

2. Способы организации пдп: метод захват цикла.
Более распространенным является ПДП с "захватом цикла" и принудительным отключением процессора от шин системного интерфейса. Для реализации такого режима ПДП системный интерфейс микроЭВМ дополняется двумя линиями для передачи управляющих сигналов "Требование прямого доступа к памяти" (ТПДП - DREQ) и "Предоставление прямого доступа к памяти" (ППДП - DACK).
Управляющий сигнал ТПДП формируется контроллером прямого доступа к памяти. Процессор, получив этот сигнал, приостанавливает выполнение очередной команды, не дожидаясь ее завершения, выдает на системный интерфейс управляющий сигнал ППДП и отключается от шин системного интерфейса. С этого момента все шины системного интерфейса управляются контроллером ПДП. Контроллер ПДП, используя шины системного интерфейса, осуществляет обмен одним байтом или словом данных с памятью микроЭВМ и затем, сняв сигнал ТПДП, возвращает управление системным интерфейсом процессору. Как только контроллер ПДП будет готов к обмену следующим байтом, он вновь "захватывает" цикл процессора и т.д. В промежутках между сигналами ТПДП процессор продолжает выполнять команды программы. Тем самым выполнение программы замедляется, но в меньшей степени, чем при обмене в режиме прерываний.
”Метод захвата цикла” . ЦП полностью отключен от шин , а контроллер завладевает всеми шинами , и др. подход : использование шинного интерфейса для организации ПДП.
Достоинсва :
Н е
требует дополнительного контроллера
, сокращается кол-во аппаратуры
е
требует дополнительного контроллера
, сокращается кол-во аппаратуры
Недостатки :
Быстродействие не велико (что бы считать данные , они считывают из внешнего уст-ва , через дополнительную часть и записываются в адресуемую память)
БИЛЕТ N 4
1. Прямой доступ к памяти. Общая характеристика.
Это такой метод вв/выв , при котором управление вв/выв осуществляется внешними устройством. Как осуществляется пересылка информации из порта , если наши процессы происходятна этапе работы процессора? – Для того , что бы процессор считал 1 байт из порта :
1. Должен быть считан код команды IN .Процессор считывает данные через указанный адрес из порта ввода.Запоминает данные во внутреннем регистре.
2. Процессор считывает команду пересылкиданных через регистор памяти.Пересылка содержимого из регистра.
 На 1 пересылку
происходит считывание 1-2 команд.
Перресылка не удобна , т.к. требует
большое кол- во тактов ,следовательно
был разработан метод прямого доступа
к памяти.
На 1 пересылку
происходит считывание 1-2 команд.
Перресылка не удобна , т.к. требует
большое кол- во тактов ,следовательно
был разработан метод прямого доступа
к памяти.
In Ax,DX затраты на 1 пересылку.
Out Ax,[Bx]
Для организации пересылок необходимо внешнее специальное устройство (контроллер прямого доступа к памяти), который управляет вв/выв.
Внешнее устройство = внешнее устроцство + контроллер ПДП. ЦП не участвует и отключен от всех шин.
2. Особенности разработки по в системах с прерываниями.
Для обработки событий, происходящих асинхронно по отношению к выполнению программы, лучше всего подходит механизм прерываний. Прерывание можно рассматривать как некоторое особое событие в системе, требующее моментальной реакции. С каждым номером прерывания связывается то или иное событие. Система умеет распознавать, какое прерывание, с каким номером оно произошло, и запускает соответствующую этому номеру процедуру.
Программы могут сами вызывать прерывания с заданным номером. Для этого они используют команду INT. Это так называемые программные прерывания. Программные прерывания не являются асинхронными, так как вызываются из программы (а она-то знает, когда она вызывает прерывание!).
Аппаратные прерывания вызываются физическими устройствами и приходят асинхронно. Эти прерывания информируют систему о событиях, связанных с работой устройств.
Использование прерываний при работе с медленными внешними устройствами позволяют совместить ввод/вывод с обработкой данных в центральном процессоре и в результате повышает общую производительность системы. Иногда желательно сделать систему нечувствительной ко всем или отдельным прерываниям. Для этого используют так называемое маскирование прерываний, о котором мы еще будем подробно говорить. Но некоторые прерывания замаскировать нельзя, это немаскируемые прерывания.
Заметим еще, что обработчики прерываний могут сами вызывать программные прерывания, например, для получения доступа к сервису BIOS или DOS (сервис BIOS также доступен через механизм программных прерываний).
