчика
угловой скорости

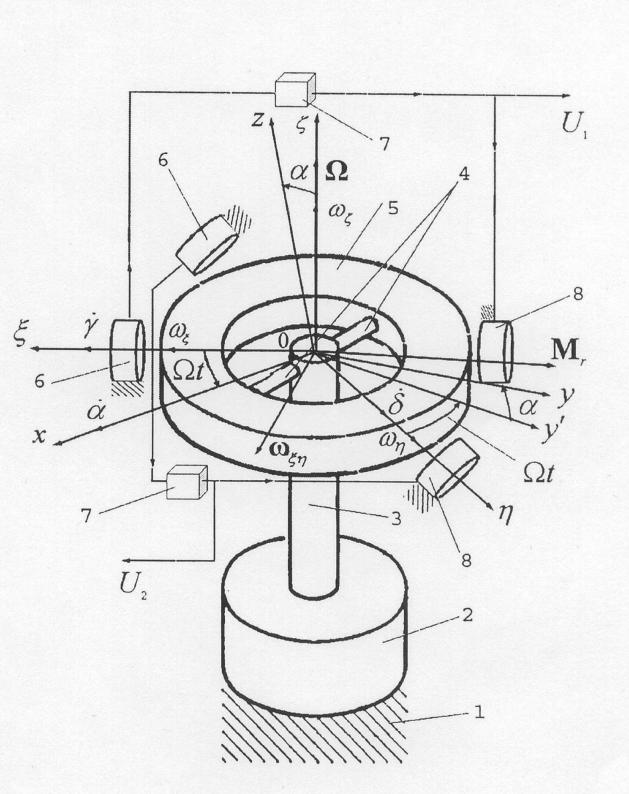
Схема роторного вибрационного гироскопа-датчика угловой скорости

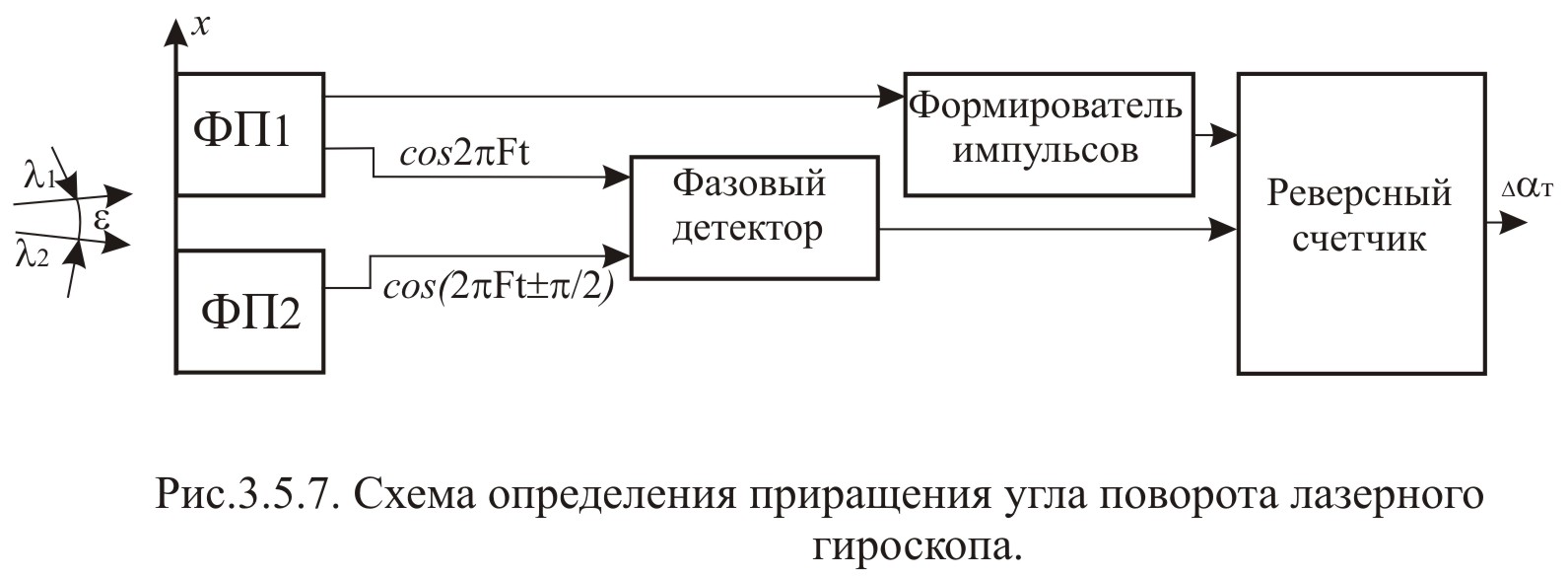
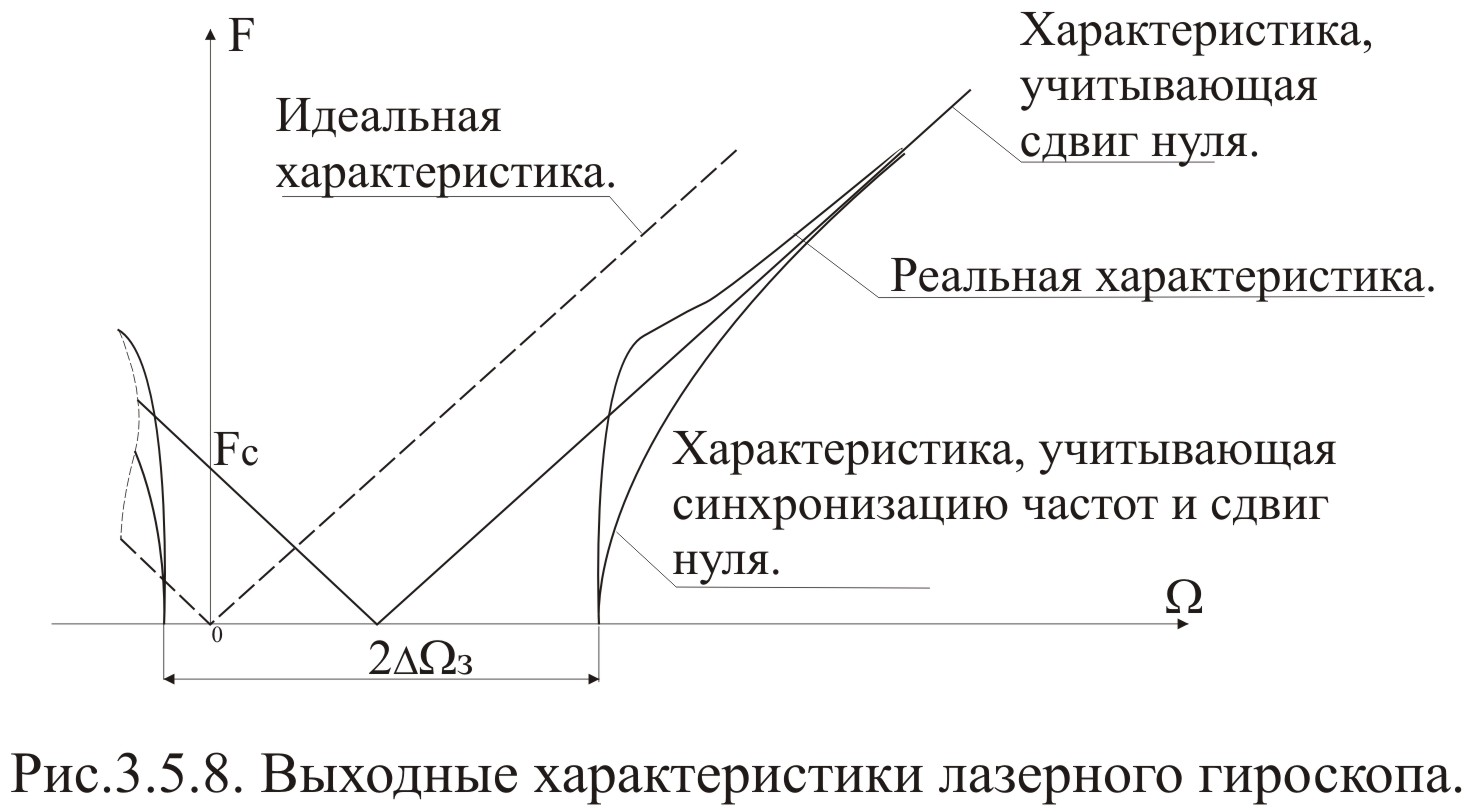
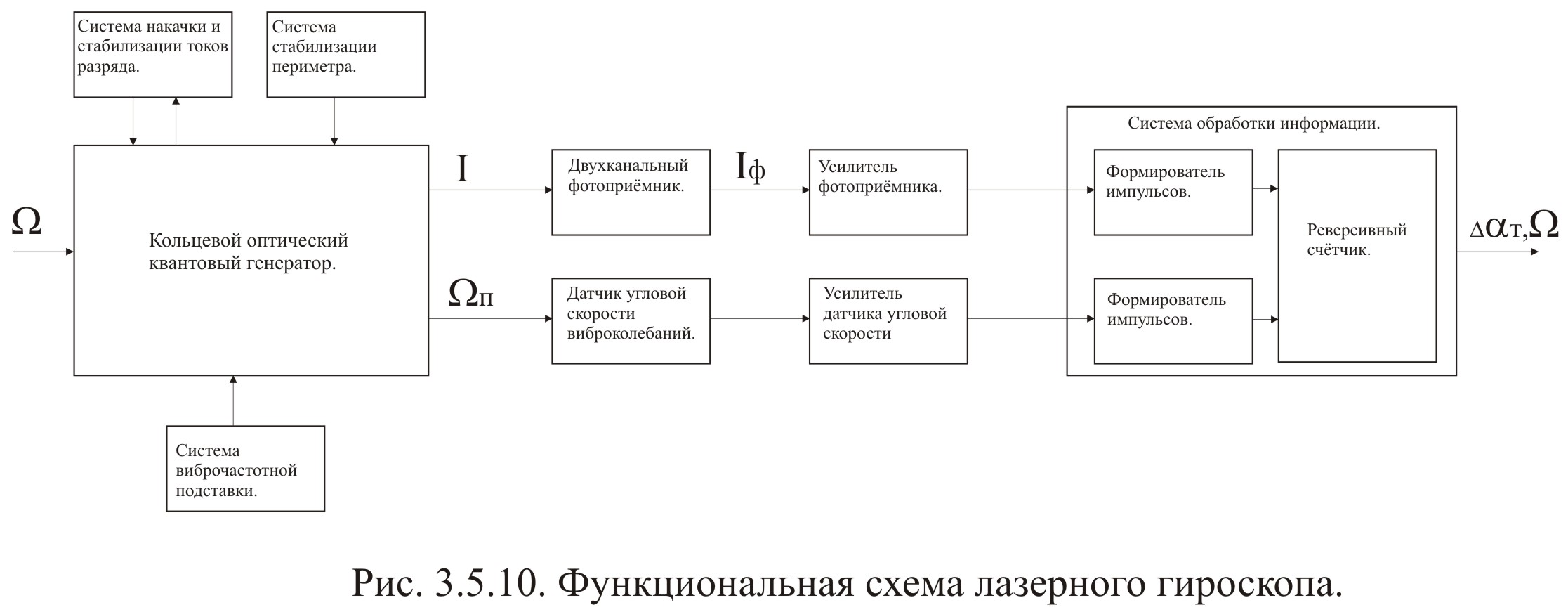
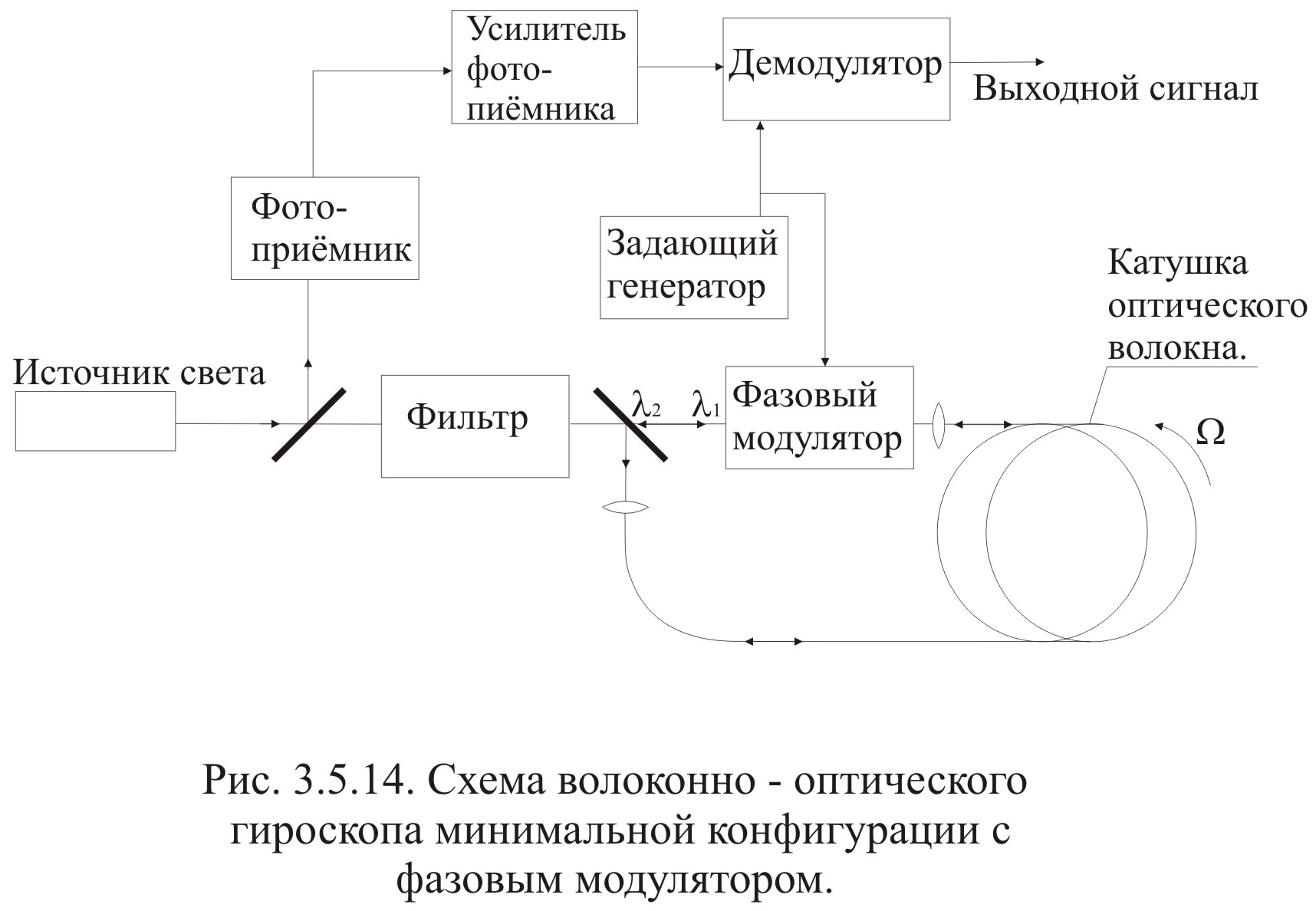
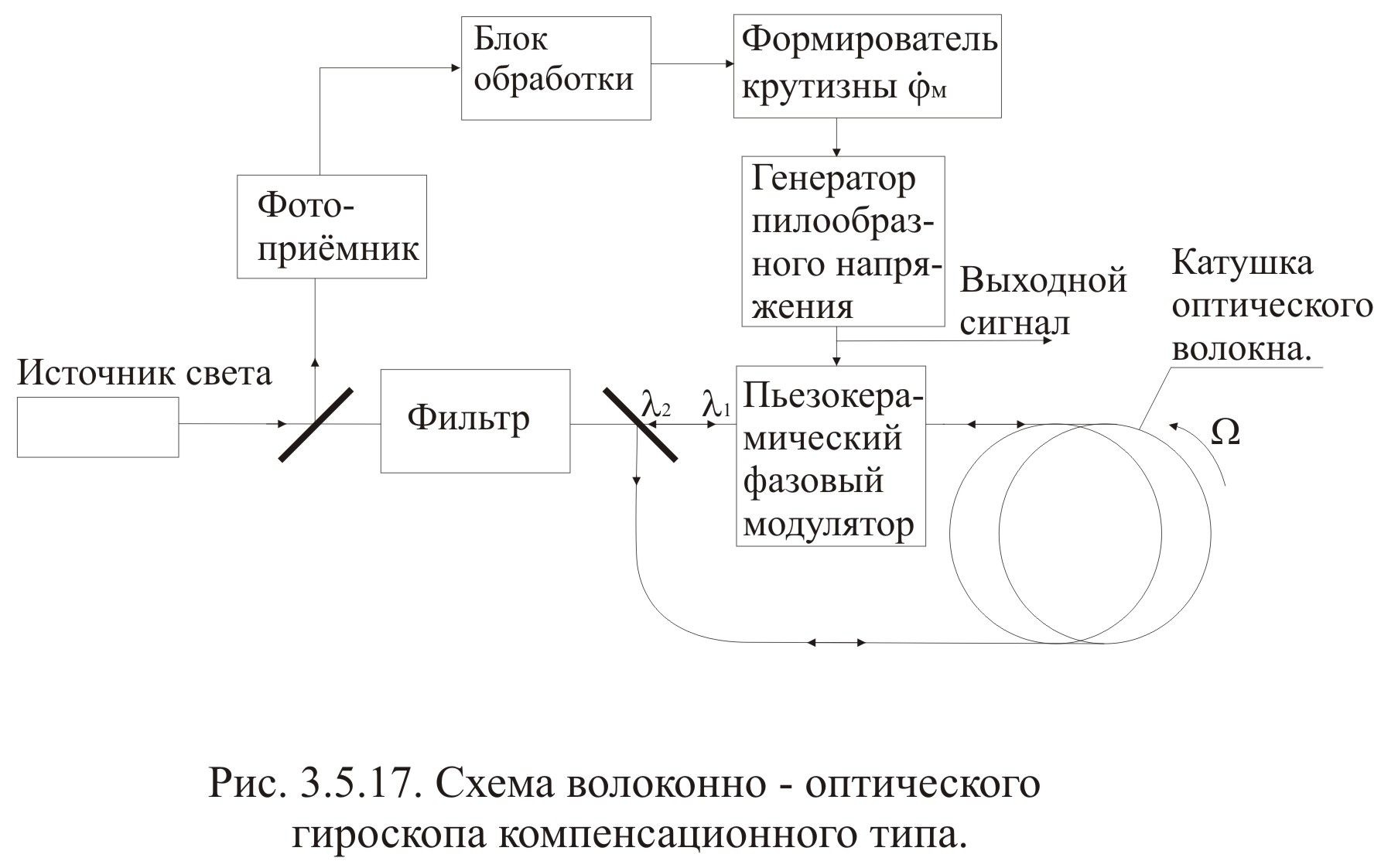
