

Pakhomov_A_N_Krivenkov_M_V_Elektricheskiy_privod
.pdfТема 2. Математическая модель асинхронного двигателядвигателя
Т-образная схема замещения АД
Частота тока в роторе пропорциональна частоте вращения магнитного поля относительно ротора:
f |
2 |
= p ω1 − ω |
= p ω1 − ω ω1 = p |
ω1 ω1 − ω = f s |
|
2π |
2π ω1 |
1 |
|
|
|
2π ω1 |
Величина, характеризующая разность скоростей вращения ротора и поля статора, называется скольжением:
s= ω0 − ω
ω0
Раздел 4. Электропривод с двигателями переменного тока |
101 |
|
|

Тема 2. Математическая модель асинхронного двигателядвигателя
Т-образная схема замещения АД
ЭДС статора пропорциональна магнитному потоку:
E1 = 
 2 πk1w1Фf1
2 πk1w1Фf1
ЭДС ротора можно рассчитать как
E2 = 
 2 πk2 w2Фf2 =
2 πk2 w2Фf2 = 
 2 πk2 w2Фf1s = E2кs
2 πk2 w2Фf1s = E2кs
Ток ротора равен:
I2 = |
|
|
|
E2к |
||||
|
|
|
|
|
|
|
||
|
R |
|
2 |
|
|
|||
|
|
|
|
|||||
|
|
|
2 |
|
+ X 22к |
|||
s |
||||||||
|
|
|
|
|
|
|
||
Раздел 4. Электропривод с двигателями переменного тока |
102 |
|
|

Тема 3. Электромеханическая характеристикаика АДАД
Параметры цепи неподвижного ротора АД приведены к статорной цепи на основании выражений:
1) магнитного равновесия:
Fμ = F1 + F2 Iμ w1m1k1 = I1w1m1k1 + I2 w2m2k2
|
|
|
w2m2 k2 |
|
|
1 |
|
|
|
|
|
|
′ |
|
|
|
|
|
|
|||||||
|
|
Iμ = I1 + I 2 |
|
|
|
|
|
= I1 + |
|
|
|
|
|
I 2 |
= I1 + I 2 |
|
|
|
|
|
|
|||||
|
|
|
w m k |
|
|
|
k |
i |
|
|
|
|
|
|
||||||||||||
|
|
|
|
1 1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
2) баланса мощностей: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
m2 I2 E2к = m1I2¢E2¢к E2¢ |
к = |
m2 I2 |
E2к |
= |
|
m2 |
ki E2к |
= ke E2к |
|
|||||||||||||||||
m I |
¢ |
|
|
m |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|||
|
|
3) баланса электрических потерь: |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
2 |
|
= m1I2¢ |
2 |
R2¢ R2¢ |
|
|
|
|
|
m2 I22 |
|
|
|
m2 I2 |
|
I2 |
|
|
|||||||
|
Dpэл2 = m2 I2 R2 |
|
= |
|
|
R2 = |
|
|
× |
|
R2 |
|
||||||||||||||
|
|
|
m I ¢2 |
m I |
¢ |
I ¢ |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
1 |
2 |
|
2 |
|
|
|
|
′ |
1 |
|
||
|
|
|
|
||
I |
= I2 |
||||
2 |
|||||
|
|
|
ki |
||
′ |
= ke E2к |
E2к |
R2¢ = ke × ki × R2 |
|
|||
X |
′ |
к |
= ke × ki × X 2 |
к |
2 |
||||
Коэффициенты приведения (трансформации) тока и напряжения:
ki |
= |
I2 |
= |
m1 |
× |
w1k1 |
|
|
ke |
= |
E2к |
= |
w1k1 |
|
|
|
|
|
|||||||||||
I2¢ |
|
|
|
и |
E2¢к |
w2k2 |
|
|||||||
|
|
|
m2 w2k2 |
|
|
|
|
|||||||
Раздел 4. Электропривод с двигателями переменного тока |
103 |
|
|

Тема 3. Электромеханическая характеристикаика АДАД
Г-образная схема замещения АД
Для исключения зависимости токов схемы от скольжения переходят к Г- образной схеме замещения с вынесенным контуром намагничивания на зажимы питающей сети.
Приведенный ток ротора определяется по формуле:
I |
′ |
= |
|
U1 |
|
= |
|
|
|
|
|
|
U1 |
|
|
|
|
= |
|
|
|
|
U1 |
|
|
|
|
|
|
2 |
Z1 |
+ Z |
′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
R′ |
|
2 |
|
|
|
|
|
|
R′ |
|
2 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
2 |
|
|
|
+ |
+ (X |
|
+ X ′ |
)2 |
|
|
|
|
+ |
+ X |
2 |
|
|
|||||||||
|
|
|
|
|
|
|
|
R |
2 |
|
|
|
|
|
R |
2 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
s |
|
1 |
2к |
|
|
|
|
|
1 |
|
s |
|
к |
|||||
Раздел 4. Электропривод с двигателями переменного тока |
104 |
|
|

