

Частные случаи пространственных систем сил. Центр параллельных сил
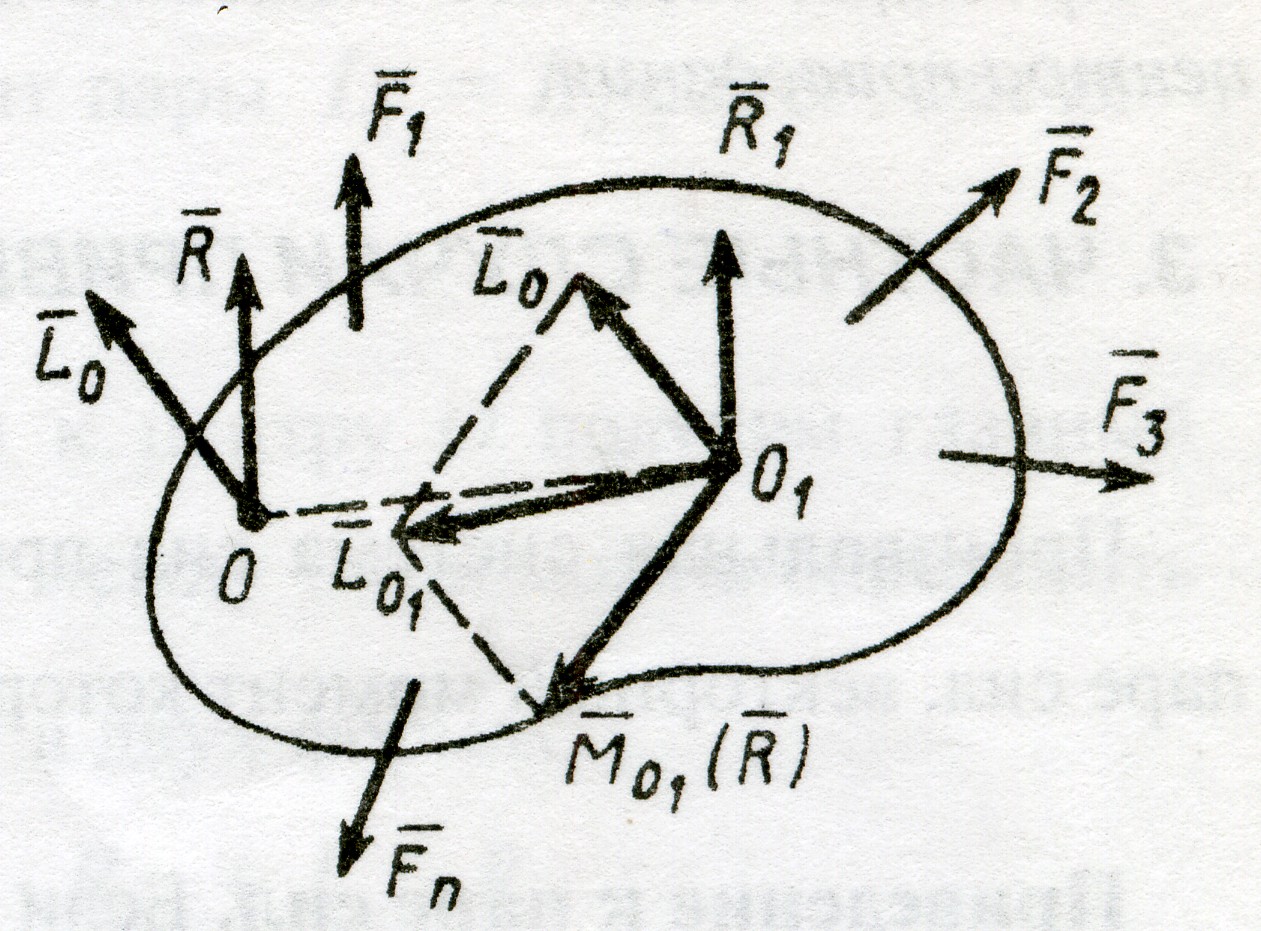
Изменение главного момента при перемене центра приведения
Пусть система сил приведена
к центру O и
получены в этой точке вектор
и главный момент
![]() (рис. 24). Выберем в
качестве цента приведения другую точку
и вычислим момент рассматриваемой
системы сил.
