

27. Задача наименьших квадратов. Решение методом qr-разложения.
Задача наименьших квадратов, возникающая при научных и инженерных расчетах, может рассматриваться, как задача восстановления зависимости по эмпирическим данным.
Эмпирические данные представляют собой значения неизвестной функции, полученные в результате эксперимента на сетке узлов, в общем случае, неравномерной.
Узлы сетки могут представлять собой моменты времени или пространственные координаты линейной электрической или механической системы.
Координаты узлов и значения функции в
этих узлах объединяются в набор точек
![]() ,
где
,
где
![]() – координаты узлов,
– координаты узлов,
![]() – значения функции.
– значения функции.
Задача заключается в определении коэффициентов аппроксимирующей функции, которая должна приближать наблюдаемые данные с возможно большей точностью.
Пример:
![]() .
Такая функция часто используется при
отслеживании дрейфа временных рядов в
экономике.
.
Такая функция часто используется при
отслеживании дрейфа временных рядов в
экономике.
В общем случае такая функция может не обеспечить требуемую точность восстановления зависимости. Поэтому в качестве аппроксимирующих функций используются общие многочлены по системе линейно-независимых функций:
Система независимых функций, которая называется системой, может быть представлена в виде степенных функций, тригонометрических функций и др.
В случае степенных функций
![]() .
.
Число базисных функций и размерность пространства базисных функций, как правило, меняет число наблюдаемых данных.
В идеале, желательно, что бы ошибки в
узлах сетки имели минимальную величину:
![]() .
.
Если потребовать, чтобы ошибки в узлах сетки были равны нулю, то коэффициенты обобщенного многочлена должны удовлетворять матричному уравнению:
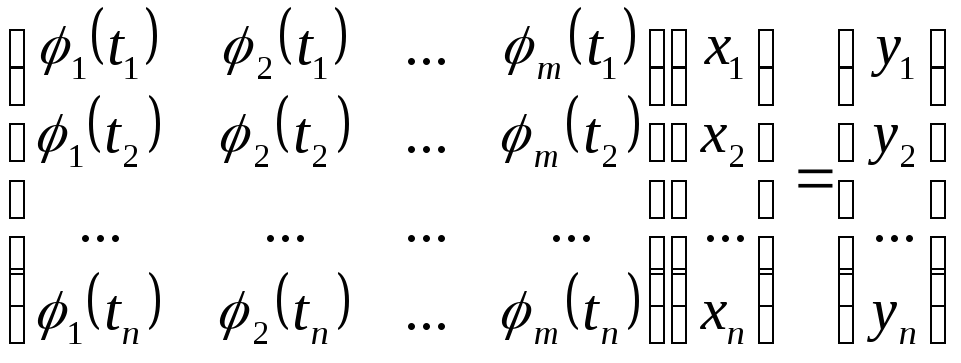
Решения этой системы возможно только
при условии, если
![]() ,
и определитель матрицы
,
и определитель матрицы
![]() отличен от нуля:
отличен от нуля:
![]() ,
в противном случае решение этой системы
оказывается невозможным. Однако, можно
подобрать такие значения коэффициентов
многочлена, чтобы полученный многочлен
приближал наблюдаемые данные к значениям
функции.
,
в противном случае решение этой системы
оказывается невозможным. Однако, можно
подобрать такие значения коэффициентов
многочлена, чтобы полученный многочлен
приближал наблюдаемые данные к значениям
функции.
Точность восстановления зависимости,
представленной вектором невязок
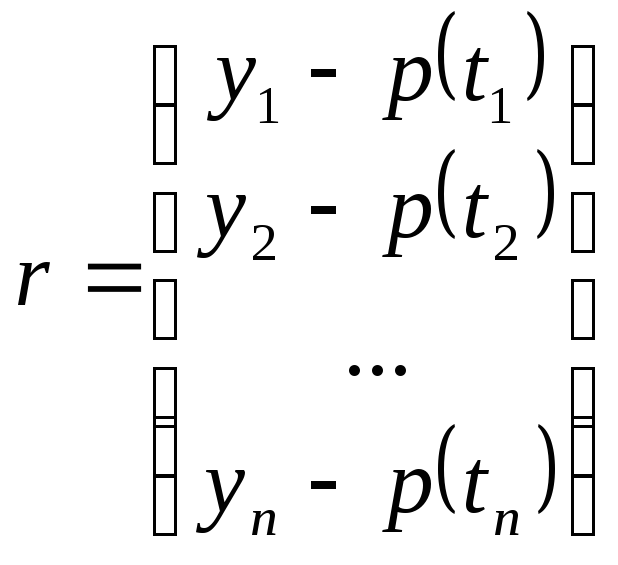 можно представить некоторой нормой,
которая характеризует среднее значение
ошибок по всем узлам.
можно представить некоторой нормой,
которая характеризует среднее значение
ошибок по всем узлам.