Тема 3. Электромеханическая характеристикаика АДАД
Полное сопротивление короткого замыкания (при пуске АД) для соединения фаз в звезду:
Zк = U лн
 3Iп
3Iп
А активная и индуктивная составляющие:
|
|
|
|
|
|
|
|
|
Rк = Zк cos ϕп |
|
|
|
= |
|
|
|
|
и |
X |
к |
Z |
2 |
− R2 |
|
||
|
|
|
|
|
к |
к |
||
|
|
|
|
|
|
|
|
|
При неподвижном роторе s=1, и ток достигает тока КЗ:
I |
′ |
|
|
U1 |
|
|
|
|
|
|
|
|
|
|
|||
2п = |
2 |
+ X |
2 |
|
|
|||
|
|
|
R |
|
|
|||
|
|
|
к |
|
к |
|||
Раздел 4. Электропривод с двигателями переменного тока |
105 |
|
|
Тема 3. Электромеханическая характеристикаика АДАД
Уравнение электромеханической характеристики АД:
I |
′ |
= |
|
|
|
|
U1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
2 |
|
|
|
|
R′ |
|
2 |
|
|
|||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
R |
+ |
2 |
|
|
+ X 2 |
|||
|
|
s |
||||||||||
|
|
|
|
|
1 |
|
|
к |
||||
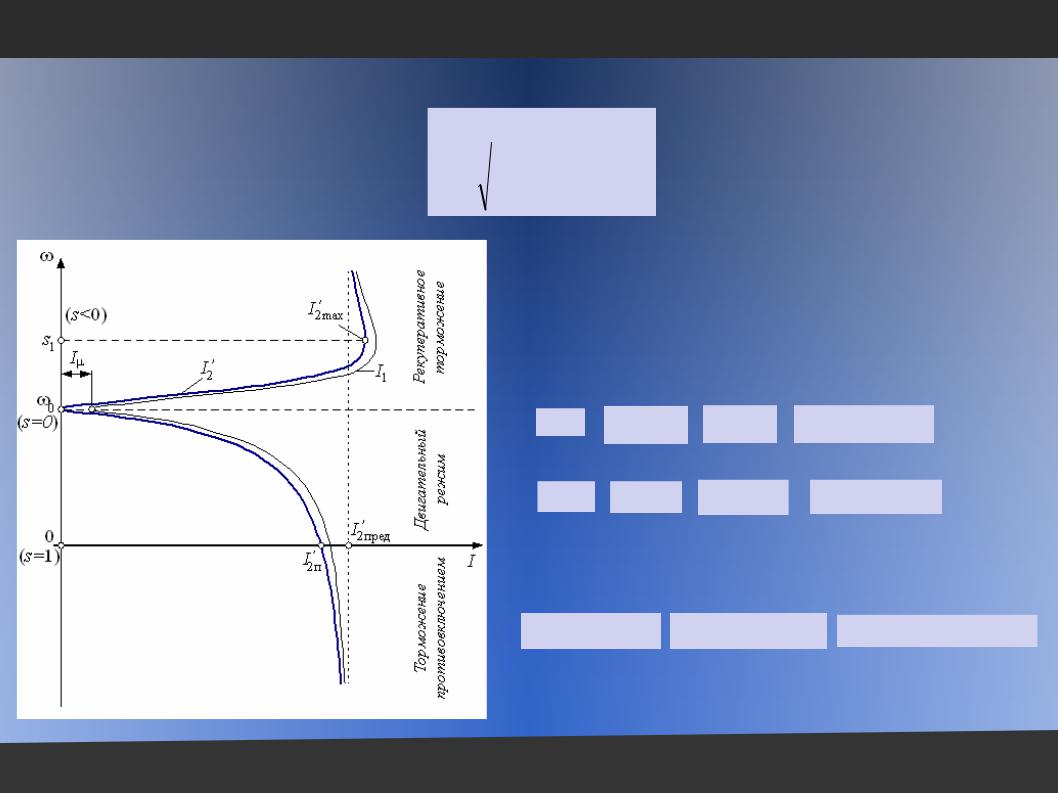
Характерные точки характеристики:
1) точка идеального холостого хода при s=0
|
|
|
|
|
|
|
|
|
|
|
|
′ |
= |
|
|
|
|
|
|
= I |
|
= I |
|
|
|
|
|
|
|
|
ω = ω0 |
|
|
|
I |
|
|
|
|
|
|||||||||
|
|
s |
= |
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
I2 |
|
|
|
|
1 |
|
μ |
|
1хх |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
2) точка короткого замыкания при |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
′ |
|
′ |
|
|
I1 = Iп = Iкз |
|||||||
|
|
s = 1 |
|
|
ω = 0 |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
I 2 |
= I 2п |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3) точка максимального значения тока ротора в области отрицательных скольжений
′ |
|
|
ω = ω0 (1 − s1 ) |
|
|
|
|
|
|
/ R1 |
|
|
I |
′ |
= I |
′ |
= U1 / X к |
||
s1 = −R2 |
|
|
2 |
2max |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Раздел 4. Электропривод с двигателями переменного тока |
106 |
|
|

