

30. Явления в ам с вращающимся ротором.
Во вращающейся асинхронной машине в двигательном режиме работы электрическая энергия, потребляемая первичной обмоткой из питающей сети, за вычетом потерь в машине превращается в механическую энергию на валу машины. В генераторном режиме, наоборот, механическая энергия, подводимая к валу, превращается в электрическую энергию в первичной обмотке и передается в сеть. Кроме того, режим работы асинхронной машины при вращающемся роторе более сложен в том отношении, что в этом случае частоты токов первичной и вторичной цепей не равны.
По этой причине, в частности, невозможно изображение первичных и вторичных электрических величин на общих временных векторных диаграммах.
32. Явления в асинхронной машине с неподвижным ротором, векторная диаграмма х.Х., получение вращающего магнитного поля.
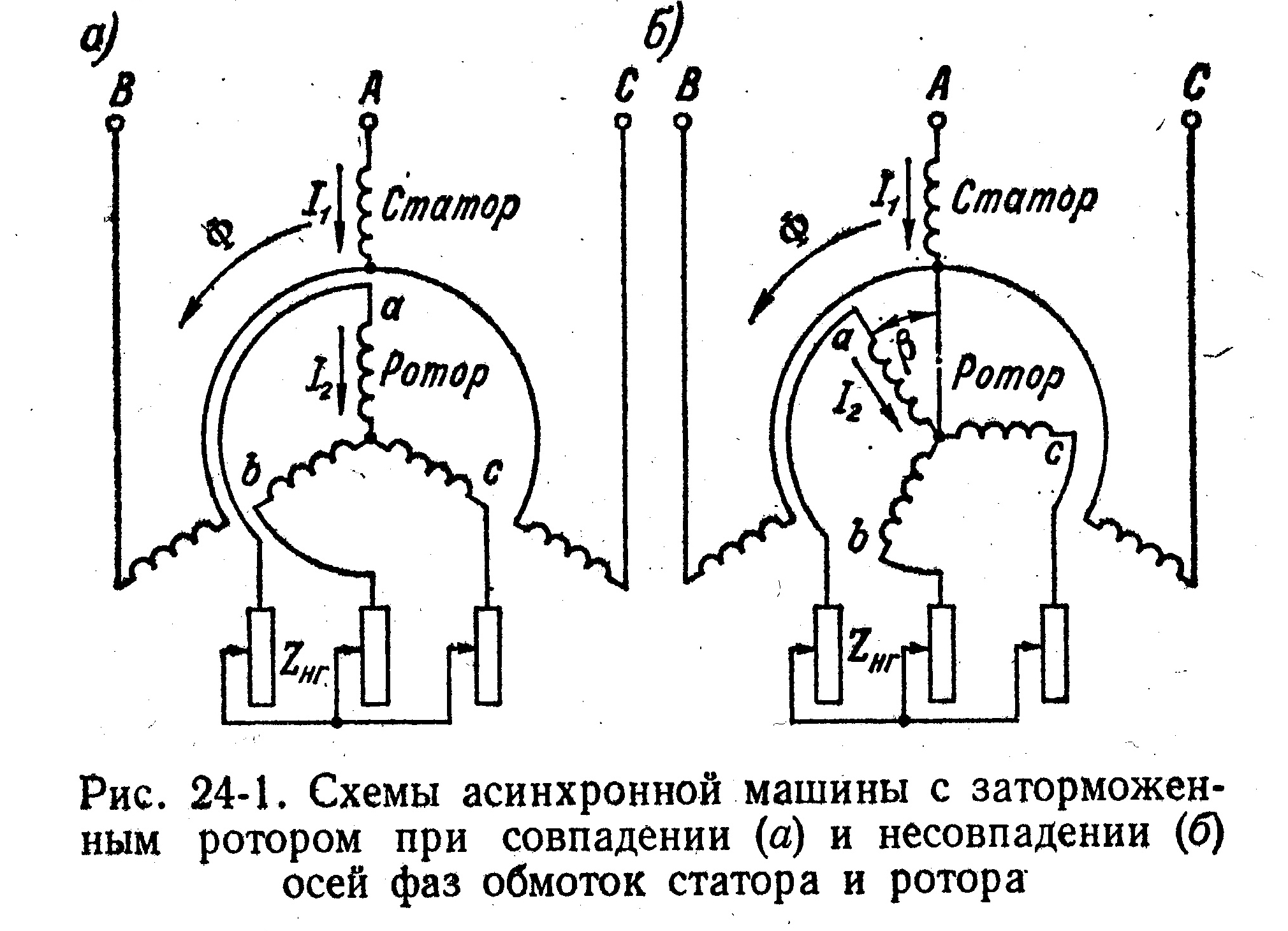
При заторможенном роторе машина работает как трансформатор. В этом режиме машина является электромагнитным преобразователем и ре преобразует эл. энергия в мех. или наоборот, используются машины с фазным ротором. При этом между обмотками статора и ротора возможны трансф. и автотрансф. связьи. Потоки Ф1 и Ф2 вращаются с одинаковой скоростью п1 и образуют общий вращающийся поток Ф. Потоки Ф1 и Ф2 по отдельности в действительности не существуют, и магнитное состояние машины и степень насыщения магнитной цепи определяются величиной результирующего потока Ф.