В качестве нормы можно использовать выражение:
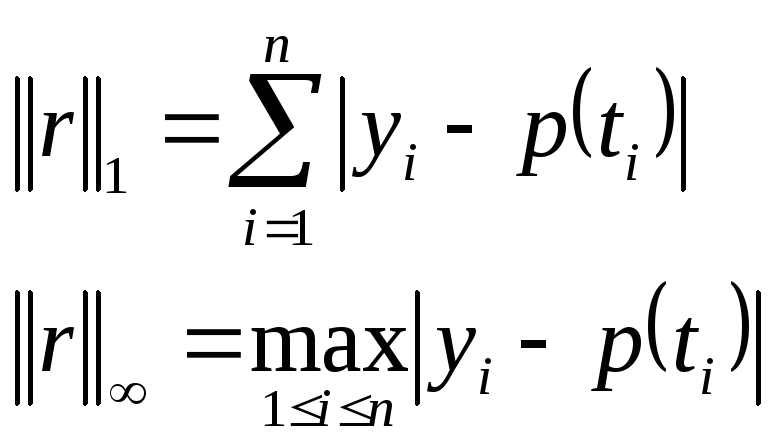
Евклидова норма:
![]() или квадрат этой нормы:
или квадрат этой нормы:
![]() .
.
Задача наименьших квадратов возникает из задачи минимизации квадрата евклидовой нормы
![]()
![]()
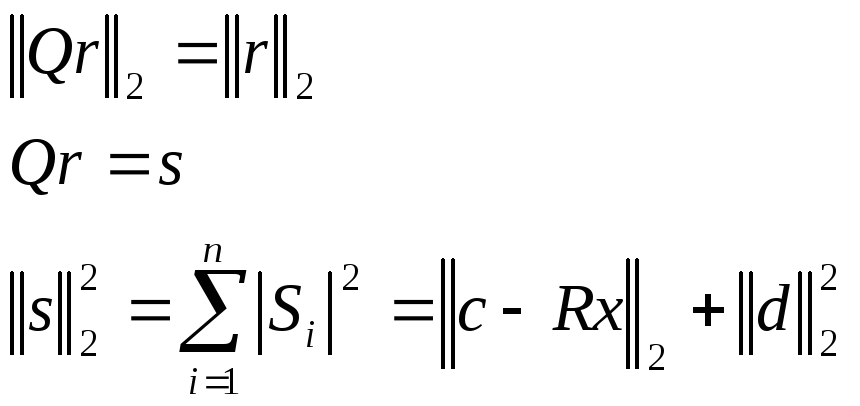
) Ортогональное преобразование любого вектора не изменяет его длины (евклидова норма):
![]()
2) Ортогональное преобразование не изменяет углов между векторами в n-мерном пространстве.
Угол между векторами в n-мерном пространстве:
Для того, чтобы выражение имело смысл необходимо, чтобы его правая часть не превышала по модулю 1.
Это следует из неравенства Коши-Шварца:
Сохранение углов между векторами следует из равенства:
QR-разложение может быть осуществлено методами вращения и отражения.
Рассмотрим вращение вектора
 на плоскости.
на плоскости.
Матрица вращения задается в виде:
![]() ,
,
![]() – угол вращения.
– угол вращения.
Свойство ортогональной матрицы – сохранение угла между векторами.
Видно, что матрица вращения – ортогональная матрица:
![]()
Если принять, что
![]() или
или
![]() ,
то
,
то
![]() .
.
Рассмотрим систему линейных алгебраических уравнений второго порядка:
![]()

Найдем матрицу Q такую,
что
![]()
 ,
где
,
где
Рассмотрим систему уравнений с матрицей
![]() .
.
Плоской матрицей вращения называется матрица, имеющая вид:
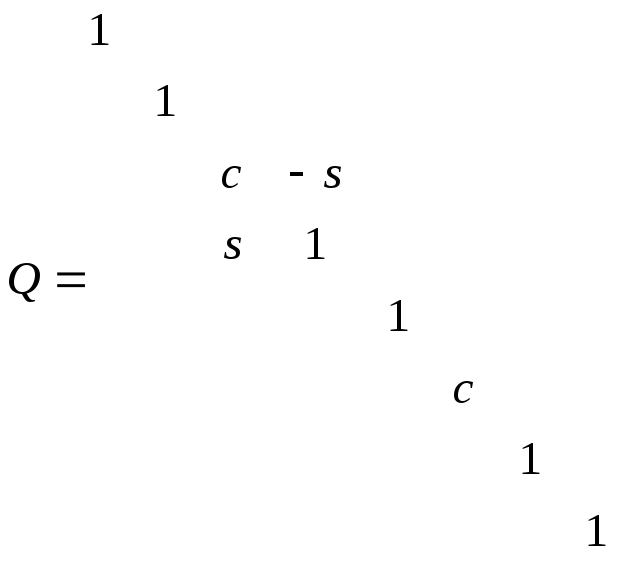
![]()
Можно подтвердить, что матица Q является ортогональной матрицей с определителем, равным 1.
Применение указанной матрицы к i-му
столбцу матрицы A:
![]() ,
дает вектор
,
дает вектор
![]() ,
имеющий в j-ой позиции 0.
(Верхний индекс обозначает номер
вектора).
