

4. Уравнение центральной винтовой оси
П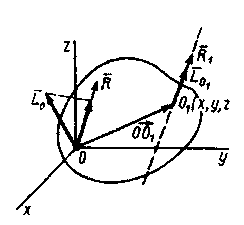 редположим,
что в центре приведения, принятом за
начало координат, получены
главный вектор
с проекциями на оси
координат
редположим,
что в центре приведения, принятом за
начало координат, получены
главный вектор
с проекциями на оси
координат
![]() и главный момент
с проекциями
и главный момент
с проекциями
![]() При приведении системы сил
к центру приведения О1
(рис. 30) получается
динама с главным вектором
и главным моментом
При приведении системы сил
к центру приведения О1
(рис. 30) получается
динама с главным вектором
и главным моментом
![]() ,
Векторы
и
как образующие линаму. параллельны и
поэтому могут отличаться только скалярным
множителем k0.
Имеем,,
так как
.
Главные моменты
и
,
удовлетворяют
соотношению
,
Векторы
и
как образующие линаму. параллельны и
поэтому могут отличаться только скалярным
множителем k0.
Имеем,,
так как
.
Главные моменты
и
,
удовлетворяют
соотношению
![]()
![]()
Подставляя , получим
![]()
Координаты
точки О1
в
которой получена динама, обозначим х,
у, z.
Тогда проекции вектора
![]() на оси координат равны
координатам х, у, z.
Учитывая это, (*) можно выразить в форме
на оси координат равны
координатам х, у, z.
Учитывая это, (*) можно выразить в форме

где i.
j
,k
- единичные векторы
осей координат, а векторное произведение
*
представлено
определителем. Векторное уравнение
(**) эквивалентно трем скалярным, которые
после отбрасывания
![]() можно представить в виде
можно представить в виде
![]()
Полученные линейные уравнения для координат х, у, z являются уравнениями прямой линии - центральной винтовой оси. Следовательно, существует прямая, в точках которой система сил приводится к динаме.
5. Частные случаи приведения пространственной
СИСТЕМЫ ПАРАЛЛЕЛЬНЫХ СИЛ
В отличие
от произвольной системы сил пространственная
система параллельных
сил не приводится к динаме. так как для
нее главный вектор и главный
момент в общем случае взаимно
перпендикулярны. Для доказательства
)того
рассмотрим пространственную систему
параллельных сил для которой 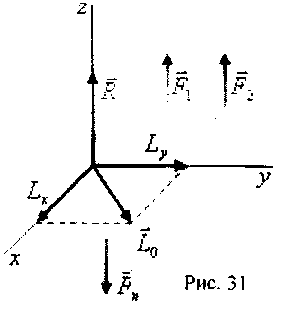 главный
вектор и главный момент не равны нулю.
Выберем за центр приведения точку О
-
начало декартовой системы координат,
ось Oz
которой
направим параллельно силам (рис.31).
Тогда
проекции главного вектора на оси
координат
главный
вектор и главный момент не равны нулю.
Выберем за центр приведения точку О
-
начало декартовой системы координат,
ось Oz
которой
направим параллельно силам (рис.31).
Тогда
проекции главного вектора на оси
координат
![]()
так как параллельные силы перпендикулярны этим осям. Только проекция главного вектора на ось Oz в общем случае не равна нулю. Она равна алгебраической сумме параллельных сил, т. е.
![]()
Следовательно, главный вектор параллелен оси Oz. Для проекций главного момента на оси координат имеем:
![]()
Проекция главного момента на ось Oz равна нулю, так как каждая сила параллельна этой оси.
Таким образом, главный момент расположен в плоскости Оху, перпендикулярной главному вектору, направленному по оси Oz. В этом случае система сил приводится к равнодействующей.
Для системы параллельных сил возможны следующие частные случаи приведения:
![]()
— система приводится к паре сил;
![]()
Или
![]()
— система приводится к равнодействующей силе;
![]()
— имеем равновесную систему сил.
Если главный вектор не равен нулю, то система параллельных сил приводится только к равнодействующей силе, параллельной главному вектору и равной ему по величине.
6. Центр системы параллельных сил
На
твёрдое тело действует система
параллельных сил
![]() .
Получим
формулу
для определения радиус-вектора центра
параллельных сил если известны
параллельные
силы и радиус-векторы точек их приложения.
Для этого выберем единичный
вектор
.
Получим
формулу
для определения радиус-вектора центра
параллельных сил если известны
параллельные
силы и радиус-векторы точек их приложения.
Для этого выберем единичный
вектор
![]() ,
параллельный силам. Тогда каждая из
параллельных сил
,
параллельный силам. Тогда каждая из
параллельных сил
![]()
где
![]() - алгебраическое
знамение силы. Оно положительно.
если сила
- алгебраическое
знамение силы. Оно положительно.
если сила![]()
направлена
в одну сторону с единичным вектором
![]() ,
и отрицательно, если направление
силы противоположно направлению
единичного вектора. Для равнодействующей
силы параллельных сил соответственно
имеем
,
и отрицательно, если направление
силы противоположно направлению
единичного вектора. Для равнодействующей
силы параллельных сил соответственно
имеем
![]()
Так как система параллельных сил, по предположению, приводится к равнодействующей, то к ней можно применить теорему Вариньона относительно точки О:
![]()
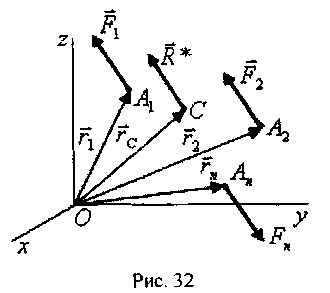
Для векторных моментов сил относительно точки О имеем
![]()
![]()
где
![]() -
радиус-вектор центра параллельных сил,
проведенный из точки О;
-
радиус-вектор центра параллельных сил,
проведенный из точки О;
![]() -
-
радиус-вектор точки приложения силы Ft, проведенный из той же точки
(рис. 32).Если подставить эти значения векторных моментов сил в теорему Вариньона относительно точки О, то после переноса всех слагаемых в левую часть
равенства
и вынесения за скобку общего множителя
![]() получим
получим

Так как центр параллельных сил, а следовательно, и его радиус-вектор не зависят
от направления параллельных сил. характеризуемого единичным вектором . то вышеприведенное условие должно выполняться при любом направлении этого вектора.
Это возможно только при обращении в нуль векторной величины, стоящей в скобках, т.е.
![]()
Или

По вышеприведенной формуле определяют радиус-вектор центра параллельных сил, если заданы эти силы и их точки приложения.
Так как
алгебраические значения параллельных
сил входят в числитель и в знаменатель
формулы, то
![]() не
зависит от того, какое из двух
направлений параллельных
сил считается положительным.
не
зависит от того, какое из двух
направлений параллельных
сил считается положительным.
В проекциях на оси координат из формулы получаем:

По этим формулам вычисляют координаты центра параллельных сил хс, yc, zс, если известны алгебраические значения параллельных сил Fi и координаты точек приложения этих сил хi, yi, zi,. Векторную величину
![]()
называют статическим моментом системы параллельных сил относительно точки О. Алгебраические величины
![]()
![]()
![]()
называют статическими моментами относительно координатных плоскостей. Для плоской системы параллельных сил, расположенных, например, в плоскости Оху, вводят понятие статических моментов относительно осей координат Ох и Оу по формулам
![]()
![]()
Статические моменты параллельных сил относительно точки и координатных плоскостей определяются по единому правилу: алгебраические значения сил умножают на расстояния от точек приложения сил до точки или плоскости и результаты суммируют.