

6)Оу и регуляторы на их основе
Операционный усилитель (ОУ, OpAmp) — усилитель постоянного тока с дифференциальным входом и, как правило, единственным выходом, имеющий высокий коэффициент усиления. ОУ почти всегда используются в схемах с глубокой отрицательной обратной связью, которая, благодаря высокому коэффициенту усиления ОУ, полностью определяет коэффициент передачи полученной схемы.
Аналоговые регуляторы в системах подчиненного управления электроприводами строятся на основе операционных усилителей (ОУ) — усилителей постоянного тока с высоким входным и очень низким выходным сопротивлениями.
Для получения пропорционального регулятора (П-регулятора) на вход и в цепь обратной связи ОУ включают резисторы; интегрального регулятора (И-регулятора) во входную цепь включает резистор, а в цепь обратной связи — конденсатор; ПИ-регулятора во входную цепь-резистор, а в цепь обратной связи — последовательно соединенные резистор и конденсатор. ПИД-регулятор может быть выполнен на одном усилителе с помощью активно-емкостных цепей на входе и в цепи обратной связи.
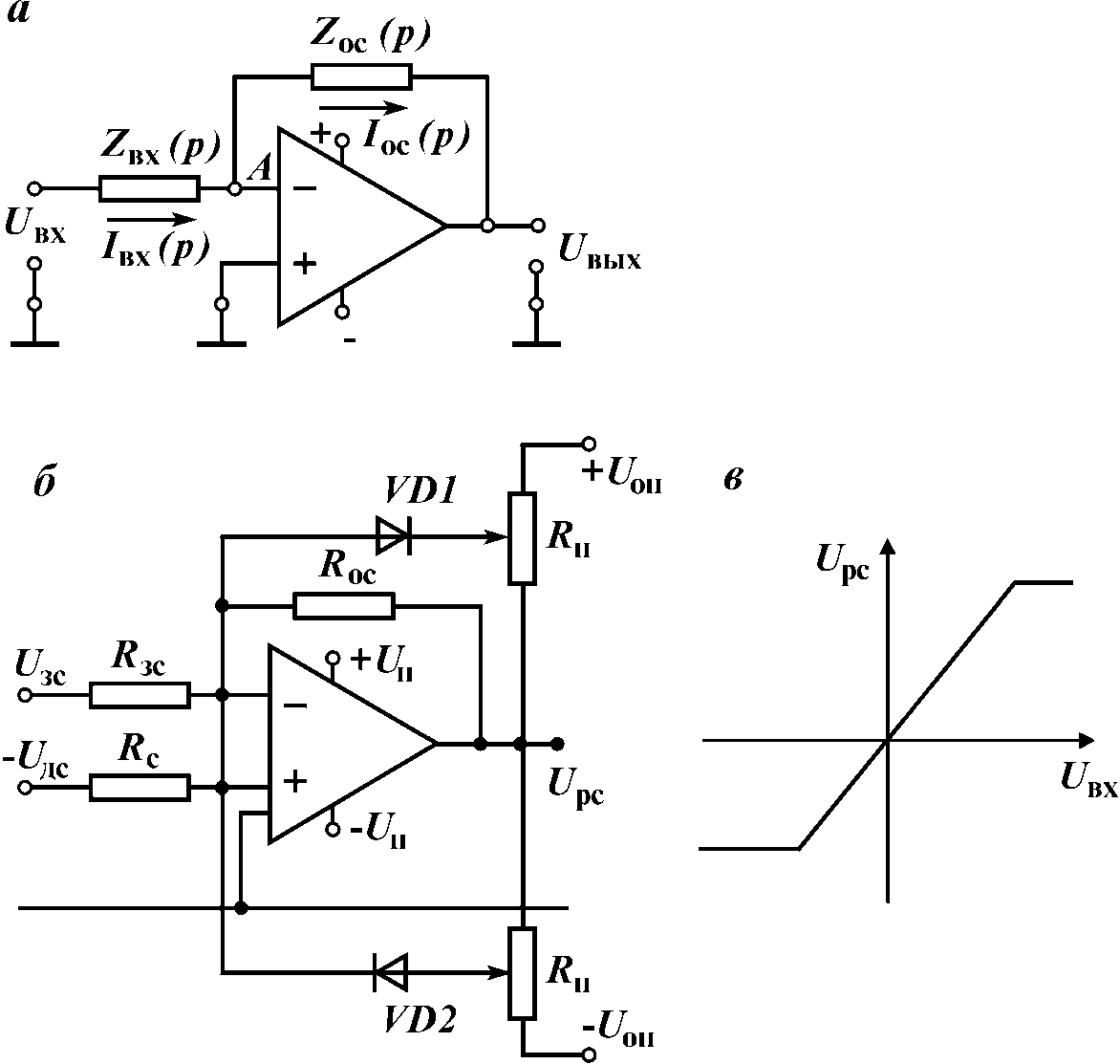
Рис. 1. Структура аналогового регулятора, выполненного на операционном усилителе (а). Схема пропорционального регулятора с управляемым ограничением выходного сигнала (б). Характеристика вход-выход регулятора с управляемым ограничением выходного сигнала (в)
7,8) Управление ад при постоянстве потокосцепления
общий принцип моделирования и построения системы управления АД заключается в том, что для этого используется система координат, постоянно ориентированная по направлению какого-либо вектора, определяющего электромагнитный момент. Тогда проекция этого вектора на другую ось координат и соответствующее ей слагаемое в выражении для электромагнитного момента будут равны нулю, и формально оно принимает вид, идентичный выражению для электромагнитного момента двигателя постоянного тока
электромагнитный момент определяется через произведение потокосцепления ротора на ток ротора в виде
![]()
для
построения системы векторного управления
АД нужно выбрать вектор, относительно
которого будет ориентирована система
координат, и соответствующее выражение
для электромагнитного момента, а затем
определить, входящие в него величины
для цепи статора и/или ротора. Например,
в случае ориентации по потокосцеплению
ротора (![]() )
момент можно представить как
)
момент можно представить как
9)Конструкция ротора шагового двигателя
Конструктивно шаговые электродвигатели состоят из статора, на котором расположены обмотки возбуждения, и ротора, выполненного из магнито-мягкого (ферромагнитного) материала или из магнито-твёрдого (магнитного) материала. Шаговые двигатели с магнитным ротором позволяют получать бо́льший крутящий момент и обеспечивают фиксацию ротора при обесточенных обмотках.
Гибридные двигатели сочетают в себе лучшие черты двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами.
Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Ротор разделен на две части, между которыми расположен цилиндрический постоянный магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи.