

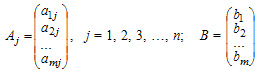
Векторная форма записи
Система уравнений может быть записана в векторном виде:
A1x1 + A2x2 + ... + Anxn =B
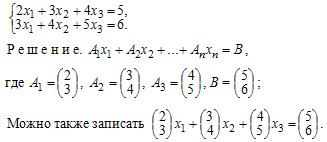
Пример 1. Записать в векторном виде.
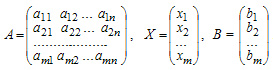
Матричная форма записи
В матричной записи система линейных уравнений может быть записана следующим образом:
AX=B
Пример 2: Записать в матричном виде систему из предыдущего примера
![]()
Однородные системы линейных уравнений
Однородная система линейных уравнений AX = 0 всегда совместна. Она имеет нетривиальные (ненулевые) решения, если r = rank A < n.
Для однородных систем базисные переменные (коэффициенты при которых образуют базисный минор) выражаются через свободные переменные соотношениями вида:
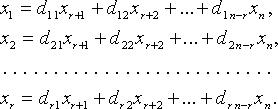
Тогда n - r линейно независимыми вектор-решениями будут:
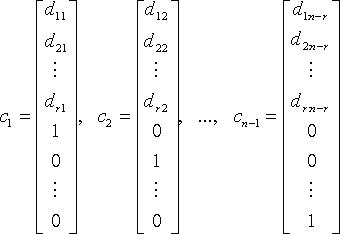
а любое
другое решение является их линейной
комбинацией. Вектор-решения ![]() образуют
нормированную фундаментальную систему.
образуют
нормированную фундаментальную систему.
В
линейном пространстве ![]() множество
решений однородной системы линейных
уравнений образует подпространство
размерности n
- r;
-
базис этого подпространства.
множество
решений однородной системы линейных
уравнений образует подпространство
размерности n
- r;
-
базис этого подпространства.
Система m линейных уравнений с n неизвестными (или, линейная система) в линейной алгебре — это система уравнений вида
|
|
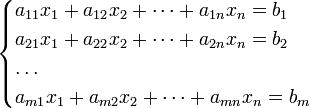
Здесь x1, x2, …, xn — неизвестные, которые надо определить. a11, a12, …, amn — коэффициенты системы — иb1, b2, … bm — свободные члены — предполагаются известными. Индексы коэффициентов (aij) системы обозначают номера уравнения (i) и неизвестного (j), при котором стоит этот коэффициент, соответственно[1].
Система (1) называется однородной, если все её свободные члены равны нулю (b1 = b2 = … = bm = 0), иначе —неоднородной.
Система (1) называется квадратной, если число m уравнений равно числу n неизвестных.
Р ешение системы
(1) — совокупность n чисел c1, c2,
…, cn,
таких что подстановка каждого ci вместо xi в
систему (1) обращает все её уравнения в
тождества.
ешение системы
(1) — совокупность n чисел c1, c2,
…, cn,
таких что подстановка каждого ci вместо xi в
систему (1) обращает все её уравнения в
тождества.
Система (1) называется совместной, если она имеет хотя бы одно решение, и несовместной, если у неё нет ни одного решения.
Совместная система вида (1) может иметь одно или более решений.
Решения c1(1), c2(1), …, cn(1) и c1(2), c2(2), …, cn(2) совместной системы вида (1) называются различными, если нарушается хотя бы одно из равенств:
c1(1) = c1(2), c2(1) = c2(2), …, cn(1) = cn(2). |
Совместная система вида (1) называется определённой, если она имеет единственное решение; если же у неё есть хотя бы два различных решения, то она называется неопределённой. Если уравнений больше, чем неизвестных, она называется переопределённой.
33) Решение систем линейных уравнений
Решение матричных уравнений ~ Метод Гаусса
Способы решения систем линейных уравнений делятся на две группы:
точные методы, представляющие собой конечные алгоритмы для вычисления корней системы (решение систем с помощью обратной матрицы, правило Крамера, метод Гаусса и др.),
итерационные методы, позволяющие получить решение системы с заданной точностью путем сходящихся итерационных процессов (метод итерации, метод Зейделя и др.).
Вследствие неизбежных округлений результаты даже точных методов являются приближенными. При использовании итерационных методов, сверх того, добавляется погрешность метода.
Эффективное применение итерационных методов существенно зависит от удачного выбора начального приближения и быстроты сходимости процесса.
Решение матричных уравнений
Рассмотрим систему n линейных алгебраических уравнений относительно n неизвестных х1, х2, …, хn:
|
(13) |
Рисунок 8.
![]()
В соответствии с правилом умножения матриц рассмотренная система линейных уравнений может быть записана в матричном виде
Ах = b, |
(14) |
где:
|
(15) |
 .
.Матрица А, столбцами которой являются коэффициенты при соответствующих неизвестных, а строками - коэффициенты при неизвестных в соответствующем уравнении, называется матрицей системы; матрица-столбец b, элементами которой являются правые части уравнений системы, называется матрицей правой части или просто правой частью системы. Матрица-столбец х, элементы которой - искомые неизвестные, называется решением системы.
Если матрица А - неособенная, то есть det A не равен 0 то система (13), или эквивалентное ей матричное уравнение (14), имеет единственное решение.
В самом деле, при условии det A не равно 0 существует обратная матрица А-1. Умножая обе части уравнения (14) на матрицу А-1получим:
|
(16) |
Формула (16) дает решение уравнения (14) и оно единственно.
Системы линейных уравнений удобно решать с помощью функции lsolve.
lsolve(А, b)
Возвращается вектор решения x такой, что Ах = b.
Аргументы:
А - квадратная, не сингулярная матрица.
b - вектор, имеющий столько же рядов, сколько рядов в матрице А.
На Рисунке 8 показано решение системы трех линейных уравнений относительно трех неизвестных.
Метод Гаусса
Метод Гаусса, его еще называют методом Гауссовых исключений, состоит в том, что систему (13) приводят последовательным исключением неизвестных к эквивалентной системе с треугольной матрицей:
|
|
решение которой находят по рекуррентным формулам:
. |
(17) |
В матричной записи это означает, что сначала (прямой ход метода Гаусса) элементарными операциями над строками приводят расширенную матрицу системы к ступенчатому виду:
а затем (обратный ход метода Гаусса) эту ступенчатую матрицу преобразуют так, чтобы в первых n столбцах получилась единичная матрица:
 .
.
Последний, (n + 1) столбец этой матрицы содержит решение системы (13).
В Mathcad прямой и обратный ходы метода Гаусса выполняет функция rref(A).
На Рисунке 9 показано решение системы линейных уравнений методом Гаусса, в котором используются следующие функции:
rref(A)
Возвращается ступенчатая форма матрицы А.
augment(A, В)
Возвращается массив, сформированный расположением A и В бок о бок. Массивы A и В должны иметь одинаковое число строк.
submatrix(A, ir, jr, ic, jc)
Возвращается
субматрица, состоящая из всех элементов
с ir по jr и
столбцах с ic по jc. Удостоверьтесь,
что ir ![]() jr и
jr и
ic jc, иначе порядок строк и (или) столбцов будет обращен.
Рисунок 9.