Составление собственных программ обработки прерываний и замена стандартных обработчиков DOS и BIOS является ответственной и сложной работой. Необходимо учитывать все тонкости работы аппаратуры и взаимодействия программного и аппаратного обеспечения. При отладке возможно разрушение операционной системы с непредсказуемыми последствиями, поэтому надо очень внимательно следить за тем, что делает Ваша программа.
Для того чтобы связать адрес обработчика прерывания с номером прерывания, используется таблица векторов прерываний, занимающая первый килобайт оперативной памяти - адреса от 0000:0000 до 0000:03FF. Таблица состоит из 256 элементов - FAR-адресов обработчиков прерываний. Эти элементы называются векторами прерываний. В первом слове элемента таблицы записано смещение, а во втором - адрес сегмента обработчика прерывания.
Часто при выполнении критических участков программ, для того чтобы гарантировать выполнение определенной последовательности команд целиком, приходится запрещать прерывания. Это можно сделать командой CLI. Ее нужно поместить в начало критической последовательности команд, а в конце расположить команду STI, разрешающую процессору воспринимать прерывания. Команда CLI запрещает только маскируемые прерывания, немаскируемые всегда обрабатываются процессором.
Если вы используете запрет прерываний с помощью команды CLI, следите за тем, чтобы прерывания не отключались на длительный период времени, так как это может привести к нежелательным последствиям. Например, будут отставать часы.
Если вам надо запретить не все прерывания, а только некоторые, например, от клавиатуры, то для этого надо воспользоваться услугами контроллера прерываний. Подробно об этом немного ниже, сейчас отметим только, что выдачей в этот контроллер определенной управляющей информации можно замаскировать прерывания от отдельных устройств.
Вашей программе может потребоваться организовать обработку некоторых прерываний. Для этого программа должна переназначить вектор на свой обработчик. Это можно сделать, изменив содержимое соответствующего элемента таблицы векторов прерываний.
Очень важно не забыть перед завершением работы восстановить содержимое измененных векторов в таблице прерываний, т.к. после завершения работы программы память, которая была ей распределена, считается свободной и может быть использована для загрузки другой программы. Если вы забыли восстановить вектор и пришло прерывание, то система может разрушиться - вектор теперь указывает на область, которая может содержать что угодно.
Виситеме которая работает с прерыванием существует 2 процесса :
фоновой
процедура прерывания
Особенности :
переходы к процедурам прерывания возможно отобразить.Влюбом месте ПО может возникнуть прерывание.
Трудно подсчитать время работы программы , которая работает в системе прерывания.
В процедуре обработки прерывания необходимо сохранять состояние регистров,
которые используются.
БИЛЕТ N 5
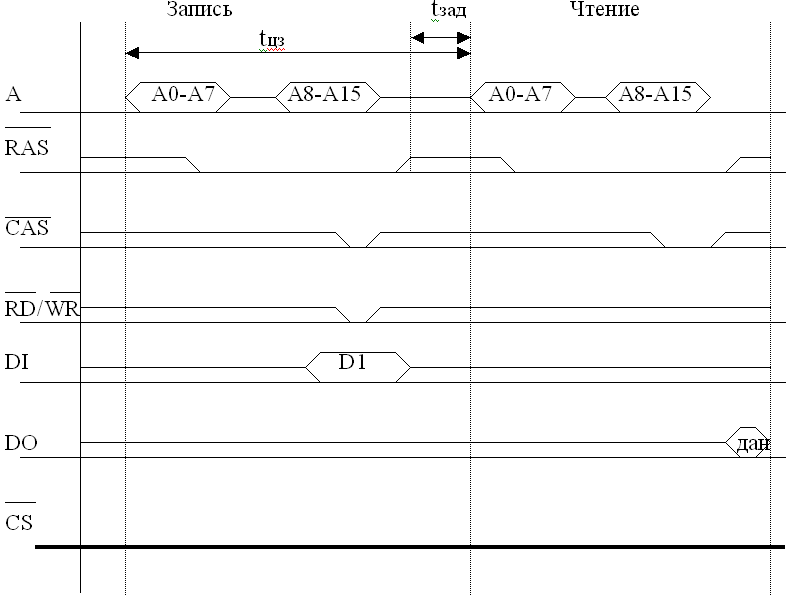
1 Динамические ЗУ. Устройство. Диаграммы чтения-записи. Регенерация информации.
Применяется контроллер где надо обработать большой объём информации. В основе её лежит конденсатор (если нет заряда 1, есть 0 ).Совокупность конденсаторов, которые образуют массив.
Особенности:
1. Динамическая память много медленней чем статическая . Разность быстродействий в 5 раз.Существуют паразитные процессы и конденсатор будет разряжаться.Чем лучше технологии , тем больше ёмкость и время на задержку уменьшится.
2. Адрес подаётся за 2 приёма ,т.к. быстродействие низкое.
3. Микросхемы имеют несколько режимов работы :
чтение / запись
страничный режим чтения / записи
режим регенерации необходим т.к. конденсатор имеет малую ёмкость и разрежается и несколько раз в секунду его надо заряжать . зарядка осуществляется в процессе чт / зап и перезаряжается вся строка целиком.
Диаграмма работы динамической памяти.
С уществует
2 вида памяти :
уществует
2 вида памяти :
- синхронная DI
- асинхронная






 COL
COL
 А0-А15
А0-А7 Буфер
А0-А15
А0-А7 Буфер

 адреса
адреса
рядов
запомин. ROW буфер
R





 AS
матрица DO
AS
матрица DO
 вых.
вых.

C


 AS Буфер
адреса колонки
AS Буфер
адреса колонки
 А8-А15
А8-А15
В целях упрощения регенерации матрицу делают прямоугольной.
Адрес подаётся за 2 приёма

Временные диаграммы.
Статичный режим, считывание сигнала RAS.

Достоинства :
Повышенное быстродействие за счёт устранения переходных процессов.
Способы регенерации информации.
Регенерация может осуществляться программным или аппаратным путём.
Использование специальных контроллеров для регенерации информации.
Совмещение регенерации с работой др. уустройств.
Использование специализированных контроллеров регенерации.