

5. Система управления схемами.
Структура электрических схем тягового подвижного состава во многом определяется примененной системой управления. Различают систему непосредственного управления и систему косвенного дистанционного управления.
На вагонах метрополитена применена косвенная дистанционная система управления. При такой системе управления машинист не осуществляет непосредственного переключения в силовой цепи, а управляет оборудованием при помощи низковольтных цепей, называемых цепями управления.
Коммутирующими аппаратами силовых цепей в этом случае являются контакторы, а также различные переключатели
В цепи управления тяговыми двигателями входят кулачковые элементы контроллера машиниста, катушки электропневматических вентилей приводов аппаратов, блок- контакты аппаратов, катушки и контакты реле, соединенные провода. Управление аппаратами вспомогательного оборудования происходит по отдельным электрическим цепям, включаемыми обычно кнопками, тумблерами.
Дистанционное управление осуществляется при помощи индивидуальных или групповых коммутирующих аппаратов (контакторов, переключателей). При системе с индивидуальными аппаратами каждый контактор выполнен конструктивно как отдельный аппарат и имеет свой индивидуальный привод (ПК – 162А, КПП – 113). Чтобы обеспечить необходимую зависимость и последовательность включения контакторов, реле и других аппаратов, применяется система блокировок, устанавливаемых на самих контакторах. Например:

Рис 4
если в схеме (рис. 4) необходимо, чтобы контактор КК включался только после включения реле РВ2, то в цепь катушки КК включаются замыкающие контакты РВ2.
Групповая система имеет ряд преимуществ перед индивидуальной, главное из которых состоит в том, что необходимая последовательность переключений в силовых цепях обеспечивается применением групповых аппаратов в которых очередность включения контакторов строго определена самой конструкцией.
Так как вал группового аппарата приводится в движение приводом, то управление электрическими цепями, в которые включены контакторы, сводится к управлению работой этого привода. Групповые аппараты подразделяются на двух позиционные (реверсор, переключатели ППС и ПМТ) и многопозиционные (реостатный контроллер).
На вагонах метрополитена все переключения в цепях: пуско-тормозных реостатов, реостатов ослабления поля, а также переключения соединения групп двигателей осуществляются групповыми аппаратами. Для реверсирования групп двигателей применяется групповой аппарат – реверсор.
Глава 2. Коммутирующие аппараты
1. Контакторы.
В процессе работы вагонов в электрических цепях происходит большое количество различных переключений. Эти переключения необходимы для осуществления процесса пуска, регулирования скорости, снижения скорости тяговых электрических двигателей, установлению необходимого режима работы электрооборудования. Каждое переключение изменяет цепь прохождения электрического тока, т. е. вносит изменения в электрическую схему.
Переключение электрических цепей в основном осуществляется контакторами, являющимися основными коммутирующими аппаратами. При помощи контакторов реализуется дистанционное управление электрооборудованием.
Силовые контакты контакторов изображены на схеме вагонов согласно п.24, табл.1. Если контакторы имеют дугогаси-тельные устройства, то такие контакторы обозначают на схеме символами, показанными в п.24 табл.1. Включение и выключение контакторов осуществляется специальными приводами, которые управляются дистанционно при помощи электрических цепей низкого напряжения в схеме управления и во вспомогательной схеме.
Для обеспечения установленной последовательности включения контакторов, согласования их срабатывания с работой других аппаратов электрической цепи, контакторы снабжены блокировочными контактами, которые также изображены в схеме управления.
Различают контакторы с индивидуальным приводом и контакторы установленные в аппаратах с двух и многопозиционным приводом. Определить, что контакты принадлежат отдельным контакторам, можно с помощью спецификации оборудования. Установив обозначение контактора по схеме, в графе «Наименование оборудования» читаем, что «контактор электропневматический» или «контактор электромагнитный». Обе эти надписи свидетельствуют, что контактор является индивидуальным.
