

6. Ошибки от задающих воздействий
Получим формулу для вычисления ошибки от задающего воздействия. Учитывая равенство (132), а также выражение для передаточной функции ошибки
![]() ,
,
получим
![]() ,
(134)
,
(134)
где W (p) — передаточная функция разомкнутой системы.
При
вычислении ошибок по формуле (134)
необходимо иметь в виду, что изображение
по Лапласу типовых воздействий для
![]() и
и
![]() соответственно равны:
соответственно равны:
![]() ;
;
![]() ;
;
![]() .
.
Кроме
того, для статистических систем
![]() ,
а для астатических
систем 1-го и 2-го порядков примем
соответственно W
(p)
=
,
а для астатических
систем 1-го и 2-го порядков примем
соответственно W
(p)
=
![]() W*
(р) и W
(р)=
W*
(р) и W
(р)=
![]() W*
(p),
при этом W*
(0) =1, где k
— коэффициент передачи
разомкнутой системы; W*
(р) — передаточная
функция без учета интегрирующих звеньев
и коэффициента передачи.
W*
(p),
при этом W*
(0) =1, где k
— коэффициент передачи
разомкнутой системы; W*
(р) — передаточная
функция без учета интегрирующих звеньев
и коэффициента передачи.
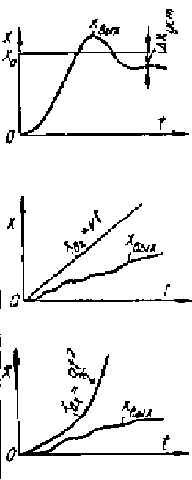
Рассмотрим теперь ошибки некоторых автоматических систем. Как видно из табл. 3, статические системы при ступенчатом воздействии имеют установившуюся ошибку
![]() ,
(135)
,
(135)
которая называется статической, или ошибкой по положению. Она пропорциональна величине задающего воздействия и уменьшается с увеличением коэффициента передачи разомкнутой системы k. При изменяющихся во времени воздействиях ошибка непрерывно возрастает, ввиду чего эти системы в качестве следящих применять нецелесообразно. Наличие статической ошибки является характерным свойством статических систем.
Таблица 3:
Реакции автоматических систем на типовые задающие воздействия и установившиеся ошибки
|
Статическая система (v = 0) |
Астатическая система |
||||
|
v = 1 |
v = 2 |
||||
|
Установив-шаяся ошибка |
Реакция системы |
Установив-шаяся ошибка |
Реакция системы |
Установив-шаяся ошибка |
Реакция системы |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|||

![]() ,
(136)
,
(136)
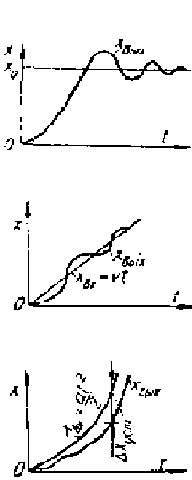
пропорциональна скорости v изменения входного сигнала, ввиду чего ее называют скоростной ошибкой, а коэффициент передачи разомкнутой системы k — добротностью системы по скорости. Отсутствие статической ошибки объясняется наличием в одноцепочечной структурной схеме системы интегрирующего звена.
Астатические системы 2-го порядка принципиально точно отрабатывают как ступенчатый, так и линейно возрастающий сигнал. При отработке квадратичного сигнала имеет место ошибка
![]() ,
(137)
,
(137)
пропорциональная ускорению а входного сигнала и обратно пропорциональная коэффициенту усиления разомкнутой системы k, который называется добротностью системы по ускорению, а сама ошибка — ошибкой системы по ускорению.
Итак, с увеличением коэффициента передачи разомкнутой системы установившиеся ошибки уменьшаются. Но, как было показано в седьмой беседе, с увеличением k ухудшается устойчивость автоматических систем. Таким образом, требование к точности противоречит требованию к устойчивости. Следовательно, при выборе величины k должно быть принято компромиссное решение. Забегая наперед, отметим, что улучшение устойчивости при заданном относительно большом значении k достигается путем включения в систему корректирующих устройств, о чем подробно будет рассказано в девятой беседе.
Отмечая влияние порядка астатизма системы v на точность, констатируем, что чем больше v, тем точнее система отрабатывает более сложное воздействие. Поэтому следящие системы и системы управления выполняют как астатические. Однако с увеличением порядка астатизма системы более склонны к колебаниям в переходных процессах, и их устойчивость ухудшается. Поэтому системы с порядком астатизма более двух на практике почти не встречаются.