

У Рис. 6 словия равновесия системы сходящихся сил
Условие равновесия сходящихся сил в геометрической форме: для равновесия системы сходящихся сил, приложенных к твердому телу, необходимо и достаточно, чтобы силовой многоугольник, построенный из этих сил, был замкнутым. (рис. 6)
Условия равновесия пространственной системы сходящихся сил в аналитической форме:
![]() ;
;
![]() ;
;
![]() ,
,
т. е. для равновесия пространственной системы сходящихся сил, приложенных к твердому телу, необходимо и достаточно, чтобы суммы проекций сил на каждую из трех прямоугольных осей координат были равны нулю.
; ,
т. е. для равновесия плоской системы сходящихся сил, действующих на твердое тело, необходимо и достаточно, чтобы суммы проекций этих сил на каждую из двух прямоугольных координатных осей, лежащих в плоскости сил, были равны нулю.
Проецирование силы на оси координат
Если дана сила , то ее проекции на прямоугольные оси координат вычисляются по формулам скалярных произведений
![]() ;
;
![]() ;
;
![]() ,
,
где
![]() – единичные векторы. Косинусы углов
силы с осями координат удовлетворяют
условию
– единичные векторы. Косинусы углов
силы с осями координат удовлетворяют
условию
![]() .
.
П
Рис.
7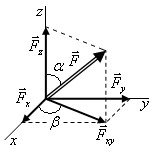
Получаем
![]() .
.
Проецируя векторы векторного равенства на координатные оси, имеем
![]() ;
;
![]() ;
;
![]()
так как
![]()
Векторные величины
![]() называются составляющими силы
по осям координат. Скалярные величины
называются составляющими силы
по осям координат. Скалярные величины
![]() являются проекциями силы
на оси координат.
являются проекциями силы
на оси координат.
Глава 2 моменты силы относительно точки и оси
1. Алгебраический момент силы относительно точки
При рассмотрении плоской системы сил используется понятие алгебраического момента силы относительно точки.
Рис.
8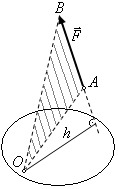
Алгебраическим моментом силы относительно точки называют произведение модуля силы на плечо силы относительно этой точки (рис. 8), взятое со знаком плюс или минус.
Плечом h силы относительно точки называют кратчайшее расстояние между этой точкой и линией действия силы, т. е. длину отрезка перпендикуляра, опущенного из точки на линию действия силы .
![]() .
.
Если сила стремится вращать тело вокруг моментной точки против часовой стрелки, то берем знак плюс, если по часовой стрелке – знак минус.
Алгебраический момент силы представляет собой произведение силы на длину (в СИ – Н∙м).
Алгебраический момент силы не зависит от переноса силы вдоль ее линии действия. Алгебраический момент силы относительно точки равен нулю, если линия действия силы проходит через моментную точку.
Численно алгебраический момент
относительно точки равен удвоенной
площади треугольника, построенного на
силе
![]() и моментной точке:
и моментной точке:
![]() .
.
2. Векторный момент силы отосительно точки
При рассмотрении пространственной системы сил, приложенных к твердому телу, применяется понятие векторного момента силы относительно точки.
Векторным моментом силы относительно точки называют вектор, приложенный в этой точке и равный по модулю произведению силы на плечо силы относительно этой точки. Векторный момент силы направлен перпендикулярно плоскости, в которой лежат сила и моментная точка, таким образом, что с его конца можно видеть стремление силы вращать тело против движения часовой стрелки.
Условимся векторный момент силы
относительно точки О обозначать
![]() ,
а его числовую величину –
,
а его числовую величину –
![]() .
Тогда, согласно определению,
.
Тогда, согласно определению,
![]() .
.
Как и для алгебраического момента,
![]() .
.
Справедлива формула
![]() ,
,
где r – радиус-вектор, проведенный из моментной точки О в точку приложения сил или любую другую точку линии действия силы.
![]() ,
,
Вектор
![]() перпендикулярен плоскости треугольника
OAB.
перпендикулярен плоскости треугольника
OAB.
Если сила дана своими проекциями на оси координат и даны координаты x, у, z точки приложения этой силы, то векторный момент относительно начала координат, вычисляем по формуле
 ,
,
где – единичные векторы, направленные по осям координат.
Используя вышеприведенную формулу, можно выделить проекции на оси координат:

Модуль векторного момента и косинусы углов с осями координат определяем по формулам