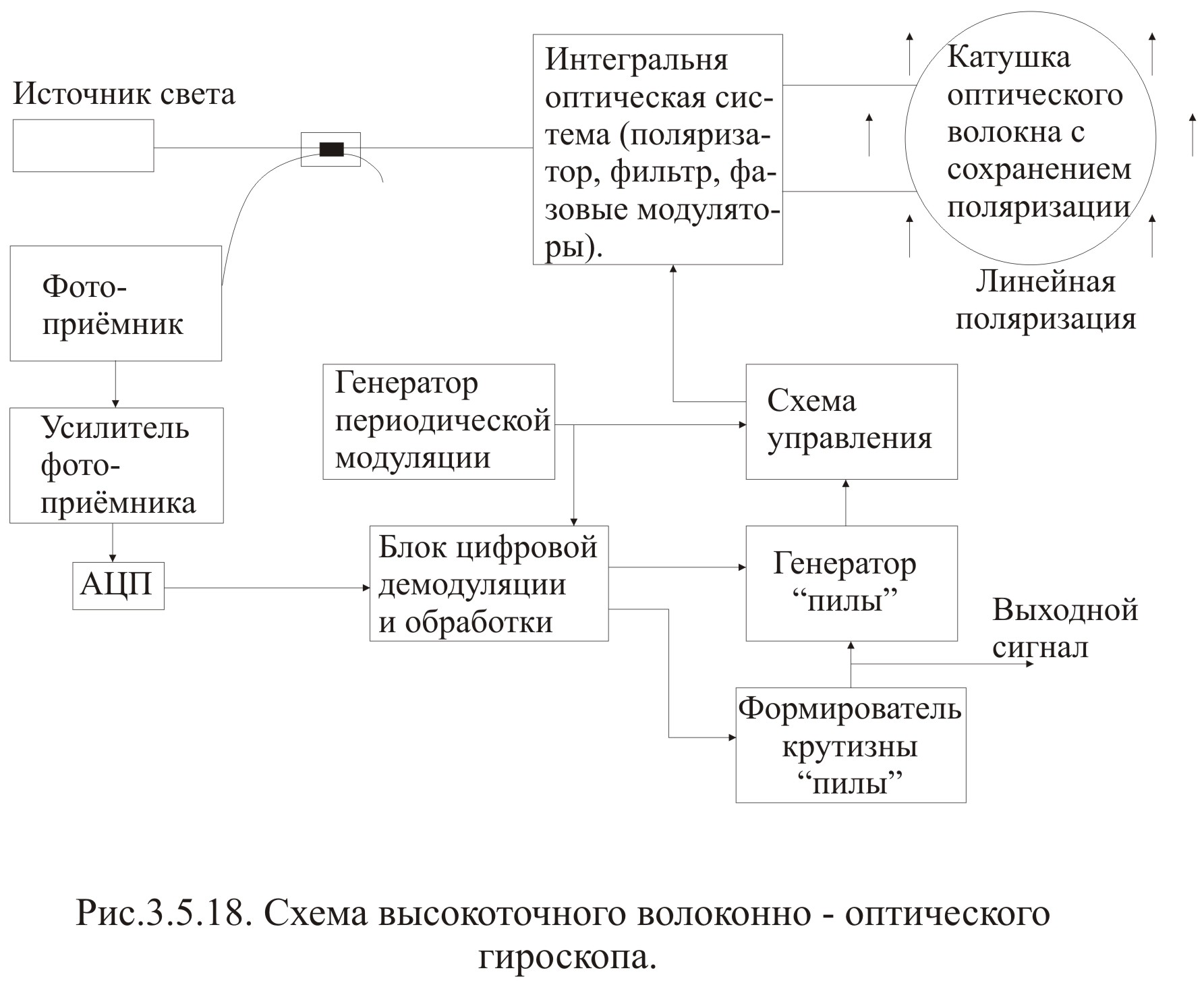
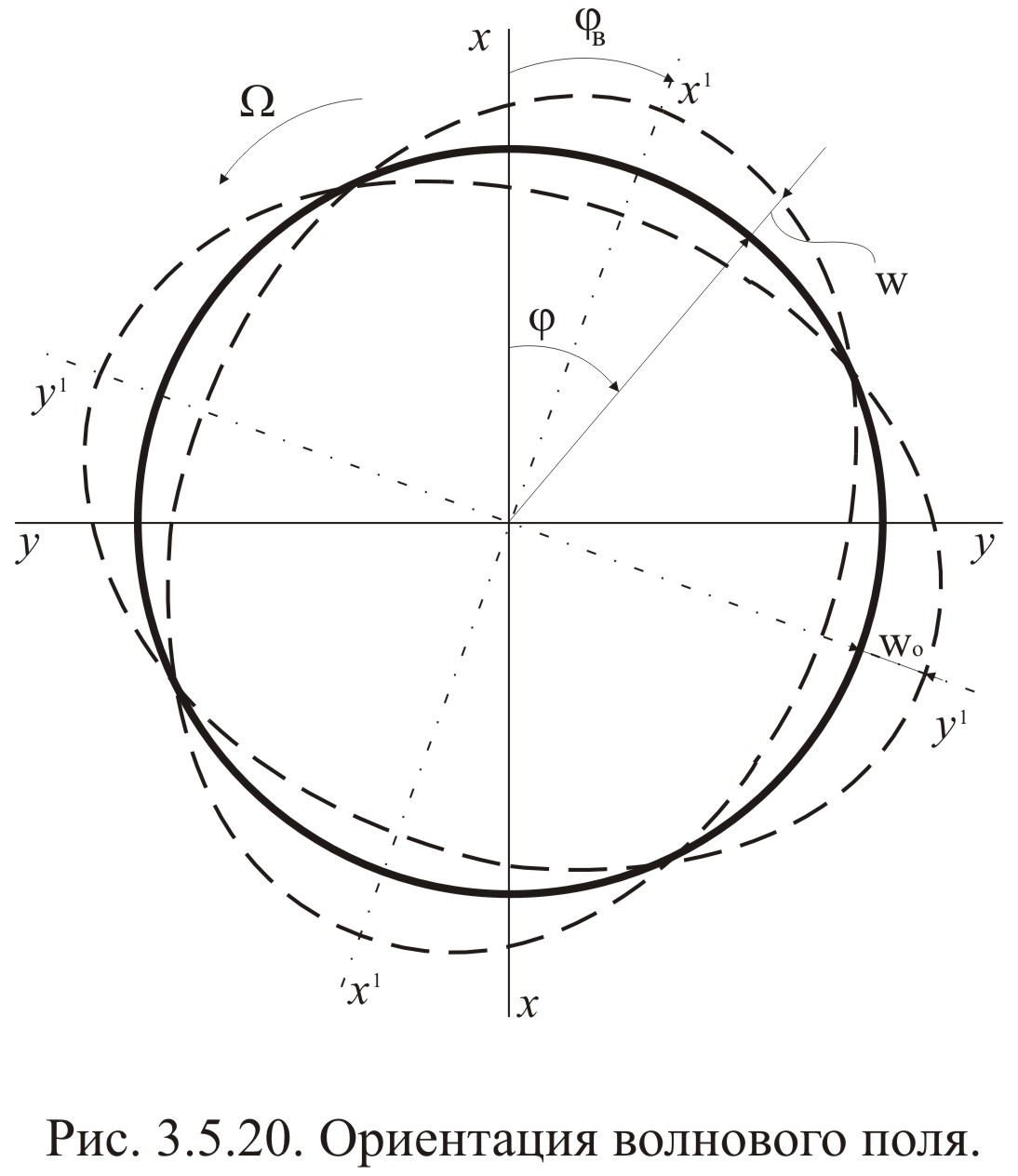
Схема кольцевого оптического квантового генератора
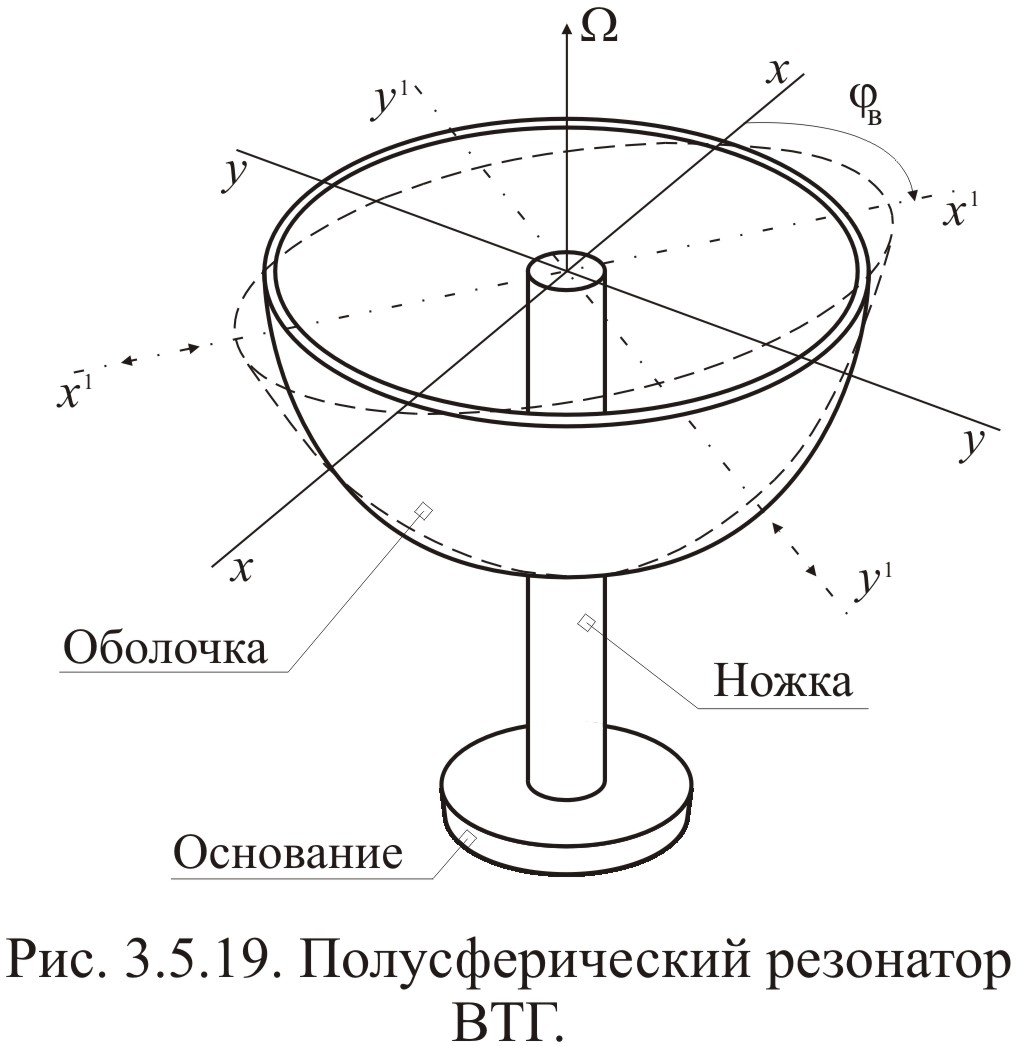

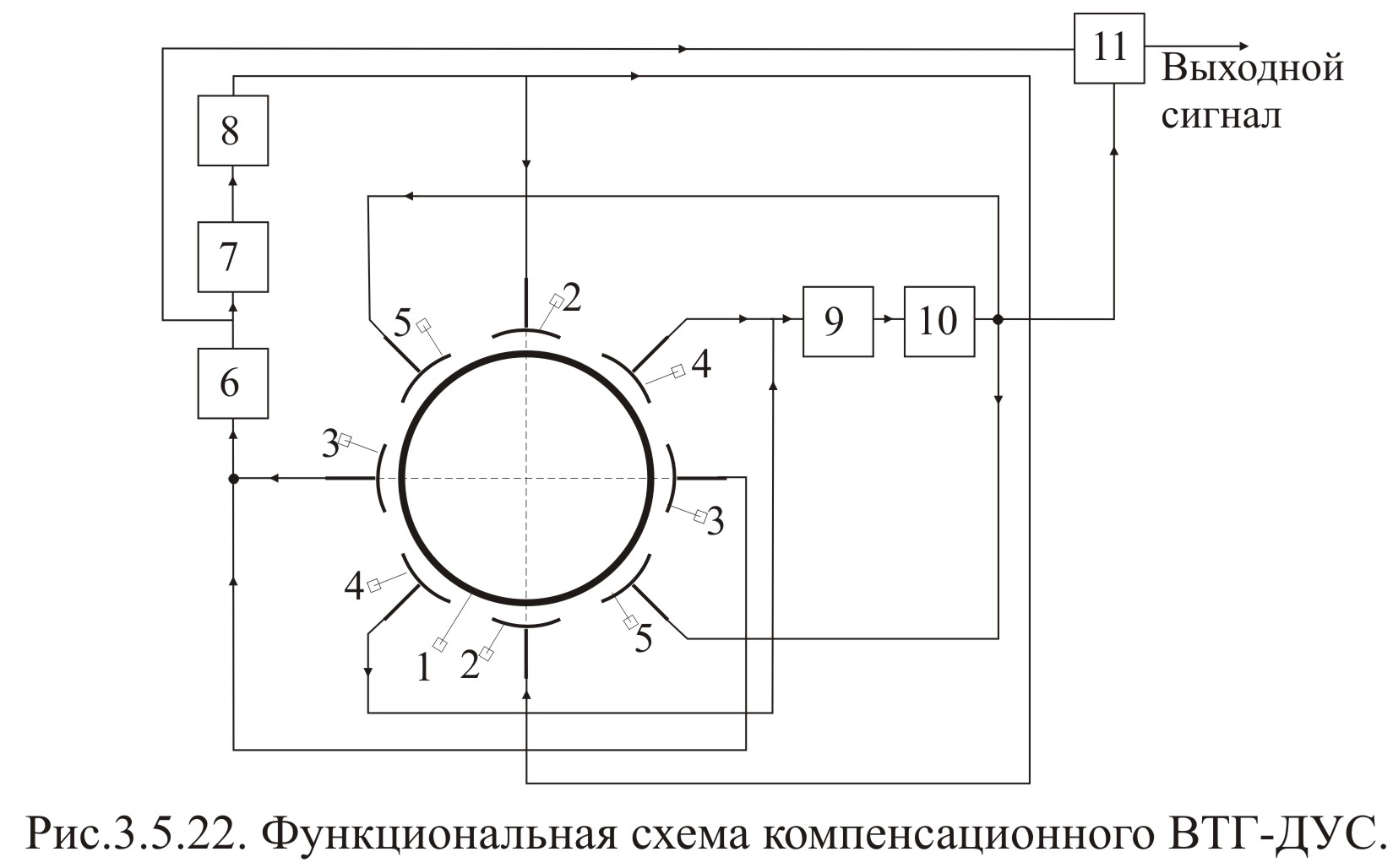

Конструктивная схема ВТГ
Функциональная схема интегрирующего волнового твердотельного гироскопа
Принцип работы ММГ.
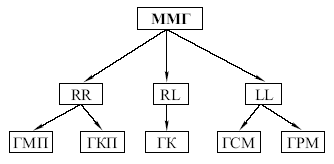
Классификация типов микромеханических вибрационных гироскопов
 Конструкция
микромеханического гироскопа RL-типа
Конструкция
микромеханического гироскопа RL-типа

ММГ с внешним упругим карданным подвесом.
Конструкция ММГ с внешним упругим карданным подвесом
ММГ с внешним упругим кардановым подвесом.
ММГ LL-типа с сосредоточенной массой

ММГ компании Analog Devices.


Основные компоненты конструкции ММГ с КР
Блок-схема ММГ с КР
Схема ММГ RL-типа
Схема ММГ LL-типа с сосредоточенной массой
Электронная плата ММГ RR-типа.
ММГ:
Δ![]() Hii
шK/K
Hii
шK/K
ММА: Δа а Hаi аi ашKа/Kаа
Модели погрешностей ММГ и ММА
Погрешности микромеханических гироскопов
5. Краткая теория датчиков первичной информации инерциальных навигационных систем
5.2. Динамически настраиваемые гироскопы
ДНГ относятся к классу роторных вибрационных гироскопов с упругим подвесом носителя кинетического момента, в которых возможна реализация резонансной или динамической подстройки, в значительной мере освобождающей ротор от упругой связи с основанием. Исторически ДНГ в качестве ИЧЭ в большой степени пришли на смену поплавковым гироскопам, по сравнению с которыми ДНГ обладают рядом достоинств. Это малые массогабаритные характеристики и энергопотребление; более высокие надежность и технологичность конструкции; стабильность основных параметров; более низкий уровень шумов; малое время готовности; меньшая стоимость.
Принципы построения разнообразных ДНГ, их теория и конструктивные решения представлены, например, в [5.2…5.7]. Рассмотрим здесь два характерных типа ДНГ, один из которых - двухстепенный РВГ относится к гироскопам низкой точности и может использоваться в БИНС на подвижных объектах с коротким сроком жизни, другой – трехстепенный ДНГ с внутренним двухколечным подвесом ротора относится к группе гироскопов средней и высокой точности и может использоваться в высокоточных БИНС на подвижных объектах дальнего действия.