

§ 1.8. Разветвления по входу и выходу.
Разветвления можно осуществить следующим способом (Рис. 1.15.).
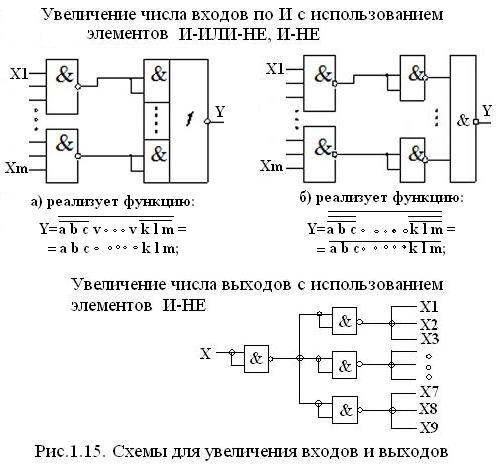
В любом случае надо учитывать:
Нагрузочные токи и емкости, которые влияют на характеристики схемы.
Каждая линейка (каскад) элементов инвертирует сигнал и вносит дополнительную задержку tр его распространения.
При проектировании схем, также могут вводиться оценочные параметрыдля сравнения узлов:
- суммарная задержка сигнала n·tр, где n – число каскадов,
- число входов М, число выходов Квых, число оборудования Q,
- стоимость.
§ 1.9. Гонки.
В качестве примера образования гонок рассмотрим схему и временные диаграммы ее работы, приведенные на Рис. 1.16.
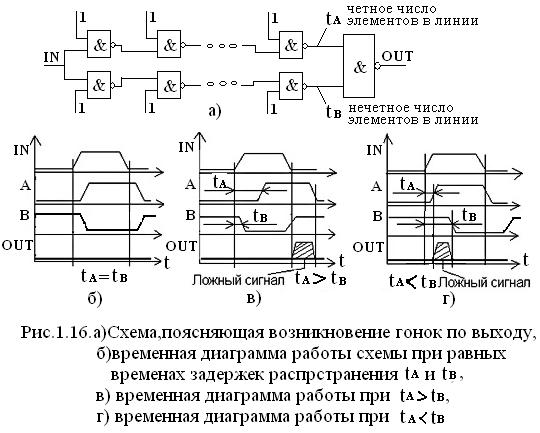
Анализируя данную схему методами алгебры логики можно утверждать, что на выходе OUT всегда должен быть «0». В реальности на выходе OUT может появиться ложный сигнал, поскольку времена задержки распространения по цепям tА и tB могут быть разными. Такое явление получило название «гонки» или «состязания» (races).
При достаточно большой разнице между временами tА и tB ложный сигнал может быть воспринять последующей схемой как истинный логический.
Методы борьбы с гонками (3 основных).
Тактирование (наиболее распространенное). Схема и временная диаграмма ее работы, поясняющая суть метода, приведены на Рис. 1.17.
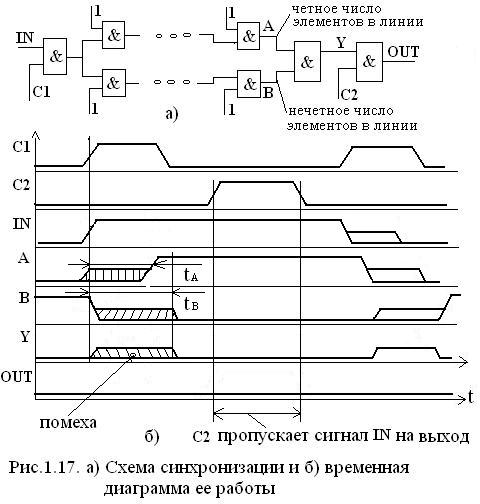
По всему устройству разводится единая серия тактирующих (синхронизирующих) сигналов, в частности двухфазной синхронизации: С1 и С2, сдвинутых относительно друг друга на полпериода.
Суть метода.
Входной сигнал IN привязывается к синхросигналу С1, то есть входной сигнал проходит по цепям А и В только между двумя соседними С1 (такая привязка сигналов к синхросигналам будет рассмотрена в разделе синхронизация в цифровых устройствах).
Далее сигнал IN может задерживаться по цепям А и В с разными временами распространения, и возникать помеха, но на выход OUT она не попадает, так как элемент И на выходе У закрыт до прихода С2, который подается уже после окончания всех переходных процессов в цепях А и В.
Очевидное требование к С1 и С2:
Временной интервал между С1 и С2 (tсдвига) должен превышать самую большую возможную задержку распространения входного сигнала IN в цепях А и В.
Обычно такой способ борьбы с гонками (и с влиянием переходных процессов на выходах элементов) называют стробированием, а сигналы С1 и С2 – стробами.
Вторым методом борьбы с гонками является построение противогоночных схем.
Как правило в противогоночных схемах вводятся дополнительные связи и элементы так, чтобы нежелательные параллельные пути запирались самим входным сигналом еще до достижение им опасной развилки тракта. Примером такого подхода может служить схема JK-триггера с обратными связями в определенных элементах (JK-триггер рассмотрим позже).
Полезным свойством противогоночных схем оказывается их способность обрабатывать данные по мере их поступления, то есть без привязки к синхронным сигналам, что увеличивает их быстродействие.
Учет минимального времени задержки в цепях. Сложная задача. Во-первых, сложно определять цепи возможного распространения входного сигнала, во-вторых, не всегда известны минимальные времена срабатывания элементов и задержки в линиях, следовательно вероятность появления гонок всегда остается.
Проблема гонок в цифровой технике является весьма серьезной. Сами гонки часто являются причиной непонятных сбоев в работе устройств. Изменение окружающей температуры, старение элементов – все это приводит к изменению времен задержек и ,следовательно, появлению гонок.
Последние два метода применяются редко.
Подробнее о гонках можно прочесть в литературе:
Лазер И.М., Шубарев В.А «Устойчивость цифровых микроэлектронных устройств», М.Радио и связь 1983 г.
«Автоматное управление асинхронными процессами в ЭВМ» под ред. Варшавского В.М. 1986 г.
Гонки по входу (Рис. 1.18.)
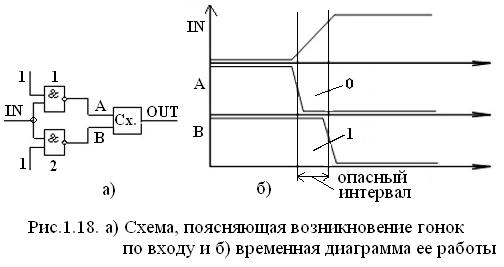
Возникают вследствие наличия разброса по уровню срабатывания у разных элементов и при излишне пологом фронте сигнала IN.
В интервале «0» - истина, а в интервале «1» - ложь. Результат, принятый последующей схемой будет неверным. Такое явление называется «гонками по входу». Методом борьбы с таким явлением лучше всего является стробирование с установкой на входе схемы конъюнктора.