Тема 4. Механическая характеристика АДАД
Преобразование электрической энергии в механическую в АД:
|
P = P − ∑ p = P − p |
− p |
− p |
2э |
− p |
2м |
− p |
мех |
− p |
доб |
|
|
|
|
|
|
|||||||||||
|
2 1 |
1 |
1э |
|
|
1м |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
Электрические потери в роторе: |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
p |
2э |
= P − P = Мω |
0 |
− Мω = Mω |
0 |
ω0 − ω |
|
= P s |
|
|||||||||||||
|
|
|
|
|
|
ω |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
эм |
мех |
|
|
|
|
|
|
|
|
0 |
|
|
эм |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Механическая мощность на валу АД |
|||||||||||||||||||||
|
|
|
|
|
|
определяется в виде потерь на переменном |
|||||||||||||||||||||
|
|
|
|
|
|
резисторе: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
P = |
m1I2′2 R2′(1− s) |
= Mω = Mω |
(1− s) |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Энергетическая диаграмма АД |
|
|
|
мех |
|
|
s |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Откуда выражение для электромагнитного момента:
M = |
m1I2′2 R2′ |
= |
|
|
m1U12 R2′ |
|
|
|
= f (s) |
||||
|
|
|
|
|
|
|
|||||||
|
sω |
0 |
|
|
|
R′ |
|
2 |
|
|
|
||
|
|
|
|
|
|
|
|
2 |
|
|
|||
|
|
|
|
ω |
s R + |
2 |
|
|
+ X |
|
|
||
|
|
|
s |
|
|
|
|||||||
|
|
|
0 |
|
1 |
|
|
|
к |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Раздел 4. Электропривод с двигателями переменного тока |
107 |
|
|

