

Синтез линейных непрерывных локальных систем заданных структур
При практических разработках систем чаще всего приходится находить параметров системы при заданной полной структуре, описанной в аналитической форме либо с помощью графов или передаточных функций.
Наиболее просто такие задачи решаются для непрерывных линейных систем, если в систему входят нелинейности, то их учитывают с помощью методов линеаризации.
1. Анализируем дифференциальное уравнение, описывающее входные и выходные сигналы.
2. Разбивается уравнение на уравнения промежуточных сигналов.
3. Осуществляем подбор элементной базы на основании передаточных функций элементов и дифференциальных сигналов.
4. Используем систему известными методами.
Синтез дискретно непрерывных систем
При синтезе этих систем принципиальная функциональная схема должна быть полностью задана. В процессе проектирования необходимо найти законы регулирования, которые можно реализовать в виде последовательного, параллельного и последовательно параллельно КУ, создаваемого различными способами.
В дискретно непрерывных системах необходимо выбирать не только параметров процессов ЭВМ, но и преобразователи аналог вход и аналог выход.
Значительное влияние на запас устойчивости, показатели качества и характеристик точности в таких системах оказывает такт тактования и ограниченная длина слова.
Существует несколько различных структур, предназначенных для поддержания заданной угловой скорости дискретно непрерывных систем с последовательно параллельными КУ в виде импульсных фильтров, создаваемых на основе четырехполюсников.
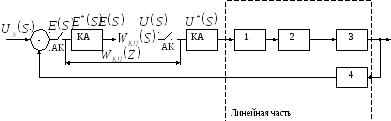
Рисунок 36 – С последовательным КУ

Рисунок 37 – С параллельным КУ

Рисунок 38 – С программным корректированием
Выходной сигнал
поступает лишь в тактовые моменты
времени
![]() ,
где
,
где![]() .
.
В МП реализовано вычислительная или регулированная система в виде рабочей программы. На вход МП подается сигнал от преобразователя аналог-вход, выходной сигнал в виде рабочей программы управления и коррекцией через преобразователь вход-аналог поступает на неизменяемую часть системы.
Рабочая программа осуществляется в течение такта квантования.
С помощью приведенной схемы выполняется различные операции регулирования и коррекции по специальной составленной программе.
Если в системе необходимо изменить параметры устройств неизменяемой части или ее основные характеристики, для этого требуется изменить рабочую программу. Поэтому с помощью микропроцессорного управления можно создать унифицированную локальную схему для управления любыми объектами.
В ДПС переводит аналоговый сигнал с помощью двух операций, квантами по уровню.
В настоящее время наибольшее распространение получили преобразователи следующих типов напряжения в цифры. Квантование по уровню оказывает влияние не только на точность системы, но и на устойчивость.
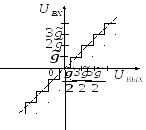
Рисунок 39
![]() - длина слова в
битах.
- длина слова в
битах.
![]() ,
- математическое значение ошибки
квантования, (182)
,
- математическое значение ошибки
квантования, (182)
![]() ,
– средне квадратичное отклонение.
(183)
,
– средне квадратичное отклонение.
(183)
Квантователь является нелинейным элементом, поэтому в замкнутых системах могут вернуть автоколебания.
В линии управляющих машин в качестве устройств, на которых реализуются законы управления и коррекции требуется установление рабочих программ.
При этом используют 4 способа программирования:
1. Прямое программирование.
2. Последовательное программирование.
3. Параллельное программирование.
4. Последовательно параллельное программирование.
Передаточную функцию системы можно записать в следующем виде:
 .
(184)
.
(184)
При прямом программировании определяется разностное уравнение по передаточной функции вида (184), которое принимает следующий вид:
![]() ,
(185)
,
(185)
![]() .
(186)
.
(186)