

21. Кинематические цепи
Кинематической цепью называют совокупность звеньев соединенных в кинематические пары.
Кинематические цепи бывают: простые, сложные, открытые, замкнутые.
В машинах и приборах используют плоские кинематические цепи.
Параметры движения звеньев механизма( перемещения скорость ускорение оценивавающего относительно 1 из них такое звено называется основой ( стойкой).
22. Определение подвижности механизмов с учетом действующих сил.
Структура механизма должна обеспечивать возможность относительность движения его звеньев происходящих под действием, приложенных к ним сил.
Силы взаимодействующие разделяют на нормативные и тангенсыальные ( силы трения)
Важной характеристикой является КПД механизмов. Определение КПД осуществляется при заданных размерах и коэффициентов трения звеньев. В кинематической цепи число ведущих звеньев должно быть достаточным для сообщения ведомым звеньям определенного движения.
Для определения этого числа используют следующие формулы:
Для пространственных механизмов
Формула Сомова-Малышева:W=5p5 – 4p4- 3p3-2p2-p1, где W- степень подвижности механизма( число ведущих звеньев)
n- Число подвижных звеньев механизма.
p5;p4;p3;p2;p1- число кинематических пар соответствующего класса.
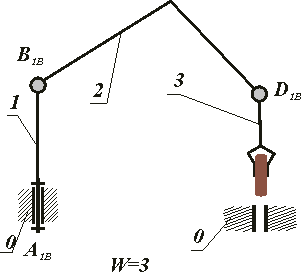
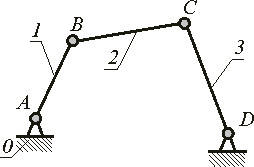
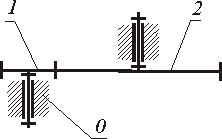
Для плоских механизмов используется формула Чейбышева: W=3n- 2p5-p4.
23.Построение и классификация механизмов.
Механизмы классифицируются по следующим признакам:
-
По области применения и функциональному назначению:
-
механизмы летательных аппаратов;
-
механизмы станков;
-
механизмы кузнечных машин и прессов;
-
механизмы двигателей внутреннего сгорания;
-
механизмы промышленных роботов (манипулятороы);
-
механизмы компрессоров;
-
механизмы насосов и т.д.
по виду передаточной функции на механизмы:
-
с постоянной передаточной функцией;
-
с переменной передаточной функцией:
-
с нерегулируемой (синусные, тангенсные);
-
с регулируемой:
-
со ступенчатым регулированием (коробки передач);
-
с бесступенчатым регулированием (вариаторы).
-
-
по виду преобразования движения на механизмы преобразующие :
-
вращательное во вращательное:
-
редукторы вх >вых;
-
мультипликаторы вх <вых;
-
муфты вх =вых;
-
-
вращательное в поступательное;
-
поступательное во вращательное;
-
поступательное в поступательное.
по движению и расположению звеньев в пространстве:
-
пространственные;
-
плоские;
-
сферические.
Все механизмы являются пространственными механизмами, часть механизмов, звенья которых совершают движение в плоскостях параллельных одной плоскости, являются одновременно и плоскими, другая часть механизмов, звенья которых движутся по сферическим поверхностям экивидистантным какой-либо одной сфере, являются одновременно и сферическими.
|
|
|
|
Рис.1.10 |
|

-
по изменяемости структуры механизма на механизмы:
-
с неизменяемой структурой;
-
с изменяемой структурой.
В процессе работы кривошипно-ползунного механизма насоса его структурная схема все время остается неизменной. В механизмах манипуляторов в процессе работы структурная схема механизма может изменяться. Так если промышленный робот выполняет сборочные операции , например, вставляет цилиндрическую деталь в отверстие, то при транспортировке детали его манипулятор является механизмом с открытой или разомкнутой кинематической цепью. В тот момент когда деталь вставлена в отверстие, кинематическая цепь замыкается , структура механизма изменяется, подвижность уменьшается на число связей во вновь образованной кинематической паре деталь-стойка.
|
|
|
|
Рис.1.11 |
|

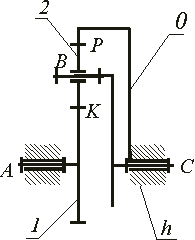
Структура манипулятора изменяется и тогда, когда в одной или нескольких кинематических парах включается тормоз. Тогда подвижное соединение двух звеньев заменяется неподвижным, два звена преобразуются в одно. На рис. 1.13 тормоз включен в паре С.
|
|
|
|
Рис.1.12 |
|
-
по числу подвижностей механизма:
-
с одной подвижностью W=1;
-
с несколькими подвижностями W>1:
-
суммирующие (интегральные);
-
разделяющие (дифференциальные).
-
|
|
|
Рис.1.13 |

-
по виду кинематических пар (КП):
-
с низшими КП ( все КП механизма низшие );
-
с высшими КП ( хотя бы одна КП высшая );
-
шарнирные (все КП механизма вращательные - шарниры).
-
по способу передачи и преобразования потока энергии:
-
фрикционные ( сцепления );
-
зацеплением;
-
волновые (создание волновой деформации);
-
импульсные.
-
по форме, конструктивному исполнению и движению звеньев:
-
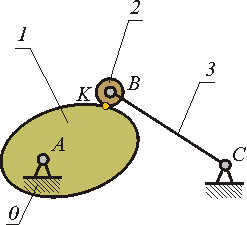
рычажные ( рис.1.14);
-
зубчатые ( рис.1.15);
-
кулачковые ( рис. 1.16);
-
планетарные ( рис. 1.17);
-
манипуляторы ( рис.1.11-1.12).
|
|
|
|
Рис.1.14 |
Рис.1.15 |
|
|
|
|
Рис.1.16 |
Рис.1.17 |
![]()