(рис. 24). Выберем в
качестве цента приведения другую точку
и вычислим момент рассматриваемой
системы сил.
Силу
из
![]() точки
перенесем в точку
.
Получим в этой точке силу
точки
перенесем в точку
.
Получим в этой точке силу
![]() и,
согласно теореме о параллельном переносе
силы, присоединенную пару сил с векторным
моментом
и,
согласно теореме о параллельном переносе
силы, присоединенную пару сил с векторным
моментом
![]() .
.
Векторный момент пары сил , вычисленный относительно точки как вектор свободный, можно приложить в любой точке тела. Перенесем в точку
![]()
![]()
По формуле для векторного момента силы имеем
![]()
С учетом этого формула примет вид
![]()
Итак, момент системы сил при перемене центра приведения изменяется на векторный момент главного вектора , приложенного старом центре приведения, относительно нового центра приведения .
Инвариантные системы сил
Инвариантами
в статике называются
такие величины для рассматриваемой
системы сил, которые не изменяются при
изменении центра приведения.
Одним из инвариантов
является главный вектор
![]()
Главный вектор системы сил является векторным инвариантом. Для получения второго, скалярного, инварианта используем
![]()
Умножая обе части этого
равенства скалярно на
![]() ,
причем в правой части при умножении
вместо
,
возьмем
,получим
,
причем в правой части при умножении
вместо
,
возьмем
,получим
![]() или
или
![]() так как
так как
![]()
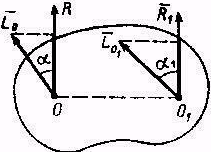
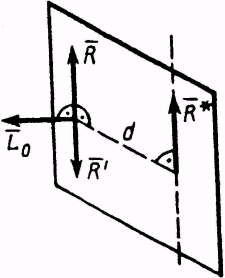
Скалярное произведение главного момента на главный вектор не зависит от центра приведения. Второй инвариант можно выразить в формуле:
![]()
![]()
где
![]() -угол
между векторами
-угол
между векторами
![]() и
,
а
и
,
а
![]() -между
и
-между
и
![]() (рис.
25). После сокращения на
получим
(рис.
25). После сокращения на
получим
![]()
Проекция главного момента на направление главного вектора не зависит от центра приведения.
Частные случаи приведения пространственной системы сил
Произвольная система сил приводится к силе, равной главному вектору , и паре сил, векторный момент которой равен главному моменту .
Приведение к паре
сил. Если
![]() ,
то система сил приводится к одной паре
сил, причем главный момент в этом случае,
не зависит от выбора центра приведения.
В рассматриваемом случаи оба инварианта
системы сил равны нулю, т.е.
,
то система сил приводится к одной паре
сил, причем главный момент в этом случае,
не зависит от выбора центра приведения.
В рассматриваемом случаи оба инварианта
системы сил равны нулю, т.е.
![]()
Приведение к равнодействующей. Возможны два случая:
Если
 (первый инвариант
(первый инвариант
 ,
второй
,
второй
 ),то система приводится к равнодействующей
силе
),то система приводится к равнодействующей
силе
 ,
равной по модулю и направлению главному
вектору
,
т. е.
=
,
равной по модулю и направлению главному
вектору
,
т. е.
=
,
 ,но
,но
 ,т.е.
,т.е.
 (первый инвариант
,
второй
),
то система сил тоже приводится к
равнодействующей, причем опять
=
(первый инвариант
,
второй
),
то система сил тоже приводится к
равнодействующей, причем опять
=
Но линия действия равнодействующей
силы
отстоит
от центра приведения на расстоянии
![]() (рис. 26)
(рис. 26)
![]()
П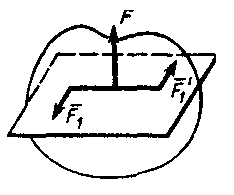 риведение
к динаме. Динамой в
механике называют такую совокупность
силы
и пары сил (
риведение
к динаме. Динамой в
механике называют такую совокупность
силы
и пары сил (![]() )
действующих на твердое
тело, у которой сила перпендикулярна
плоскости действия пары сил (рис 27).
Используя векторный момент
)
действующих на твердое
тело, у которой сила перпендикулярна
плоскости действия пары сил (рис 27).
