

10) Передаточная функция дпт при управлении цепи якоря.
Уравнение Даламбера-Эйлера:
![]() ;
; ![]()
![]()
![]() ;
; ![]()
![]()
![]()
Передаточная функция по скорости:

![]()
![]()
![]()
11) Преобразователь координат 2 в 3.
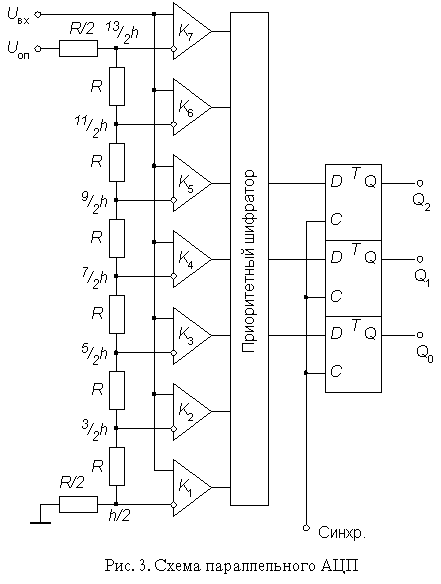
12)Ацп параллельного типа
Параллельные АЦП прямого преобразования,[6] полностью параллельные АЦП, содержат по одному компаратору на каждый дискретный уровень входного сигнала. В любой момент времени только компараторы, соответствующие уровням ниже уровня входного сигнала, выдают на своём выходе сигнал превышения. Сигналы со всех компараторов поступают либо прямо в параллельный регистр, тогда обработка кода осуществляется программно, либо на аппаратный логический шифратор, аппаратно генерирующий нужный цифровой код в зависимости от кода на входе шифратора. Данные с шифратора фиксируются в параллельном регистре. Частота дискретизации параллельных АЦП, в общем случае, зависит от аппаратных характеристик аналоговых и логических элементов, а также от требуемой частоты выборки значений.
Параллельные АЦП прямого преобразования - самые быстрые, но обычно имеют разрешение не более 8 бит, так как влекут за собой большие аппаратные затраты (2n − 1 = 28 − 1 = 255 компараторов). АЦП этого типа имеют очень большой размер кристалла микросхемы, высокую входную ёмкость, и могут выдавать кратковременные ошибки на выходе. Часто используются для видео или других высокочастотных сигналов, а также широко применяются в промышленности для отслеживания быстро изменяющихся процессов в реальном времени.
13) Компенсационные измерительные схемы.
14)Двухфазный ад
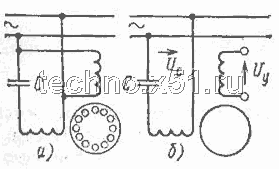
Рис. 1. Двухфазные асинхронные двигатели:
а — с короткозиминутым ротором; б — с полым ротором
Вращающиеся магнитные поля могут быть созданы и двухфазными обмотками, если обе фазы этих обмоток пространственно смещены на 90° друг относительно друга. Если фазы обмотки питать двумя токами, смещенными на 90° по фазе, то получается, как и в трехфазном электродвигателе, вращающееся магнитное поле.
В двухфазном электродвигателе создается вращающий момент, обусловленный токами, вызванными вращающимся магнитным полем в стержнях ротора электродвигателя. Ротор получает ускорение до тех пор, пока он — как и в трехфазном асинхронном двигателе — не достигнет определенной конечной частоты вращения, которая ниже частоты вращения поля.
Если обе фазы обмотки ротора питать от одной и той же сети однофазного тока, то сдвиг фаз в одной из обмоток, необходимый для получения вращающегося поля, может быть реализован путем подключения конденсатора с достаточной емкостью. На рис.1, а показана схема двухфазного асинхронного двигателя с конденсатором при питании от сети переменного тока.
В настоящее время расширилась сфера применения двуфазного асинхронного двигателя в виде электродвигателя с полым ротором. В таком электродвигателе вместо обычного короткозэмкнутого ротора применяется алюминиевый цилиндр, который может вращаться в воздушном зазоре между внешним и внутренним статорами (рис.1б).
Вращающееся поле вызывает в алюминиевом цилиндре вихревые токи, которые, взаимодействуя с магнитным полем в воздушном зазоре, создают вращающий момент. Цилиндр достигает конечной асинхронной частоты вращения, которая соответствует нагрузке на валу.
Небольшой момент инерции ротора электродвигателя обусловливает благоприятные рабочие характеристики. Электродвигатели с полым ротором рассчитаны прежде всего на небольшие мощности и применяются для автоматического регулирования в компенсационных и мостовых схемах. Одна из обмоток вместе с конденсатором подключается к сети с напряжением, а на вторую обмотку подается управляющее напряжение.