

Pakhomov_A_N_Krivenkov_M_V_Elektricheskiy_privod
.pdfТема 2. Характеристики типовых упругих элементовментов
При повороте ведомого колеса 2
ременной (цепной) передачи на угол Δϕ2 в натянутой ветви возникает сила:
Fр=kпcрΔϕ2r2
Угловая жесткость для второго колеса:
cϕ2=M2/Δϕ2=Fрr2/Δϕ2= kпcрr22
Раздел 2. Механика электропривода |
41 |
|
|

Тема 3. Диссипативные силы и их влияние в электромеханическихомеханических системах
При деформациях элементов в механической части электропривода возникают не только упругие силы, но и силы сопротивления. Силы сопротивления приводят к рассеиванию (диссипации механической энергии), т.е. к превращению ее в тепловую или иные виды.
Точный учет таких сил произвести очень сложно, поэтому в теории электропривода их учитывают приближенно путем введения коэффициента сопротивления b.
Силы диссипации пропорциональны скорости деформации механического элемента, поэтому момент, связанный с наличием угла закручивания ϕ в упругом вращающемся элементе, будет равен
M = M у + M дс = сϕΔϕ + bΔω
Раздел 2. Механика электропривода |
42 |
|
|

Тема 4. Силы и моменты, действующие в системе электроприводалектропривода
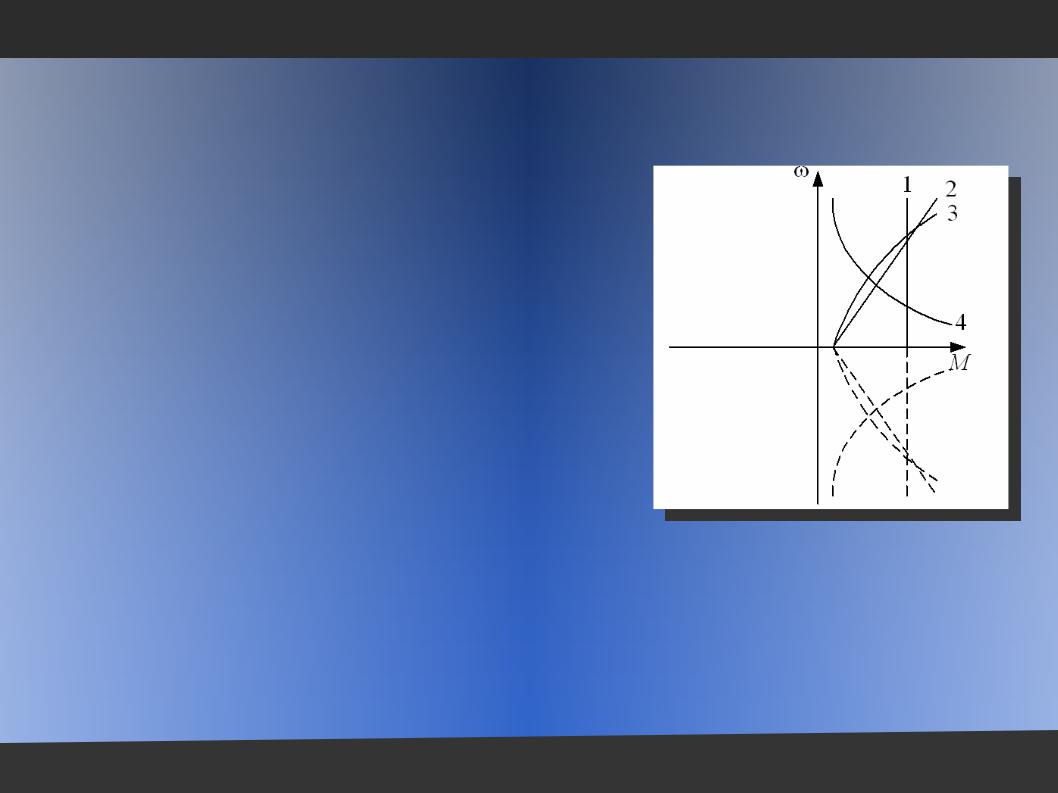
Механические характеристики двигателей
1 – синхронный двигатель
2 – ДПТ с независимым(параллельным) возбуждением
3 – Асинхронный двигатель
4 – ДПТ последовательного возбуждения
Раздел 2. Механика электропривода |
43 |
|
|
Тема 4. Силы и моменты, действующие в системе электроприводалектропривода
Активные моменты не изменяют своего знака при изменении направления движения.
1 – соответствует различным подъемным механизмам
2 – деревообрабатывающие станки
3 |
– вентиляторы, центробежные насосы и |
|
компрессоры |
|
|
4 |
– приводы токарных и фрезерных |
Характеристики статических |
станков. |
моментов |
|
Раздел 2. Механика электропривода |
44 |
|
|

