

1)Передаточная функция двигателя по обмотке возбуждения.
2) Преобразователь координат α-β в X-y
3) Cкалярное управление ад
Скалярное управление или U/f-регулирование асинхронным двигателем – это изменение скорости двигателя путем воздействия на частоту напряжения на статоре при одновременном изменении модуля этого напряжения. При U/f-регулировании частота и напряжение выступают как два управляющих воздействия, которые обычно регулируются совместно. При этом частота принимается за независимое воздействие, а значение напряжения при данной частоте определяется исходя из того, как должен изменяться вид механических характеристик привода при изменении частоты, т.е., из того, как должен меняться в зависимости от частоты критический момент. Для реализации такого закона регулирования необходимо обеспечить постоянство соотношения U/f=const, где U-напряжение на статоре, а f-частота напряжения статора.
При постоянстве перегрузочной способности номинальные коэффициент мощности и к.п.д. двигателя на всем диапазоне регулирования частоты вращения практически не изменяются.
К законам U/f-регулирования можно отнести законы, связывающие величины и частоты питающего двигатель напряжения (U/f=const, U/f2=const и другие). Их достоинством является возможность одновременного управления группой электродвигателей. Скалярное управление используется для большинства практических случаев применения частотного электропривода с диапазоном регулирования частоты вращения двигателя без использования датчика обратной связи до 1:40. Алгоритмы скалярного управления не позволяют реализовать контроль и управление вращающим моментом электродвигателя, а также режим позиционирования. Наиболее эффективная область применения данного способа управления: вентиляторы, насосы, конвейеры и т.д.
4) Вентильный двигатель
Вентильный электродвигатель — это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора.
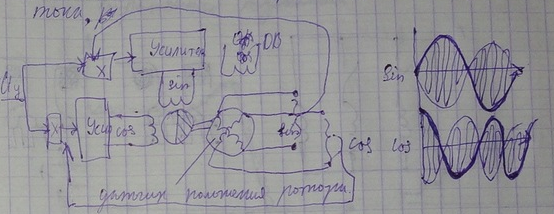
В вентильном двигателе (ВД) индуктор находится на роторе (в виде постоянных магнитов), якорная обмотка находится на статоре (синхронный двигатель). Напряжение питания обмоток двигателя формируется в зависимости от положения ротора. Если в двигателях постоянного тока для этой цели использовался коллектор, то в вентильном двигателе его функцию выполняет полупроводниковый коммутатор (датчик положения ротора (ДПР) с инвертором).
Основным отличием ВД от синхронного двигателя является его самосинхронизация с помощью ДПР, в результате чего у ВД, частота вращения поля пропорциональна частоте вращения ротора.
Статор имеет традиционную конструкцию и похож на статор асинхронной машины. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки,уложенной в пазы по периметру сердечника. Количество обмоток определяет количество фаз двигателя. Для самозапуска и вращения достаточно двух фаз — синусной и косинусной. Обычно ВД трёхфазные.
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до восьми пар полюсов с чередованием северного и южного полюсов.
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрический, индуктивный, на эффекте Холла, и т. д. Наибольшую популярность приобрели датчики Холла и фотоэлектрические, так как они практически безинерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
5) ЦАП R-2R с суммированием напряжений
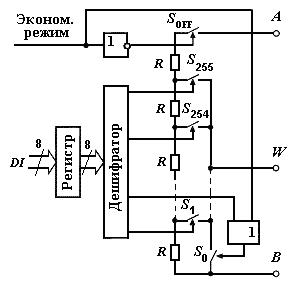
Блок-схема ЦАП с суммированием напряжений.
— устройство, преобразующее входной аналоговый сигнал в дискретный код (цифровой сигнал). Обратное преобразование осуществляется при помощи ЦАП (цифро-аналогового преобразователя, DAC).
Основу преобразователя составляет резистивная матрица из 256 резисторов равного сопротивления, соединенных последовательно. Вывод W через ключи S0 – S255 может подключаться к любой точке этой цепи в зависимости от входного кода. Входной двоичный код D преобразуется дешифратором 8 x 256 в унитарный позиционный код, непосредственно управляющий ключами. Если приложить напряжение VAB между выводами А и В, то напряжение между выводами W и В составит(7.5):
VAB=VWB*D
Достоинством данной схемы является высокая линейность и гарантированная монотонность переходной характеристики. ЦАП этого типа можно использовать в качестве резистора, подстраиваемого цифровым кодом. При подаче активного уровня на вход “Экономичный режим” происходит размыкание ключа SOFF и замыкание ключа S0.
Схема имеет вход сброса, которым ЦАП можно установить на середину шкалы. Недостаток схемы – необходимость большого количества согласованных резисторов. Так как в этой схеме программируется сопротивление между выводами, то ее можно отнести программируемым, или цифровым потенциометрам.
ЦАП с суммированием напряжений являются также основой для построения многоразрядных ЦАП. Типичным примером может служить 16-разрядный перемножающий ЦАП с выходом по напряжению AD569 фирмы Analog Devices. Основой ЦАП являются две цепочки по 256 согласованных резисторов – левая и правая. Восемь старших разрядов входного слова подаются на левую цепочку и выбирают один из резисторов (сегмент). Через два буферных усилителя напряжение на выбранном сегменте прикладывается к правой цепочке, на которую подаются восемь младших разрядов и тоже выбирают один из своих резисторов. Напряжение на входе выходного буферного усилителя равно сумме напряжений на выходах делителей.
Примером другой комбинированной схемы, в которой четыре старших разряда преобразуются с помощью последовательной резистивной цепи, а младшие – с помощью ЦАП на основе матрицы R-2R, является 16-разрядный преобразователь AD7849B.