

5.3. Угловое ускорение тела при сферическом движении
При сферическом движении тела положение мгновенной оси вращения со временем изменяется, а следовательно, изменяется не только модуль, но и направление вектора угловой скорости тела. Векторная величина, характеризующая изменение угловой скорости в данный момент времени называется мгновенным угловым ускорением. Вектор углового ускорения равен производной от вектора угловой скорости по времени
![]() .
.

Рис. 2.89
Направление вектора углового ускорения не совпадает с мгновенной осью вращения (рис. 2.89).
5.4. Скорости точек твердого тела при сферическом движении
Скорости точек твердого тела, совершающего сферическое движение, в каждый момент времени определяются как их вращательные скорости при вращении вокруг мгновенной оси ОΏ (рис. 2.90). Из этого вытекает, что любая точка тела имеет в данный момент времени такую же скорость, какую она имела бы при вращении тела с угловой скоростью вокруг неподвижной оси, совпадающей с мгновенной осью.
Модуль скорости точки
![]() ,
,
где hΏ — расстояние от точки до мгновенной оси вращения.

Рис. 2.90
Распределение скоростей точек тела в данный момент времени t при сферическом движении по отношению к мгновенной оси вращения не отличается от распределения скоростей при вращении тела вокруг неподвижной оси.
Проекции скорости точки на неподвижные оси декартовых координат определяются по формулам Эйлера:
![]()
Проекции скорости на подвижные оси декартовых координат определяются по аналогичным формулам (рис. 2.91):
![]()

Рис. 2.91
Если
положение мгновенной оси
Ώ
уже установлено, то для нахождения
угловой скорости
![]() достаточно знать скорость
достаточно знать скорость
![]() какой-либо
точки А,
не лежащей на мгновенной оси (рис.
2.92). Тогда,
опустив из этой точки перпендикуляр АК
на мгновенную
ось Ώ
, получим
какой-либо
точки А,
не лежащей на мгновенной оси (рис.
2.92). Тогда,
опустив из этой точки перпендикуляр АК
на мгновенную
ось Ώ
, получим
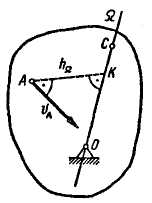
Рис. 2.92
![]()
откуда
![]()
т.
е. для
определения модуля угловой скорости
тела
следует
модуль скорости точки
![]() разделить на расстояние от точки А до
мгновенной оси вращения.
разделить на расстояние от точки А до
мгновенной оси вращения.
5.5. Ускорения точек твердого тела при сферическом движении
Теорема Ривальса: ускорение любой точки твердого тела при сферическом движении определяется как геометрическая сумма ее вращательного и осестремительного ускорений (рис. 2.93).
![]()
Здесь
![]() — вращательное
ускорение точки;
— вращательное
ускорение точки;
![]() —
осестремительное
(центростремительное) ускорение точки.
—
осестремительное
(центростремительное) ускорение точки.
Вектор
вращательного ускорения точки
![]() направлен перпендикулярно плоскости,
проходящей через вектор углового
ускорения
и радиус-вектор точки
направлен перпендикулярно плоскости,
проходящей через вектор углового
ускорения
и радиус-вектор точки
![]() ,
в ту сторону, откуда поворот вектора
к вектору
на наименьший угол виден происходящим
в сторону, обратную вращению часовой
стрелки.
,
в ту сторону, откуда поворот вектора
к вектору
на наименьший угол виден происходящим
в сторону, обратную вращению часовой
стрелки.

Рис. 2.93
Модуль вращательного ускорения
![]() ,
,
где
![]() =МК1
- расстояние от точки М
до оси углового ускорения Е.
=МК1
- расстояние от точки М
до оси углового ускорения Е.
Вектор
осестремительного ускорения
![]() направлен перпендикулярно векторам
угловой скорости
и линейной
скорости точки
направлен перпендикулярно векторам
угловой скорости
и линейной
скорости точки
![]() ,
т. е. по перпендикуляру, опущенному
из точки М
на мгновенную ось Ώ,
в ту сторону, откуда поворот вектора
,
условно отложенного в точке М,
к вектору
,
т. е. по перпендикуляру, опущенному
из точки М
на мгновенную ось Ώ,
в ту сторону, откуда поворот вектора
,
условно отложенного в точке М,
к вектору
![]() на наименьший угол виден происходящим
в сторону, обратную вращению часовой
стрелки.
на наименьший угол виден происходящим
в сторону, обратную вращению часовой
стрелки.
Модуль осестремительного ускорения
![]() ,
,
где hΏ = MК2 — расстояние от точки М до мгновенной оси Ώ.
Модуль ускорения точки как диагонали параллелограмма ускорений
![]()
или
![]()
Вращательное
ускорение точки при сферическом движении
тела
![]() определяется относительно оси углового
ускорения Е
и направлено перпендикулярно плоскости,
проходящей через вектор углового
ускорения
и
радиус-вектор
(перпендикулярно hЕ),
т. е.
определяется относительно оси углового
ускорения Е
и направлено перпендикулярно плоскости,
проходящей через вектор углового
ускорения
и
радиус-вектор
(перпендикулярно hЕ),
т. е.
![]() и
и
![]() .
Следовательно,
направление
не совпадает с направлением скорости
точки
.
.
Следовательно,
направление
не совпадает с направлением скорости
точки
.
Вращательное
и осестремительное ускорения точки
и
![]() при сферическом движении не следует
смешивать с ее касательным и нормальным
ускорениями
при сферическом движении не следует
смешивать с ее касательным и нормальным
ускорениями
![]() и
и
![]() .
.