Также для определения принадлежности контакторов можно воспользоваться таблицей замыкания контакторов, являющейся неотъемлемой частью схемы. В этих таблицах есть надписи, показывающие, какие контакторы являются индивидуальными, а какие групповыми. Кроме того, безошибочно можно определить принадлежность контакторов соответствующим аппаратам по диаграмме замыкания контакторов.
Например, из диаграммы замыкания контактов пневматического реверсора ПР-772Д (Рис.5) можно легко определить, что переключатель является групповым аппаратом и имеет восемь кулачковых контакторов, включенных в силовую цепь и четыре кулачковых контактора, включенных в схему управления.
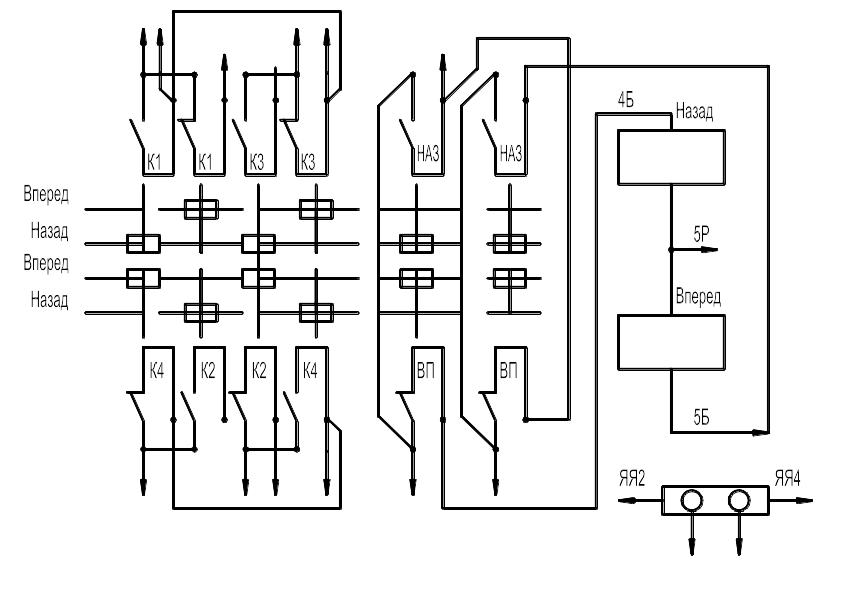
Рис.5 Диаграмма замыкания кулачковых контакторов реверсора ПР-772.
Индивидуальные контакторы имеют электромагнитные и электропневматические приводы. Электромагнитный привод приводит включение контактора при возбуждении его подъемной катушки. Электропневматический контактор имеет пневматический привод, управляемый электропневматическим вентилем, впускающим сжатый воздух в пневматический цилиндр привода. Катушки приводов индивидуальных контакторов, их силовые контакты и блок - контакты изображают на схемах одинаковыми символами (Рис.6)
А) Электропневматических.
Б) Электромагнитных.
1 – силовые контакты с дугогасительной катушкой
2 – замыкающие блок - контакты
3 – катушки приводов
4 – размыкающие блок – контакты
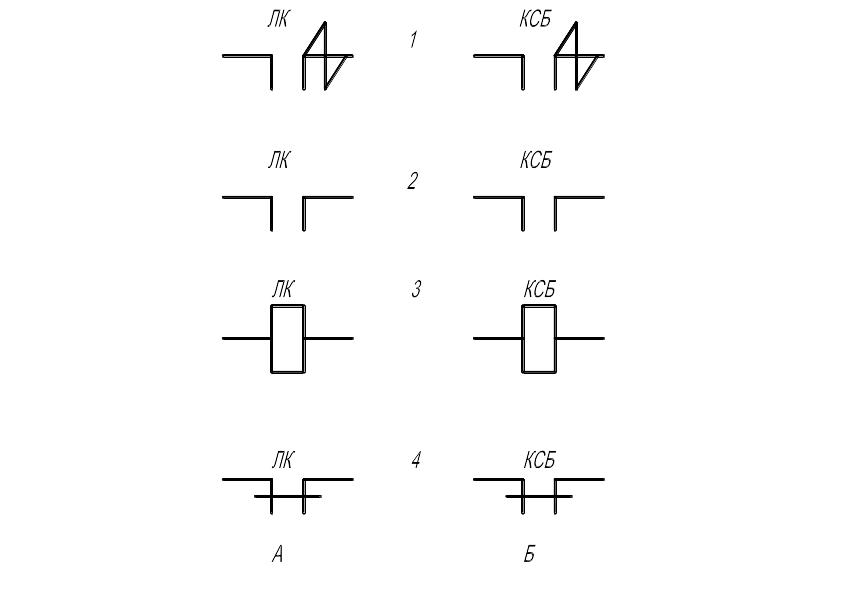
Рис.6 Изображение индивидуальных контакторов на схемах.