,
имеющий в j-ой позиции 0.
(Верхний индекс обозначает номер
вектора).
Применяя к исходной матрице указанные плоские матрицы вращения получим матрицу:
С помощью указанных матриц вращения все элементы матрицы R ниже главной диагонали становятся равными нулю.
Для исключения соответствующих элементов, коэффициенты c и s определяются выражениями:
![]()
Произведение ортогональных матриц является ортогональной матрицей.
![]()
Чтобы решить задачу, матрица A
дополняется матрицей
![]() ,
матрица A является
произвольной.
,
матрица A является
произвольной.
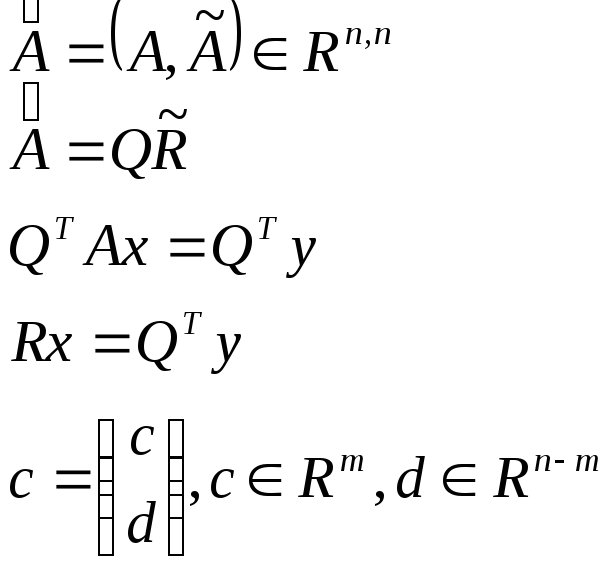
Учитывая, что ортогональное преобразование вектора невязки:
второе слагаемое не зависит от
коэффициентов многочлена, линейное
значение первого слагаемого сводится
к решению системы уравнений:
![]() ,
где R – верхняя
треугольная матрица.
,
где R – верхняя
треугольная матрица.
Решение задачи наименьших квадратов
при
![]() ,
сводится к задаче решения системы
алгебраических уравнений с верхней
треугольной матрицей:
,
сводится к задаче решения системы
алгебраических уравнений с верхней
треугольной матрицей:
![]()
Чтобы применить метод QR-разложения к решению задачи наименьших квадратов, нужно привести матрицу A к квадратной форме:
![]()
матрица B – произвольная.
![]()
Исходное уравнение:
![]()
Матрица
![]() является квадратной
является квадратной
![]() .
К этой системе можно применить метод
QR-разложения.
.
К этой системе можно применить метод
QR-разложения.
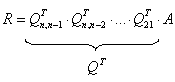
Применяя метод вращения, уравнение
записывается:
 ,
,
размерность вектора
![]() ,
размерность вектора
,
размерность вектора
![]() ,
,
![]() – ортогональная матрица,
– ортогональная матрица,
![]() – верхняя треугольная матрица.
– верхняя треугольная матрица.
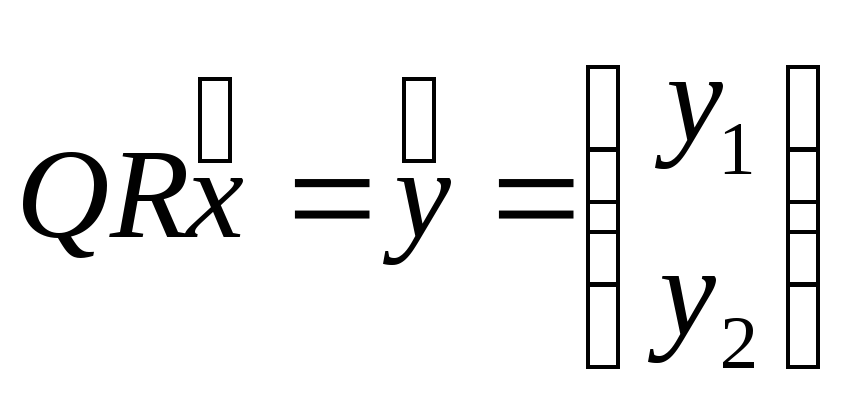
Разобьем матрицу R на блоки:
Умножая матрицу R
справа на
![]() можем записать:
можем записать:
невязка (ошибка)

![]()
От неизвестных параметров зависит только первое слагаемое нормы невязки.
Минимальное значение этого слагаемого,
если матрица A
максимальный размер, определяется из
уравнения:
![]() .
.
Таким образом, задача наименьших квадратов решается в два этапа.
На первом этапе осуществляется
QR-разложение расширенной
матрицы и определяются ее подматрицы
![]() и
и
![]() .
.
На втором этапе решается задача решения системы линейных алгебраических уравнений, матрица которой представлена в QR форме.
Матрица Q является ортогональной матрицей, т.е. матрицей, транспонирование которой совпадает с обратной матрицей.
Матрица R – верхняя треугольная матрица, решение которой осуществляется методом обратной подстановки.