Используя векторный момент
![]() пары
сил
,
можно
также определить
динаму
как совокупность
силы и пары, у которы сила параллельна
векторному моменту пары сил
пары
сил
,
можно
также определить
динаму
как совокупность
силы и пары, у которы сила параллельна
векторному моменту пары сил
Р![]() ассмотрим
теперь случай, в котором
ассмотрим
теперь случай, в котором
![]() и векторы
и векторы
![]() не
перпендикулярны. В этом
случае
оба инварианта
не равны нулю, т. е.
не
перпендикулярны. В этом
случае
оба инварианта
не равны нулю, т. е.
![]()
![]()
Покажем, что система сил
в этом случае приводится к динаме,
причем элементами
динамы являются сила
![]() и
момент пары L1,
= Lo
COS
α,
где α - угол
между векторами
и
момент пары L1,
= Lo
COS
α,
где α - угол
между векторами
![]()
Действительно,
после приведения системы сил к центру
О
получим
главный вектор R
и
главный момент
![]() .
Косинус
утла а
между
ними можно определить выражая
скалярное произведение векторов
в
двух формах:
.
Косинус
утла а
между
ними можно определить выражая
скалярное произведение векторов
в
двух формах:
![]()
![]()
I
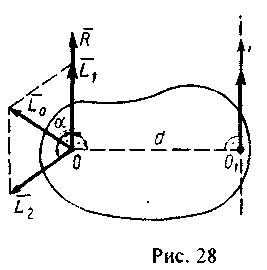
Разложим
главный момент
![]() на две
взаимно перпендикулярные
составляющие
на две
взаимно перпендикулярные
составляющие
![]() и
и
![]() ,
одна
из
,
одна
из
которых направлена по главному вектору (рис 28). Имеем
![]()
![]()
Векторный момент пары сил перпендикулярен главному вектору . Такая система силы и пары с моментом приведется к одной силе , линия действия которой находится от точки О на расстоянии I
![]()
Рассматриваемая система сил заменилась эквивалентной системой сил. I
состоящей из силы и пары сил с векторным моментом , который как свободный вектор можно перенести из точки О в любую точку, в том числе и в точку О1 на линии действия силы . To есть
![]()
причем система сил
![]() является
динамой. Сила и
векторный момент пары
является
динамой. Сила и
векторный момент пары
![]() есть элементы динамы:
есть элементы динамы:
Линия, по которой направлена сила динамы, , называется центральной винтовой осью. Во всех точках винтовой оси, принятых за центры приведения, система сил приводится к одной и той же динаме. Расстояние от центра приведения О до центральной винтовой оси
![]()
Если брать за центры приведения точки на поверхности цилиндра, осью которого является центральная винтовая ось, то главные моменты относительно таких центров будут одинаковы по модулю и составляют одинаковый угол с образующими цилиндра. Эти главные моменты состоят из одного и того же момента входящего в состав динамы, и моментов перпендикулярных и по числовой величине пропорциональных расстоянию центра приведения от центральной винтовой оси.
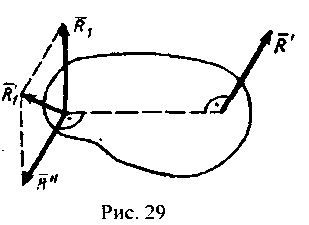
Совокупность
сил, образующих динаму, можно
заменить двумя скрещивающимися
силами. Для этого следует одну из сил
пары
![]() совместить с точкой
приложения силы
и сложить с этой силой
(рис. 29).
совместить с точкой
приложения силы
и сложить с этой силой
(рис. 29).
Рассмотрены
все возможные случаи, кроме случая
равновесия системы сил (![]() ),
рассмотренного ранее. Таким образом,
убедились, что только при обращении в
нуль главного вектора и главного момента
система может находиться в равновесии,
т. е. обращение в нуль главного вектора
и главного момента не только необходимо
для равновесия системы сил, но и
достаточно.
),
рассмотренного ранее. Таким образом,
убедились, что только при обращении в
нуль главного вектора и главного момента
система может находиться в равновесии,
т. е. обращение в нуль главного вектора
и главного момента не только необходимо
для равновесия системы сил, но и
достаточно.