Горизонтальными линиями изображают провода, а буквами с цифрами над ними указывают маркировку проводов в цепи которых включены контакты и катушки по схеме силовой цепи и цепи управления. При чтении электрических схем нужно обращать внимание на наименование контакторов и помнить, что названия контакторов находятся в зависимости от места их включения и выполняемых ими функций. Так, контакторы, включающие силовую цепь на первой позиции контроллера машиниста называют линейными, переключающие пуско - тормозные реостаты – реостатными, цепь тяговых двигателей на переходных позициях – переходными, включающие цепи ослабления поля – шунтирующими.
На принципиальных схемах контакты и катушки контакторов обозначают буквами и цифрами согласно порядковому номеру в зависимости от наименования контакторов, например :ЛК – линейный контактор, КШ, КСБ – контакторы шунтировки.
Групповыми переключателями или групповыми контакторами в зависимости от функций, которые они выполняют ( например: переключение ступеней реостатов, групп двигателей ) называют аппараты состоящие из групп силовых контакторных элементов, которые переключаются от воздействия профилированных шайб, насаженных на один вал, приводимый во вращение общим приводом.
В зависимости от числа позиций, переключаемых приводом, групповые переключатели имеют электропневматические или электродвигательные приводы.
В спецификациях групповые переключатели обозначают в зависимости от типа применяемого привода, например:
ЭКГ – электрический кулачковый групповой;
ПКГ – пневматический кулачковый групповой.
Групповые контакторы, как и индивидуальные, имеют контакторные элементы, включенные в низковольтные цепи и переключаемые также как и силовые от воздействия профилированных шайб, насаженных на общий вал.
Силовые контакты групповых переключателей на схемах обозначают, по назначению аппарата, буквами с цифрами согласно порядковому номеру, например:
РК4, РК3 – контакторы реостатного контроллера;
ПТ1, ПМ1, ПП2 – контакторы переключателя положений;
ВП, НАЗ – контакторы реверсора.
Контакторы низковольтных групповых переключателей обозначают буквами с цифрами, согласно порядковому номеру, а катушки их приводов буквами: например, для переключателя ПМТ:
ПМУ 1, ПТУ 2 – кулачковые контакторы цепей управления;
ПМ, ПТ – катушки привода.
Цифрами указывают номера позиций многопозиционного переключателя, на которых данный контакт замкнут, например: РК1–6 – замкнут с 1 по 6 позицию, а на 7-18 позиции разомкнут.
