

7.2 Последовательно-параллельное соединение групп двигателей.
Соответствует положению главной рукоятки КВ- « Ход-2». Начинает вращаться реостатный контроллер РК с 1-ой по 18-ую позиции, а после переключения групп двигателей на параллельное соединение реостатный контроллер вращается в обратном направлении с 18-ой (19) по 5-ую (32) позиции.(см. Рис.23)
В дальнейшем все изменения в схеме происходят при вращении РК.
При переходе РК на 2-ую позицию отключаются контакторы КШ1, КШ2 и магнитное поле двигателей усиливается до 100%. Сила тяги на каждом двигателе возрастает в 4 раза. С 3-ей по 14-ую позиции происходит вывод пусковых реостатов из цепи двигателей. При вращении РК его кулачковые элементы замыкаются и размыкаются согласно таблице, изображенной на рис.24, в прямой последовательности.
Кулачковые шайбы вала РК включают силовые контакторы, которые закорачивают отдельные секции пускового реостата. Вследствие уменьшения сопротивления цепи происходит увеличение тока от Imin до Imax , а затем плавное его уменьшение за счет возрастания противо-ЭДС.
Пусковой ток определится по формуле:
;
из которой видно, что при уменьшении сопротивления пускового реостата R ток возрастает, а с увеличением противо-ЭДС E –ток уменьшается.
С 15-ой по 18-ую позиции все сопротивления выведены и тяговые двигатели начинают работать на безреостатной характеристике при 100 % поле. На 18-ой позиции РК останавливается.
Цепь тока на 17-ой-18-ой позиции РК:
ТР, КС1, П, ГВ, ВА, ЛК1, РП1-3, ДР1, ДР2, ЛК3, Я1, Я3, ВП, обмотки возбуждения 1-го и 3-го двигателей, ВП, РУТ, ПМ3, РК13, РК19, ЛК2, РК14, РП2-4, Я2, шунт амперметра, Я4, ДР2, ДР1, ЛК4, ПМ1, РУТ, ВП, обмотки возбуждения 4-го и 2-го двигателей, ВП, ПМ2, КС2, ЗУМ, «земля».
На 16-ой позиции РК получает питание катушка ПП переключателя ППС и аппарат переключает группы двигателей с последовательного соединения на параллельное по «мостовой» схеме. В момент перехода сначала замыкаются силовые контакторы ПП2 и ПП3, а затем размыкается контактор ЛК2 ( при переходе переключателя ППС из положения ПС в ПП, РК дойдет до 17-ой (18) позиции и остановится).
В результате образуются две параллельные группы двигателей и в каждую группу двигателей для ограничения тока после перехода аппарата ППС из ПС в ПП, вводится реостат. В первую группу двигателей реостат Р9-Р3 величиной 0,909 Ом, а во вторую группу двигателей реостат Р17-Р23 величиной 0,909 Ом.
Таким образом, 17-я(18) позиция РК без его вращения стала 20-ой(19). Цепь тока на 20-ой (19) позиции РК(см. Рис23:
ТР, КС1, П, ГВ, ВА, две параллельные цепи:
1) ЛК1, РП1-3, ДР1, ДР2, ЛК3, Я1, Я3, ВП, обмотки возбуждения 1-го и 3-го двигателей, ВП, РУТ, ПМ3, РК13, реостат Р9-Р3, ПП2, КС2, ЗУМ, «земля».
2) ЛК5, ПП3, реостат Р17-Р23, РК14, РП2-4, Я2, шунт амперметра, Я4, ДР2, ДР1, ЛК4, ПМ1, РУТ, ВП, обмотки возбуждения 4-го и 2-го двигателей, ПМ2, КС2, ЗУМ, «земля».
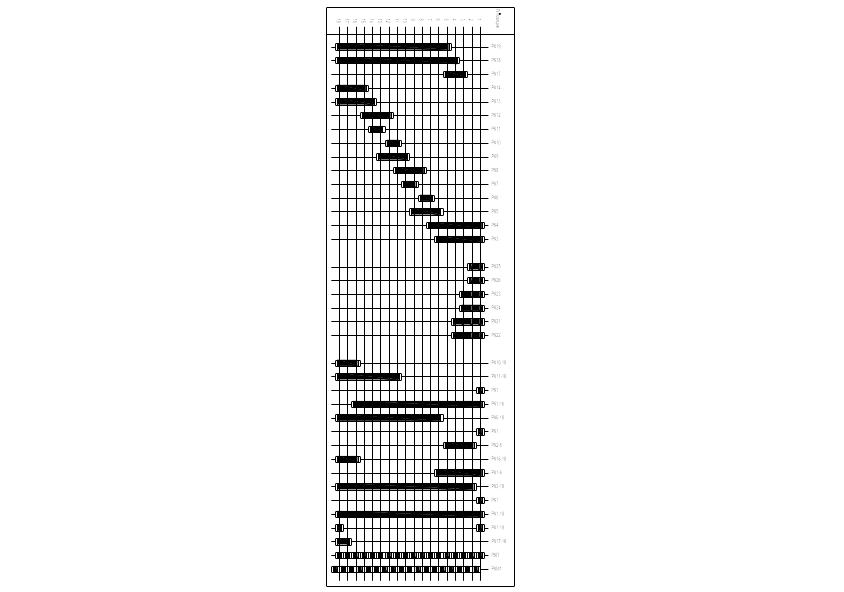
Рис.24 Диаграмма включения кулачковых контакторов группового реостатного контроллера ЭКГ-39Б.

После переключения переключателя ППС в положение ПП реостатный контроллер начинает вращаться в обратном направлении с 17 (20) позиции по 5 (32) позицию , что приводит к замыканию его кулачковых контакторов в обратной последовательности. На 17 (20) и 16 (21) позициях вывод реостатов не происходит и сопротивление в цепи групп двигателей не изменяется. Эти позиции выполнены для смягчения броска тока при переходе из ПС в ПП. Начиная с 15 (22) позиции по 7 (30) позиции происходит вывод пусковых реостатов из цепи двигателей под контролем РУТ. Выведение секций реостатов из цепей групп двигателей происходит поочередно, что способствует смягчению толчков тягового усилия при переходе с позиции на позицию.
На 5 (32) позиции РК останавливается. Все реостаты выведены. Эта позиция является автоматической характеристикой при последовательно – параллельном соединении групп двигателей и 100% поле. Этой позицией целесообразно пользоваться при движении на затяжных подъемах.(см. Рис.25)
Цепь тока на 5 (32) позиции :
ТР, КС1, П, ГВ, ВА, две параллельные цепи:
ЛК1, РП1-3, ДР1, ДР2, ЛК3, Я1,Я3,ВП, обмотки возбуждения 1-го и 3-го двигателей, ВП, РУТ, ПМ3, РК3, ПП2, КС2, ЗУМ, «земля».
ЛК5, ПП3, РК4, ПР2-4, Я2, шунт амперметра, Я4, ДР2, ДР1, ЛК4,ПМ1, РУТ, ВП, обмотки возбуждения ;4-го и 2-го двигателей, ВП, ПМ2, КС2, ЗУМ, «земля».