

24) Конструкция и работа пч со звеном постоянного тока при угле проводимости 120о.
25) Схема и работа линейного вт.
При любом включении обмоток вращающегося трансформатора уравнение, связывающее его выходное напряжение с углом поворота θ ротора, содержит функции sin θ и cos θ. Однако, выбирая определенным образом схемы включения обмоток, можно получить выходную характеристику в некотором ограниченном диапазоне изменения угла θ, близкую к линейной. Например, при небольшом изменении угла θ можно считать, что θ ≈ sin θ, и получать требуемую линейную зависимость Uвых = f(θ) от синусной обмотки. Однако в этом случае желательную точность линейной аппроксимации 0,1 % можно получить только при изменении угла θ в пределах ±4,5°. Поэтому использовать для линейного поворотного трансформатора одну синусную обмотку нерационально.
Более широкий диапазон изменения угла θ, в пределах которого выходная характеристика с достаточной точностью считается линейной, можно получить, если выходное напряжение представить в виде функции
(5.56)
Uвых = С sin θ/(1 + k cosθ).
Д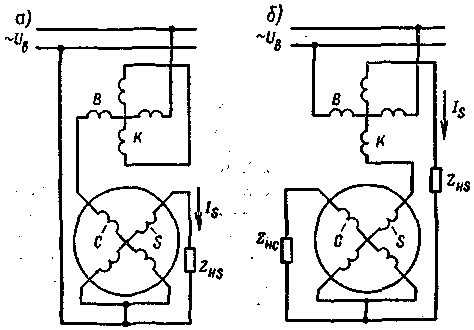 ля
получения указанной зависимости
применяют две схемы соединения обмоток
вращающегося трансформатора: с первичным
симметрированием (на статоре) и со
вторичным симметрированием (на роторе).
ля
получения указанной зависимости
применяют две схемы соединения обмоток
вращающегося трансформатора: с первичным
симметрированием (на статоре) и со
вторичным симметрированием (на роторе).
Рис. 5.29. Схемы линейного вращающегося трансформатора
Первичное симметрирование. В схеме первичного симметрирования (рис. 5.29, а) компенсационную обмотку К замыкают накоротко, а обмотку возбуждения В соединяют последовательно с косинусной обмоткой С ротора; концы их подключают к сети. К синусной обмотке S присоединяют нагрузочное сопротивление ZнS. Поскольку обмотка К замкнута накоротко, поперечный поток Фq = 0. Для цепи обмоток В и С составим уравнение
(5.57)
Úв + Éв + ÉС = Íв Zв + Íв ZС.
Так как ЭДС, индуцированные в обмотках В и С, совпадают по фазе, то они складываются алгебраически. Поэтому с учетом (5.44) и (5.46) сумма
(5.58)
Ев + ЕС = 4,44f1 (w1 kоб1 + w2 kоб2 cos θ)Фdm ,
откуда
Фdm = (Eв + ЕC )/[4,44f1 (w1 kоб1 + w2 kоб2 cos θ)].
Пренебрегая падениями напряжения в обмотках В, С и S и принимая Ев + ЕC ≈ Uв , получаем выходное напряжение
(5.60)
Uвых ≈ ES = kUв sin θ/(1 + k cos θ).
Если вращающийся трансформатор выполнен с k = 0,52 ÷ 0,56, то в пределах изменения угла ротора θ = ±55° выходное напряжение Uвых пропорционально этому углу.
26) Датчики проводимости.
27) Тиристорный преобразователь.
28) Схема и работа ВТ построителя.
29) Датчики термосопротивления.
Конструктивно датчики термосопротивления представляют собой катушку, намотанную очень тонкой (0,05 или 0,063) медной или платиновой проволокой. Катушка помещается внутрь завальцованной с одной стороны металлической гильзы с герметизирующей засыпкой или заливкой, имеющей электрическое сопротивление более 10 МОм. Выводы катушки соединены с клеммами, расположенными в головке датчика. Совокупность катушки, гильзы и клемм называется чувствительным элементом. Все остальное – корпусом или головкой датчика. По сути дела, датчик термосопротивления является переменным резистором, сопротивление которого меняется по определенному закону в зависимости от температуры среды. Закон изменения сопротивления зависит от градуировки датчика. С эксплуатационной точки зрения можно считать, что закон изменения сопротивления является линейной функцией.
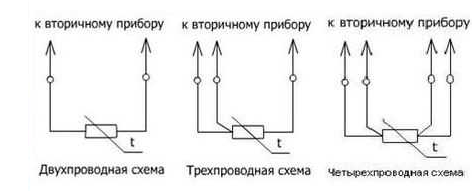
Подключение датчиков термосопротивления производиться по двух, трех или четырех проводной схеме. Двухпроводная схема подключения используется крайне редко, так как в этом случае сопротивление соединительных проводов вносит существенную погрешность в измерение. Наиболее часто используется трехпроводная схема подключения
Погрешность измерения температуры ΔТ при применении двухпроводной линии связи датчика термосопротивления с вторичным прибором может быть рассчитана по следующей формуле.
![]()
![]()
Увеличение длины линии связи L приводит к возрастания погрешности, применение провода с большим сечение жилы S приводит к уменьшению погрешности. Удельное сопротивление меди ρ равно 0,0171 Ом*мм2/м. Через множитель 2 учитывается суммарное сопротивление обоих (двух) жил кабеля.

Коэффициент К зависит от градуировки применяемого датчика термосопротивления. Коэффициенты К, приведенные в таблице, были рассчитаны для W100=1,391 (платиновые датчики) и W100=1,428 (медные датчики).