Групповыми переключателями с электропневматическим приводом управляют при помощи электромагнитных вентилей включающего типа. На схемах электропневматический привод обозначают двумя катушками электромагнитных вентилей, впускающих сжатый воздух в цилиндр привода. Для правильного понимания схемы необходимо твердо уяснить, что вентиль включающего типа при возбуждении катушки впускает сжатый воздух в управляемый им цилиндр, а при обесточенной катушке соединяет этот цилиндр с атмосферой. От этого зависит положение кулачкового вала аппарата, а, следовательно, и положение контактора в схеме, например: аппарат ПМТ имеет два положения моторное ПМ и тормозное ПТ. При возбуждении катушки привода ПМ аппарат переключается в положение ПМ, и замыкаются кулачковые контакторы силовой цепи и цепи управления с обозначением ПМ; при возбуждении катушки привода ПТ аппарат переключается в положение ПТ, и замыкаются кулачковые контакторы силовой цепи и цепи управления с обозначением ПТ. Схема управления приводом ПМТ представлена на Рис.7
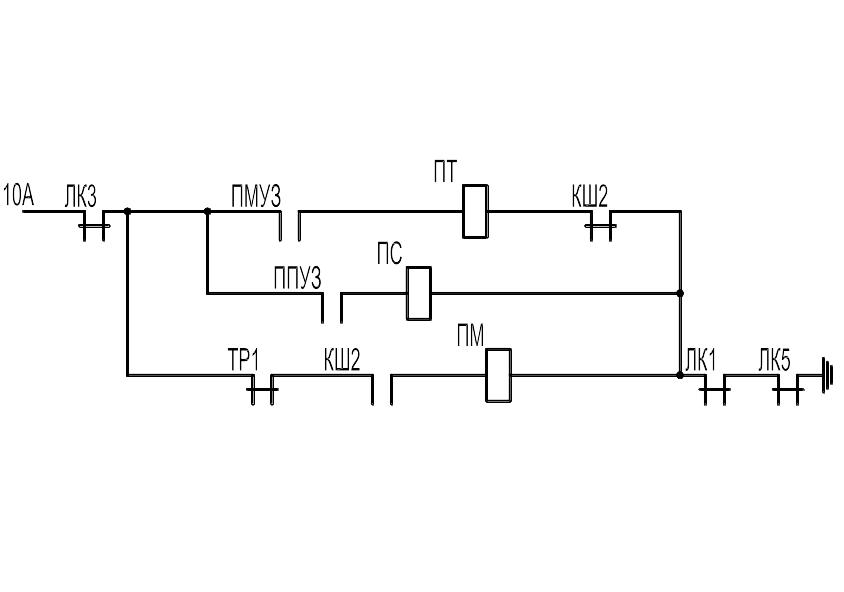
Рис.7 Схема управления приводом ПМТ.
Управление приводом ПМТ осуществляется от контроллера машиниста, от провода 10А. Цепь питания катушки ПМ замыкается при сборе схемы на ХОД после включения контактора КШ2. При разборе схемы ходового режима, после отключения контакторов ЛК3 и КШ2, получит питание катушка ПТ.
Диаграмма замыкания контакторных элементов аппаратов ПМТ и ППС представлена на Рис.8
Групповой многопозиционный переключатель с электродвигательным приводом управляется при помощи малогабаритного моторчика постоянного тока; на схеме обозначается СДРК (серводвигатель реостатного контроллера).

На Рис.9 показана схема управления приводом реостатного контроллера

Рис.9 Схема управления СДРК.
Реостатный контроллер имеет 36 фиксированных позиций. Для перехода кулачкового вала РК с позиции на позицию необходимо создать цепь питания якорю и обмотки возбуждения СДРК. Это достигается от контроллера машиниста, от провода 10А, который постоянно находится под напряжением +75В. Цепь якоря и обмотки возбуждения СДРК замыкается после включения соответствующих реле: стоп реле СР1 и реле времени РВ1.
Из схемы видно, что обмотка возбуждения СДРК реверсируется. Контактами реле реверсировки РР меняется направление тока в обмотке возбуждения СДРК, тем самым меняется направление вращения кулачкового вала РК. Необходимость применения реверсирования моторчика СДРК обусловлена конструкцией аппарата.
Рассматривая дальше схему, видим, что торможение вала РК на позиции происходит путем замыкания обмотки якоря СДРК накоротко. Это торможение осуществляется отключением якоря СДРК замыкающим контактом СР1 от питающего напряжения и замыканием его обмотки накоротко размыкающим контактом СР1 и кулачковым контактором РК РКП, замкнутым на позициях.
При работе реостатного контроллера замыкаются его кулачковые элементы согласно табл.2
Диаграмма замыкания кулачковых элементов реостатного контроллера изображена на Рис.24
По ней легко можно определить последовательность и продолжительность включения каждого контактора.