

Условия равновесия плоской системы сил
Для равновесия плоской системы сил, действующих на твердое тело, необходимо и достаточно, чтобы суммы проекций этих сил на каждую из двух прямоугольных осей координат, расположенных в плоскости действия сил, были равны нулю и сумма алгебраических моментов сил относительно любой точки, находящейся в плоскости действия сил, также была равна нулю.
![]()
Для равновесия плоской системы параллельных сил, приложенных к твердому телу, необходимо и достаточно, чтобы алгебраическая сумма сил была равна нулю и сумма алгебраических моментов сил относительно любой точки, находящейся в плоскости сил, также была равна нулю.
![]()
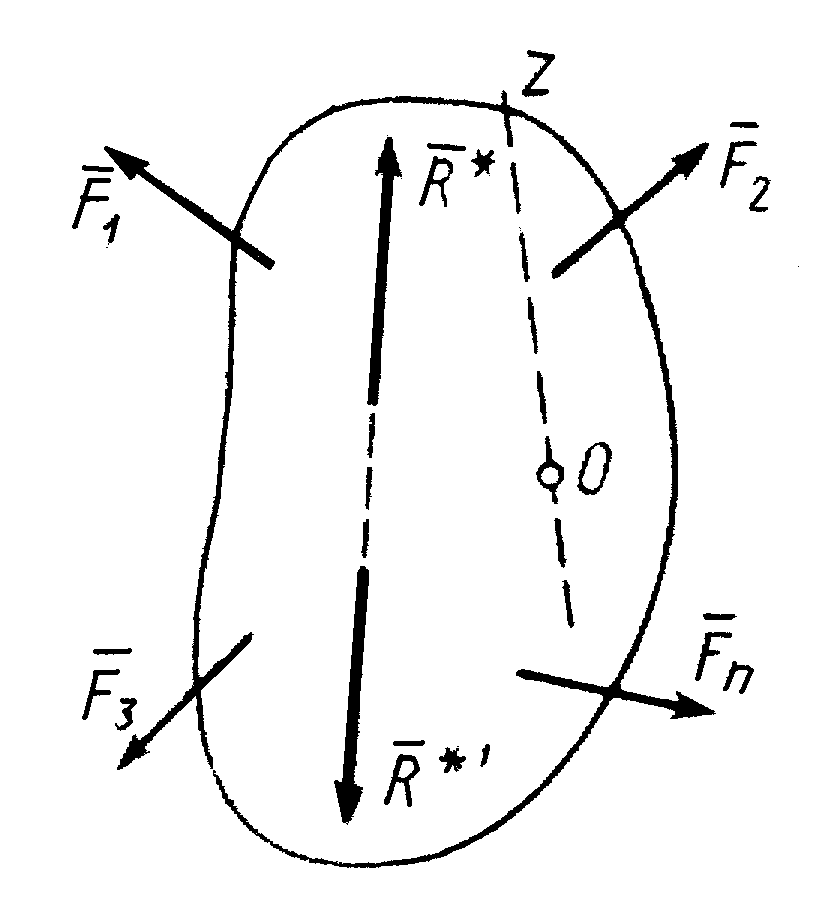
Плоская система сил. Теорема вариньона
1. Частные случаи приведения плоской системы сил Случай приведения к равнодействующей силе
Если при приведении плоской системы сил к какому-либо центру окажется, что главный вектор , а главный момент 0, а главный момент = 0 , то такая плоская система сил приводится к одной силе - равнодействующей системы сил.
Если при приведении плоской системы сил главный вектор 0 и главный момент 0, то такую систему можно упростить и привести к одной равнодействующей силе .
Если при приведении плоской системы сил к какому-либо центру окажется, что главный вектор , а главный момент = 0, а главный момент 0 , то такую плоскую систему сил можно привести к одной паре силе, алгебраический момент которой равен главному моменту системы сил относительно центра приведения, и в этом случае главный момент не зависит от центра приведения.
2.Теорема о моменте равнодействующей силы (теорема вариньона)
Векторный момент равнодействующей рассматриваемой системы сил относительно любой точки равен сумме векторных моментов всех сил этой системы относительно той же точки.
Пусть на твердое тело действует любая система сил ( ), имеющая равнодействующую , т. е.
( ) ~
Добавим к заданной системе сил ее уравновешивающую силу , которая равна по модулю, но противоположна по направлению равнодействующей силе и имеет с ней общую линию действия. Тогда
( , ) ~ ( , ) ~ 0.
Сумма векторных моментов сил этой новой системы сил относительно любой точки О равна нулю:
![]() ,
,
но
![]()
так как
![]() и
и
![]() – две
равные и
противоположно направленные силы,
действующие вдоль одной прямой.
– две
равные и
противоположно направленные силы,
действующие вдоль одной прямой.
![]()
![]()
![]()
т. е. момент равнодействующей силы относительно произвольной оси равен сумме моментов сил системы относительно той же оси.
3. РАЗЛИЧНЫЕ ФОРМЫ УСЛОВИЙ РАВНОВЕСИЯ ПЛОСКОЙ СИСТЕМЫ СИЛ
Теорема о трех моментах
(вторая форма условий равновесия)
Для равновесия плоской системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы суммы алгебраических моментов сил системы относительно трех любых точек, расположенных в плоскости действия сил и не лежащих на одной прямой, были равны нулю, т. е.
![]()
![]()
![]()
Третья форма условий равновесия
Для равновесия плоской системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы суммы алгебраических моментов сил относительно двух любых точек, лежащих в плоскости действия сил, были равны нулю и алгебраическая сумма проекций этих сил на какую-либо ось плоскости, не перпендикулярную прямой, проходящей через две моментные точки, также была равна нулю, т. е.
![]()
ТРЕНИЕ
При движении или стремлении двигать одно тело по поверхности другого в касательной плоскости поверхностей соприкосновения возникает сила трения скольжения.