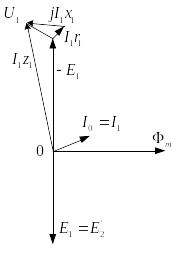
Как и у трансформатора, результирующий поток индуктирует в первичной и вторичной обмотках э. д. с. Е1 и Е2.
Получение вращающего магнитного поля.
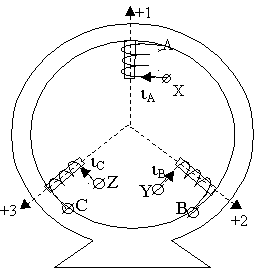
В неподвижном статоре расположены три
катушки, создающие круговое вращающееся
магнитное поле. Положительное направление
оси первой катушки с началом "А" и
концом "Х" обозначено через "+1",
положительное направление второй
катушки "B-Y" – через "+2" и
положительное направление оси третьей
"C-Z" через "+3". t A=Imsinω t, t B=Imsin(ω
t-120°),t C=Imsin(ω t-240°),где ω =2πf1 ,а f1 – частота
питающей сети. Ток, проходя по катушке
создает переменный магнитный поток,
направленный по оси катушки в положительном
или отрицательном направлении. Мгновенное
значение результирующего потока машины
равно сумме мгновенных значений потоков
фаз, т.е. Ф=ФА+ФВ+ФСб если каждая фаза
обмотки представлена в машине одной
катушкой, то при питании фаз симметричной
трехфазной системой токов, меняющихся
с частотой f1, в рабочем объеме машины
образуется круговое магнитное поле,
вращающееся с частотой f1 или с угловой
скоростью n1=60 f1(об/мин). Индукция в
воздушном зазоре электрической машины
переменного тока определяется
распределением НС вдоль окружности
статора. Если пренебречь магнитным
сопротивлением ферромагнитных участков
магнитной цепи машины, то под кривой
распределения НС
![]() можно понимать кривую распределения
магнитного напряжения
можно понимать кривую распределения
магнитного напряжения
![]() в зазоре машины. При равномерном воздушном
зазоре
в зазоре машины. При равномерном воздушном
зазоре
![]() такой же вид будет иметь и кривая
распределения индукции
такой же вид будет иметь и кривая
распределения индукции
![]() в воздушном зазоре, называемая кривой
поля машины.
в воздушном зазоре, называемая кривой
поля машины.