Тема 4. Силы и моменты, действующие в системе электроприводалектропривода
Реактивные моменты препятствуют движению и меняют свой знак при изменении направления движения.
1 – соответствует различным подъемным механизмам
2 – деревообрабатывающие станки
3 |
– вентиляторы, центробежные насосы и |
|
компрессоры |
|
|
4 |
– приводы токарных и фрезерных |
Характеристики статических |
станков. |
моментов |
|
Раздел 2. Механика электропривода |
45 |
|
|

Тема 5. Приведение моментов и сил сопротивлениявления
Равенство мощностей на валах двигателя и РО машины (без учета потерь в ПУ):
Мсωд=Мроωро Мс=Мро(ωро/ωд)=Мроj-1
При наличии в ПУ нескольких передач с передаточными числами j1,…, jn:
n
M с = M ро П ji−1
i=1
Если РО машины имеет поступательное движение, а двигатель – вращательное, тогда
Мс=Fро(νро/ωд)=Fроρ
Раздел 2. Механика электропривода |
46 |
|
|

Тема 6. Приведение инерционных массс
Момент инерции одного тела вычисляется по формуле
J=mr2
Для показанной на рисунке СЭП:
Jпрωд2/2=Jдωд2/2+J1ωд2/2+J2ω12/2+J3ω12/2+J4ωро2/2+Jроωро2/2
Jпр – момент инерции системы, приведенный к валу двигателя:
Jпр=Jд+J1+J2/j12+J3/j12+J4/jро2+Jро/jро2
Приведение масс, движущихся поступательно, к вращательному движению:
Jпрωд2/2=Jωд2/2+mν2/2 Jпр=J+mν2/ωд2=J+mρ2
Раздел 2. Механика электропривода |
47 |
|
|

Тема 7. Приведение упругих моментов и моментов диссипативныхдиссипативных сил
Угол ϕ закручивания всей системы:
ϕ=ϕд1+ϕ12+ϕ23+ϕ34+ϕ4ро
Угол поворота колеса редуктора 1 относительно двигателя:
ϕд1=М/сд1
Углы деформации кинематических пар:
ϕ12=М/с12
ϕ23=j1ϕ23’=j12M/с23
ϕ34=j12M/с34
ϕ4ро=j1ϕ4ро’=jро2M/с4ро
ϕ=Мe=М(eд1+e12+j12(e23+e34)+jро2e4ро)
e=cϕ-1 - податливость упругих элементов системы
Раздел 2. Механика электропривода |
48 |
|
|

Тема 8. Уравнение движения электроприводавода
Уравнение Лагранжа второго рода при переменном моменте инерции:
Ji(ϕi)dωi/dt+1/2dJi(ϕi)/dϕiωi2=Mвнi-Мсопрi
Уравнение движения для трехмассовой электромеханической системы при постоянных моментах:
Мд-Мд1=Jдdωд/dt Мд1-M1ро=J1dω1/dt
М1ро-Мро=Jроdωро/dt
Трехмассовая электромеханическая система
Раздел 2. Механика электропривода |
49 |
|
|

Тема 8. Уравнение движения электроприводавода
Выражение для двухмассовой механической системы, положив ϕ1=ϕро:
Мд– Мдро=Jдdωд/dt Мдро– Mс=Jпр’dωро/dt
где Jпр’=Jпр– Jд=J1+Jро
Принимая жесткими все звенья системы получим уравнение движения одномассовой модели жесткой механической СЭП:
Jпрdωд/dt=Mд-Мс
которое получило название основного уравнения динамики привода.
Раздел 2. Механика электропривода |
50 |
|
|