Тема 4. Механическая характеристика АДАД
Критическое скольжение, при котором момент двигателя имеет максимальное (критическое) значение Мк:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sк = ± |
|
|
R2′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R2 + X |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для АД большой мощности (более 100 кВт) пренебрегают влиянием |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
активного сопротивления статора, поэтому формула примет упрощенный |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m1U12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
sк |
≈ ± |
R2′ |
|
|
|
|
|
|
|
|
|
|
M к = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
X к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2ω0 [R1 ± R12 + X к2 ] |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
Значения критического момента характеризуют перегрузочную |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
способность АД: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
λ |
|
|
= |
|
M к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
Формула Клосса: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
2ω0 [R1 ± |
|
|
|
|
|
|
|
] |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
M |
|
= |
m1U12 R2′ |
R12 + X к2 |
M = |
|
2M к (1 + ε) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
ε = |
|
|
|
R1 |
|
|
= s |
|
R1 |
||||||||||||||||||||||||||||||||||||||||||||
|
M |
|
|
|
|
|
R′ |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
s |
к |
|
|
|
, где |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
к |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
+ 2ε |
|
|
|
|
|
|
2 |
|
2 |
|
|
к |
R2′ |
||||||||||||
|
|
|
|
|
ω |
s R |
+ |
2 |
|
|
|
+ X |
m U |
|
|
|
|
|
|
|
sк |
|
|
s |
|
|
|
|
|
|
|
|
R |
+ X |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к |
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
0 |
1 |
|
s |
|
|
|
|
1 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Раздел 4. Электропривод с двигателями переменного тока |
108 |
|
|
Тема 4. Механическая характеристика АДАД
Для двигателей большой мощности влиянием активного сопротивления статора пренебрегают, поэтому
M = |
2M к |
s + sк - упрощенная формула Клосса |
sк s
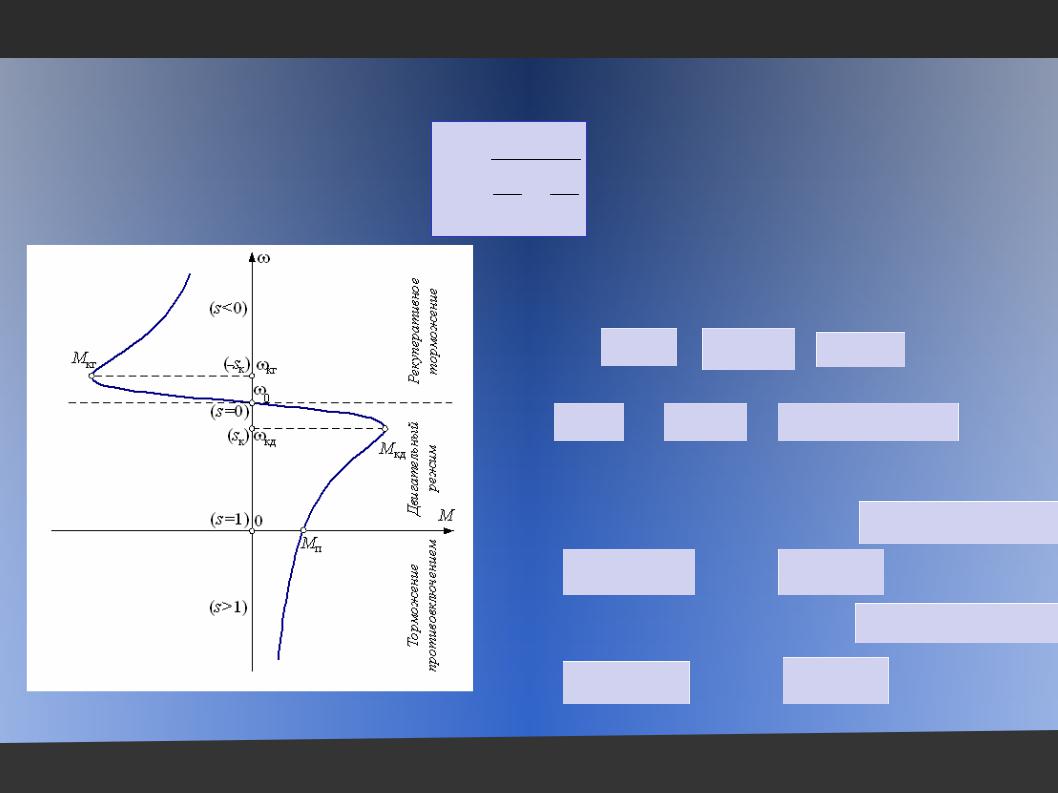
Характерные точки характеристики
1) точка идеального холостого хода при
s = 0 ω = ω0 M = 0
2) точка короткого замыкания при
s = 1 ω = 0 M = M п = M кз
3) точки максимальных значений (экстремума) электромагнитного момента
в двигательном режиме работы ωкд = ω0 (1 − sк )
M = M кд при s = +sк
в генераторном режиме работы ωкг = ω0 (1 + sк )
M = M кг при s = −sк
Раздел 4. Электропривод с двигателями переменного тока |
109 |
|
|

Тема 4. Механическая характеристика АДАД
Энергетический режим работы АД определяется значением и знаком скольжения:
1) |
режим идеального холостого хода |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω = ω0 |
|||||
|
|
|
|
s = 0 |
|||||||||||
2) режим короткого замыкания |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
s = 1 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
ω = 0 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
3) |
генераторный режим с отдачей энергии в сеть (рекуперативное |
||||||||||||||
торможение АД) |
|
|
|
|
|
|
|||||||||
ω > ω0 |
|
|
|||||||||||||
|
|
|
|
s < 0 |
|
|
|
|
|
||||||
4) |
двигательный режим работы |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
ω0 > ω < 0 |
|
|||||
|
|
0 < s < 1 |
|||||||||||||
|
|
|
|||||||||||||
5)генераторный режим последовательно с сетью (торможение противовключением)
s > 0 |
|
ω < 0 |
|
|
|
Раздел 4. Электропривод с двигателями переменного тока |
110 |
|
|