

48. Характерные особенности приводов станков в зависимости от их типов
1) Приводом называется совокупность механизмов, получающих энергию извне и
передающих ее рабочим элементам станка, в результате чего последние получают
необходимые движения.
В современных станках почти исключительно применяется индивидуальный привод, при
котором каждая машина или даже •отдельные узлы приводятся в движение отдельным
электродвигателем.
2) Привод не только передает движение, обычно он обеспечивает также и изменение
скорости перемещения рабочих органов. Регулирование скорости может быть плавным
(бесступенчатым) и ступенчатым—привод имеет известное число вполне определенных
скоростей.
3) Бесступенчатое регулирование .скорости выполняется либо за счет изменения числа
оборотов электродвигателя, либо за счет применения гидравлических механизмов, в
которых скорость движения регулируется путем изменения количества поступающего
масла, либо механическими бесступенчатыми приводами, так называемыми
вариаторами.
4) Ступенчатое изменение скорости производится механизмами с зубчатыми колесами,
ременными и цепными передачами, переключение которых позволяет получить
различные и вполне
определенные скорости движения рабочих органов. Сочетание этих механизмов в
различных вариантах дает возможность получить коробки скоростей (в механизмах
главного движения) и коробки подач (механизмы привода подачи) со значительным
числом скоросте
53. Типовые динамические звенья
Совокупность элементарных, универсальных математических функций наиболее часто используемых при построении динамических моделей реальных объектов. Представляют собой ДУ, записанные в особой форме – в виде ПФ связывающих входной и выходной сигналы звеньев. Обычно ПФ записываются не для временного домена, а для домена Лапласа, связывая в этом варианте не сигналы (т.е. не функции времени), а их изображения.
Наличие нулевых корней в числителе или знаменателе ПФ типовых звеньев – это признак для разбиения последних на три группы:
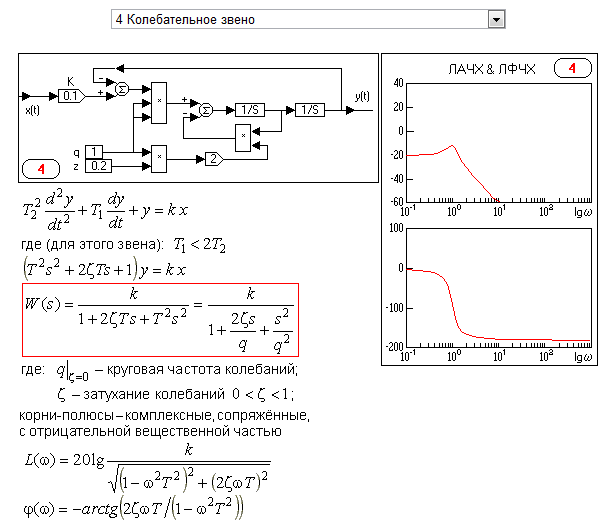
Позиционные звенья: 1, 2, 3, 4, 5, – не имеют нулевых корней, и, следовательно, в области низких частот (т.е. в установившемся режиме), имеют коэффициент передачи равный k.
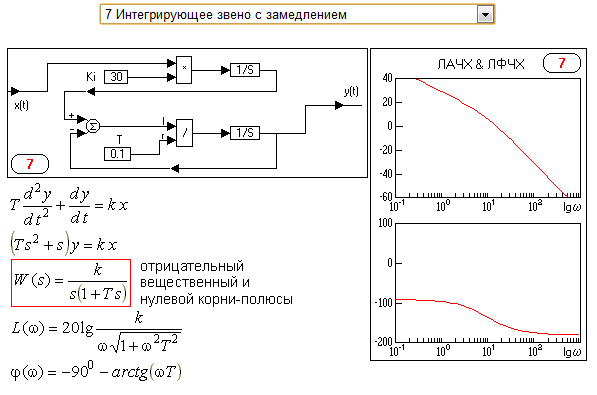
Интегрирующие звенья: 6, 7, 8, – имеют нулевой корень-полюс, и, следовательно, в области низких частот, имеют коэффициент передачи, стремящийся к бесконечности.
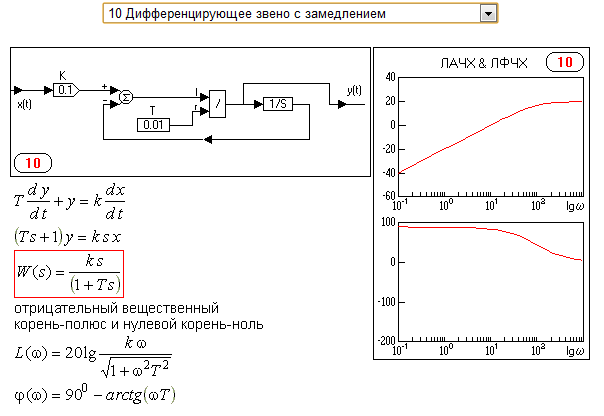
Дифференцирующие звенья: 9, 10 – имеют нулевой корень-ноль, и, следовательно, в области низких частот, имеют коэффициент передачи, стремящийся к нулю.

