

7.Пример решения уравнения теплопроводности.
Используя метод
сеток, решим уравнение теплопроводности
![]() при заданных начальных условиях:
u(x;0)=3x(1-x)+0.12;
при заданных начальных условиях:
u(x;0)=3x(1-x)+0.12;
u(0; t)=2(t+0.06); u(0.6; t)=0.84,
где х![]() [0;
0.6].
[0;
0.6].
Решение будем
находить при h=0,1
для t
[0;
0.01] c
четырьмя десятичными знаками, считая
![]() .
.
Решение:
В командном окне программы МАТLAB наберем следующую последовательность операторов:
>> h=0.1; s=1/6;
>> k=h^2*s
k =0.0017
>> Nx=0.6/h+1 % число узлов координатной сетки
Nx =7.0000
>> Nt=0.01/k+1 % число шагов по времени
Nt = 7.0000
>> for i=1:Nx+1 % задание пространственно-временной сетки
x(i)=(i-1)*h;
end;
>> x
x = 0 0.1000 0.2000 0.3000 0.4000 0.5000 0.6000
>> for i=1: Nt+1
t(i)=(i-1)*k;
end;
>> t
t = 0 0.0017 0.0033 0.0050 0.0067 0.0083 0.0100
% задание начальных и граничных условий
>> for i=1: Nx+1
tab (1,i) = (3*x(i)*(1-x(i)))+0.12;
end;
>> for j=1: Nt+1
tab (j,1)=2*(t(j)+0.06);
tab (j,7)=0.84;
end;
% матрица краевых условий
>> tab
tab =0.1200 0.3900 0.6000 0.7500 0.8400 0.8700 0.8400
0.1233 0 0 0 0 0 0.8400
0.1267 0 0 0 0 0 0.8400
0.1300 0 0 0 0 0 0.8400
0.1333 0 0 0 0 0 0.8400
0.1367 0 0 0 0 0 0.8400
0.1400 0 0 0 0 0 0.8400
% заполнение оставшейся части матрицы
>> for j=2:Nt+1
for i=2:Nx
tab(j,i)=1/6*(tab(j-1,i-1)+4*tab(j-1,i)+tab(j-1,i+1));
end;
end;
>> tab
tab =0.1200 0.3900 0.6000 0.7500 0.8400 0.8700 0.8400
0.1233 0.3800 0.5900 0.7400 0.8300 0.8600 0.8400
0.1267 0.3722 0.5800 0.7300 0.8200 0.8517 0.8400
0.1300 0.3659 0.5704 0.7200 0.8103 0.8444 0.8400
0.1333 0.3607 0.5612 0.7101 0.8009 0.8380 0.8400
0.1367 0.3562 0.5526 0.7004 0.7920 0.8322 0.8400
0.1400 0.3524 0.5445 0.6911 0.7834 0.8268 0.8400
% визуализация численного решения (рис 3.30)
>> surf(tab)
Т К
Y
X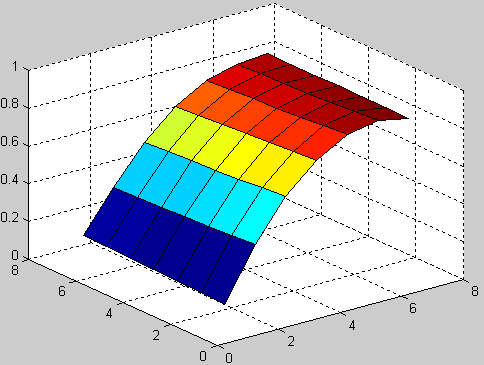
Рис. 3.34. Графическое решение уравнения теплопроводности
8. Пример решения уравнений гиперболического вида
В этом примере рассмотрим расчет колебании тонкой пластины квадратной формы (рис. 3.13), описываемые обобщенным гиперболическим уравнением вида
![]()
Будем считать, что пластина жестко закреплена на левой и правой границах - u = 0, а два других ее края свободны - дu/дп = 0.
Расчет с помощью PDETool будем проводить в следующем порядке. Вначале установим вид расчета "Generic Scalar" в окне "Application" (этот режим выбран по умолчанию).
Начертим изображение пластины в графическом окне PDETool таким образом, чтобы ее центр совпал с началом координат (x = 0, у = 0) и стороны были равны, а = b = 2, где а - размер по оси x, b-размер по оси y (см. рис. 3.13).
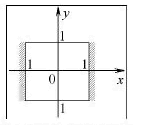
Рис. 3.13. Модель пластины
Будем задавать граничное условие Дирихле и = 0 на левой и правой сторонах. На двух других сторонах примем условие Неймана дu/дп = 0.
Укажем, что задача описывается уравнением гиперболического типа, и введем соответствующие коэффициенты с = 1, а = 0, f = 0. d = 1 (рис. 3.13).
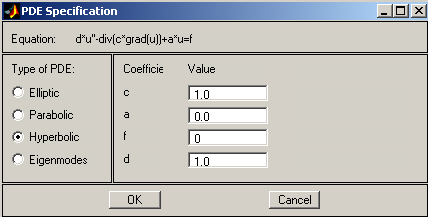
Рис. 3.14. Ввод параметров дифференциального уравнения
Зададим параметры решения и начальные условия - исходную деформацию пластины при t = 0:
![]()
Для этого воспользуемся диалоговым окном "Solve Parameters", которое можно открыть, выбрав пункты меню Solve—> Parameters... (рис. 3.15).
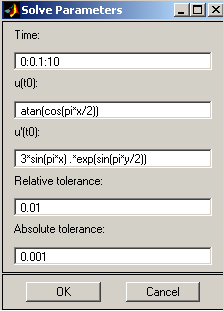
Рис. 3.15. Ввод параметров решения
Вначале
выберем шаг, и верхний предел решения
по времени. Для параметра Time
введем строку "0:0.1:10". Таким образом,
расчет будет выполняться по времени
в пределах ; = 0...10 с шагом
![]() t=0,1.
t=0,1.
Начальные условия также записываются с учетом особенностей языка пакета MATLAB.
Начальная деформация указывается строкой
"atan(cos(pi*x/2))",
а первая производная
"3*sin(pi*x) .*exp(sin(pi*y/2))".
Относительную и абсолютную погрешность примем равными 0,01 и 0,001. сохранив установленные по умолчанию значения.
Сформируем сетку и настроим графические параметры решения с помощью диалогового окна "Plot Selection" (рис. 3.16).

Рис. 3.16. Параметры анимации
Завершающий этап - запуск решения задачи. После окончания вычислений в графическом окне интерфейса PDETool отображается деформация пластины в момент времени t = 10, а в дополнительном окне - анимация колебаний пластины (рис. 3.17).
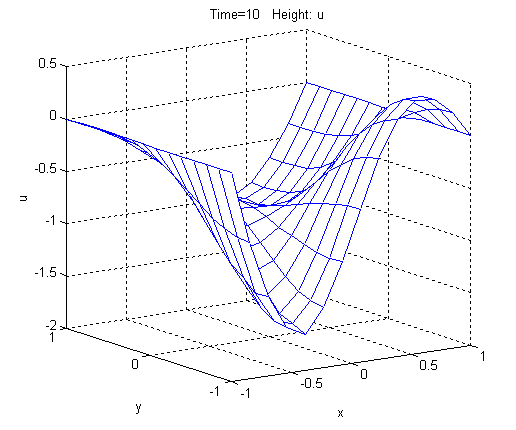
Рис. 3.17. Анимация решения гиперболического уравнения