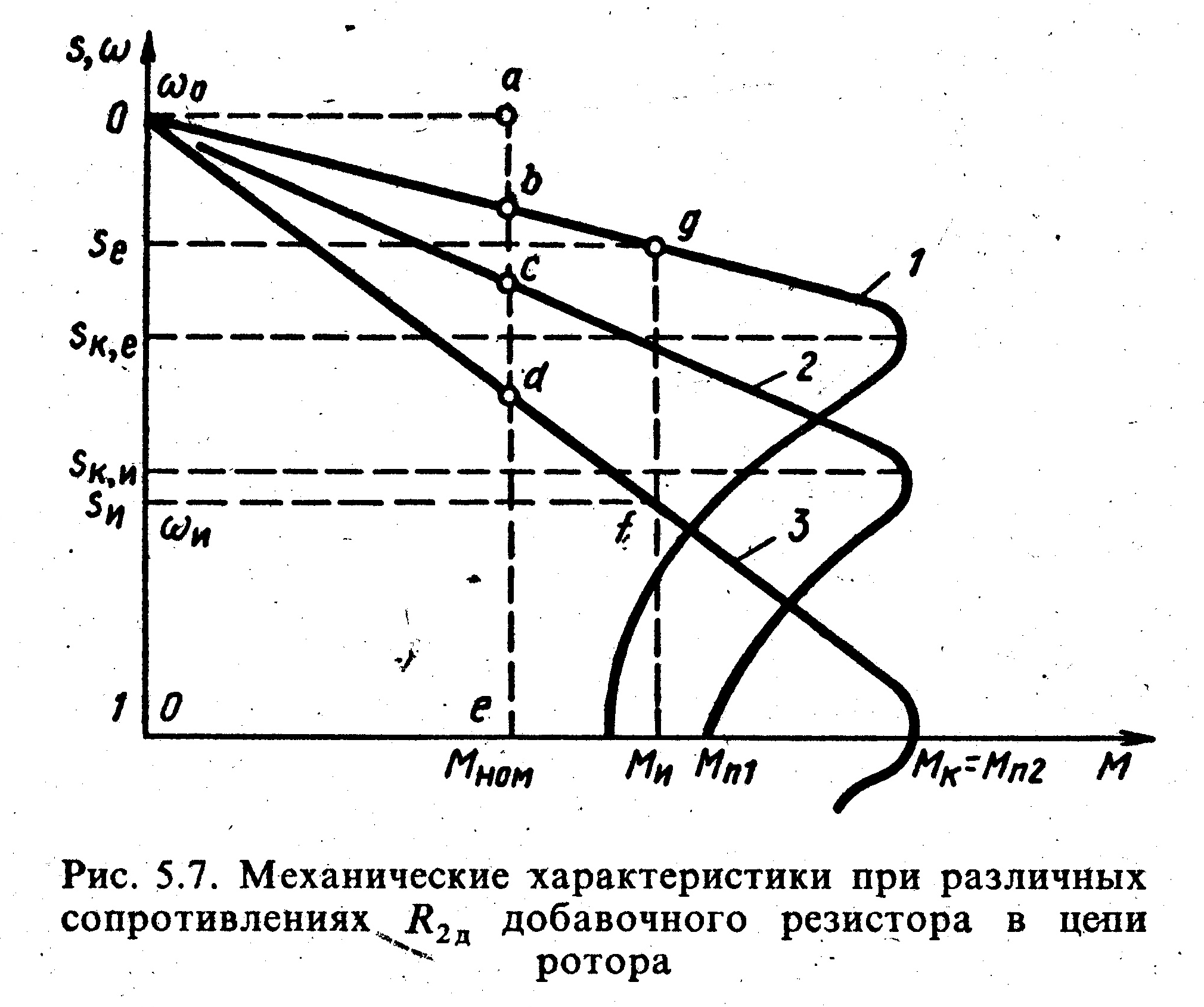
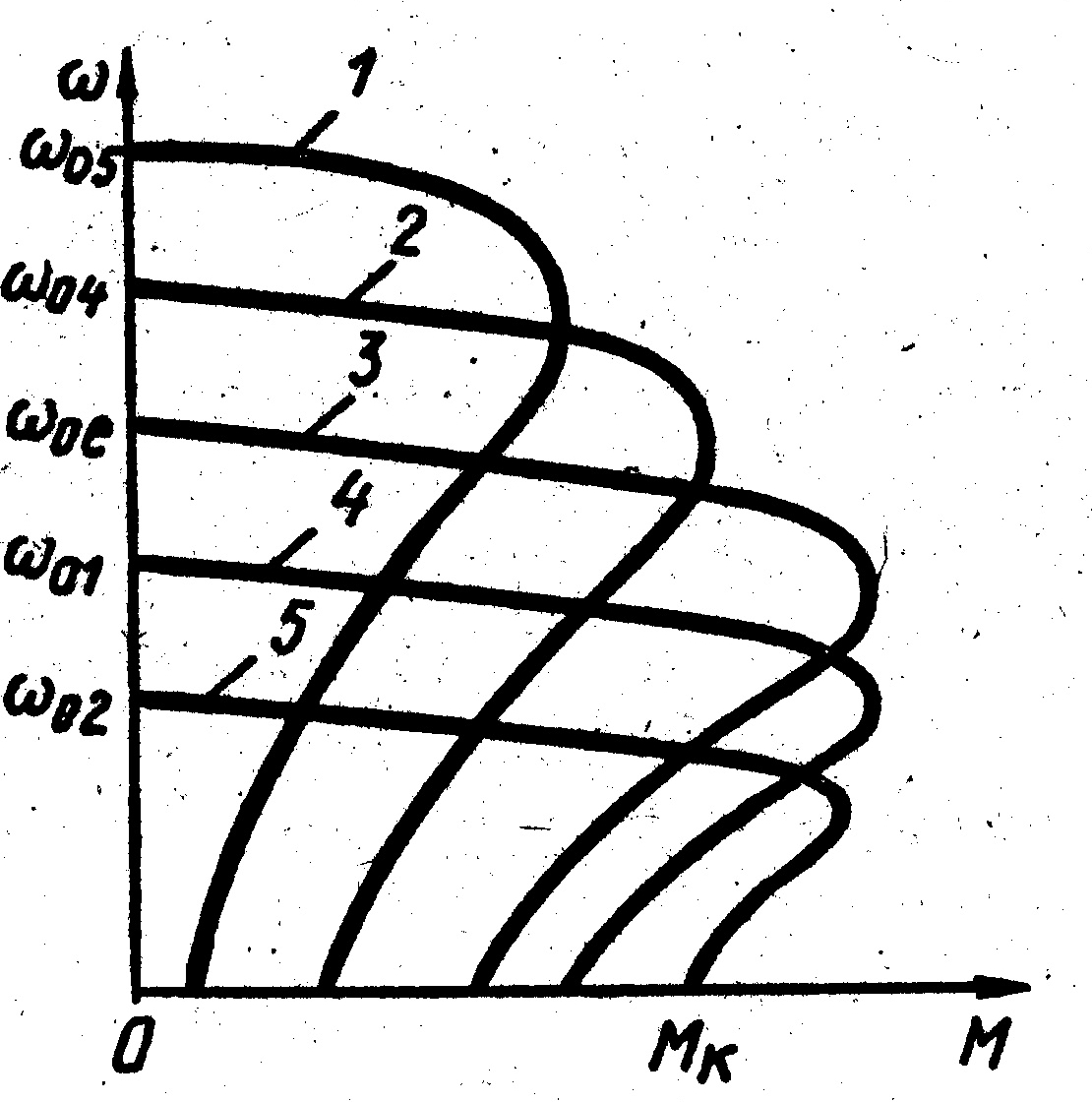
33. Влияние u, f, r ротора, на механическую характеристику ад. Рабочие характеристики ад.
Включение добавочных резисторов в цепь ротора. Этот способ применяется как с целью регулирования тока и момента АД, так и его скорости. Диапазон регулирования скорости небольшой — около 2—3, из-за снижения жесткости характеристик и роста потерь по мере его увеличения
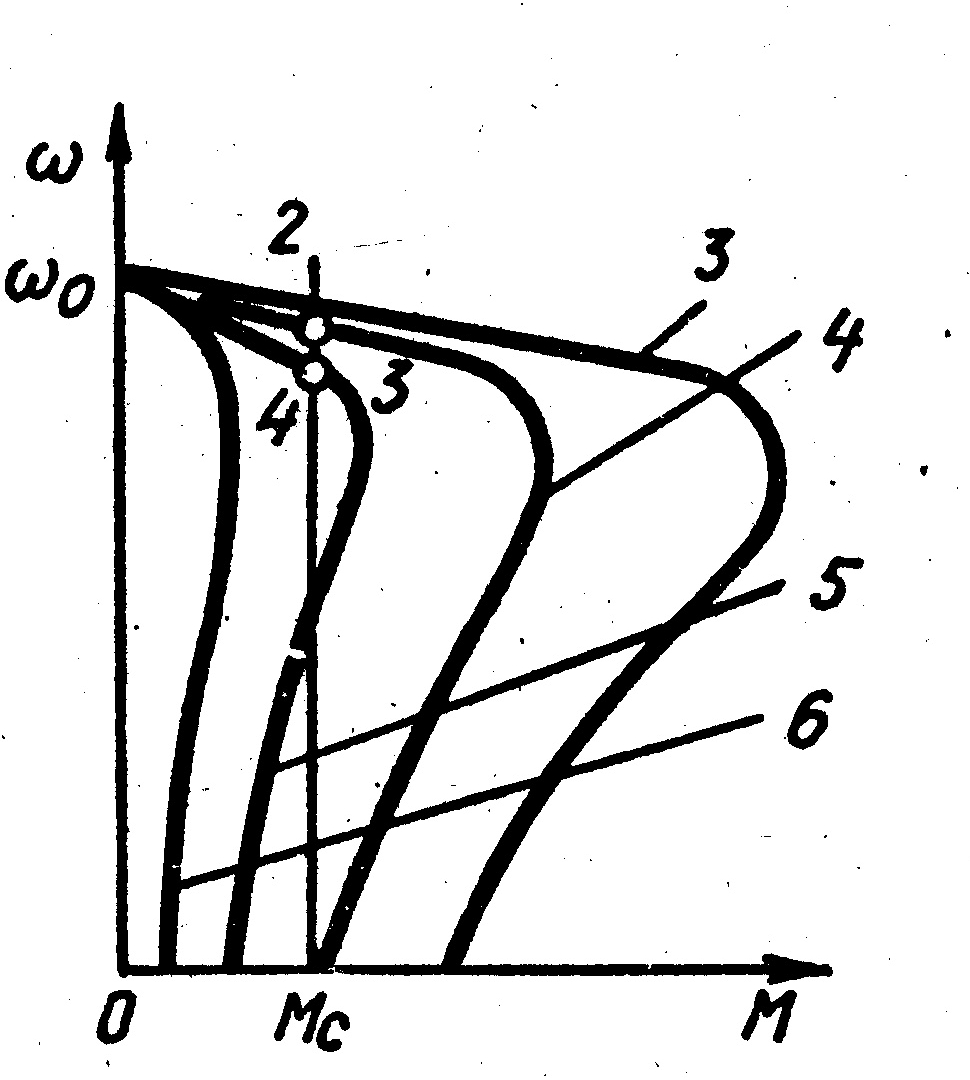 Изменение величины напряжения,
подводимого к статору АД, позволяет
осуществлять в статических и динамических
режимах регулирование его координат
с хорошими показателями и с помощью
относительно простых схем управления.
Этот же способ может быть использован
и для обеспечения наиболее экономичных
режимов работы АД. Изменение частоты.
Данный способ, называемый частотным,
является одним из наиболее перспективных
и широко внедряется в настоящее
время. Принцип его заключается в том,
что, изменяя частоту f питающего АД
напряжения, можно в соответствии с
выражением w0=2пf/p изменять его скорость
w0, получая, различные искусственные
характеристики.
Изменение величины напряжения,
подводимого к статору АД, позволяет
осуществлять в статических и динамических
режимах регулирование его координат
с хорошими показателями и с помощью
относительно простых схем управления.
Этот же способ может быть использован
и для обеспечения наиболее экономичных
режимов работы АД. Изменение частоты.
Данный способ, называемый частотным,
является одним из наиболее перспективных
и широко внедряется в настоящее
время. Принцип его заключается в том,
что, изменяя частоту f питающего АД
напряжения, можно в соответствии с
выражением w0=2пf/p изменять его скорость
w0, получая, различные искусственные
характеристики.
.
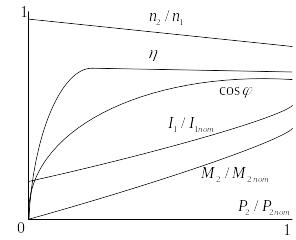
Рабочими характеристиками называются графические зависимости частоты вращения n2, полезного момента на валу M2, тока в фазе статора I1, КПД η и cosφ1 от полезной мощности Р2 при U1=const и f1=const. Характеристики строятся для зоны практически устойчивой работы двигателя, т.е. до скольжений (1,1-1,2) SH. Зависимость n2(P2) практически линейна и кривая слабо наклонена к оси абсцисс, т.к. SH≈(0,08-0,1) и момент практически линейно зависит от скольжения. Поскольку n2 изменяется мало, зависимость М2(Р2) также близка к линейной,Р2=М2∙ω 2 и, следовательно М2=Р2/ω 2 .Зависимость I1(P2) близка к прямой. Это свидетельствует о том, что активная составляющая тока пропорциональна полезной мощности Р2. Реактивная составляющая тока в диапазоне рабочих нагрузок меняется мало, т.к. она определяется током ХХ, который составляет 20-40 % от номинального тока. Поэтому зависимость I1(P2) выходит не из начала координат. Зависимость cosφ1=f(P2) показывает: при малых нагрузках cosφ1 имеет низкие значения (0,1-0,3). С увеличением нагрузки cosφ1 увеличивается, достигая максимума (0,75-0,9) при нагрузке, близкой к номинальной. С ростом нагрузки и мощности активная составляющая мало изменяется по сравнению с режимом ХХ. Зависимость η(Р2) имеет такой же характер, как и у трансформатора. Максимум КПД имеет место при нагрузках, немного меньших номинальных.