54. Характеристики и передаточная функция дифференцирующего дз

55. Характеристики и передаточная функция интегрирующего дз
56. Характеристики и передаточная функция колебательного дз
57, 58 Единичная ступенчатая и переходная функции, Единичная импульсная ( -функция) и импульсная переходная функции. Связь -функции с единичной ступенчетой.
Единичная ступенчатая функция – 1(t)
Математическая функция, заданная условиями: 1(t)=0 при t<0, и 1(t)=1 приt>0. Для автоматических систем является распространенным видом входного воздействия. Как правило, подобные воздействия сопровождают процессы включения систем и вызывают переходы от одного установившегося состояния к другому.
![]() Дельта-функция
Дирака – δ(t)
Дельта-функция
Дирака – δ(t)
Математическая функция, заданная условиями: δ(t)→∞ при t=0, и δ(t)=0 приt≠0, – т.е. это импульс с бесконечной амплитудой, площадь которого принимается равной 1. Для автоматических систем является менее распространенным видом входного воздействия, чем единичная ступенчатая функция. Однако для теоретического описания последних имеет существенное значение. Подобные воздействия характерны для радарных комплексов, описывают передачу импульса при упругом взаимодействии и т.д.
Из определений функций 1(t) и δ(t) очевидна связь между ними:
(1)
1(t)=∫δ(t)dt и δ(t)=1′(t).
Единичная ступенчатая функция 1(t) легка для практической реализации с высокой точностью, однако дельта-функцию Дирака δ(t) реализовать сложнее. Для теоретического описания систем и их моделирования ее можно грубо представить с помощью двух ступенчатых функций:
(2)
δ(t)≈N1(t)−N1(t−ε),
где: N – амплитуда функций, ε – время, на которое запаздывает вторая ступенчатая функция, при этом Nε=1 и ε→0.
![]() Переходная
функция или характеристика – h(t)
Переходная
функция или характеристика – h(t)
Переходный процесс на выходе типового звена или линейной системы, возникающий при подаче на вход единичной ступенчатой функции 1(t).
![]() Функция
веса – w(t)
Функция
веса – w(t)
Переходный процесс на выходе типового звена или линейной системы, возникающий при подаче на вход короткого импульса, который, в приближении, можно рассматривать как дельта-функцию Дирака δ(t).
В виду независимости присущих линейным системам свойств от внешних воздействий и наличия связи (1) между последними, подобное же отношение существует и для соответствующих типовых реакций:
h(t)=∫w(t)dt и w(t)=h′(t).
Докажем эту взаимосвязь подав на систему грубую реализацию дельта-функции (2). В этом случае переходный процесс на выходе можно представить следующей суперпозицией:
y(t)=Nh(t)−Nh(t−ε),
которая будет являться функцией веса, предел которой (при ε→0) будет равен производной от переходной функции:
w(t)=limε→0(εN(h(t)−h(t−ε))/ε)=h′(t), – напомним: Nε=1.
Функция веса связана с передаточной функцией преобразованием Лапласа:
W(s)=0∞∫w(t)e−stdt.
Переходная функция связана с передаточной функцией преобразованием Карсона:
W(s)=s×0∞∫h(t)e−stdt.
Для произвольного входного воздействия, переходный процесс на выходе линейной системы может быть определен на основании интеграла Дюамеля-Карсона, если известны типовые реакции:
h(t):y(t)=x(0)h(t)+0t∫x′(τ)h(t−τ)dτ;
w(t):y(t)=0t∫x(τ)w(t−τ)dτ, – так же "Интеграл свертки";
где: τ – вспомогательное время интегрирования.