

Математическая модель сар
Большинство ЛСА можно привести к двум структурам, упрощенная схема которых:
а)
б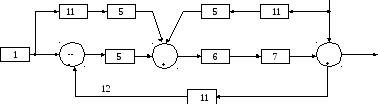 )
)
Рисунок 33
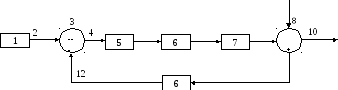
На этих схемах управляющий сигнал 2 формируется в задающем устройстве. Он сравнивается в устройстве 3 с выходными сигналами, который измеряется датчиком параллельно. В результате сравнения сигналов образуется сигнал разноси4, поступающий через устройство управления 5 и 6 на объект регулирования 7. От действия сигнала возмущения 8, поступающего в систему через сумматор 9 происходит некоторое искажение выходного сигнала 10. Замыкание системы осуществляется с помощью главной ОС 12. Если в этих рисунках исключить задатчик, то получим систему автоматической стабилизации, обрабатывающий сигнал возмущения.
Рисунок 33 б) от а) отличается тем, что в нем для получения более высокой точности применения три датчика параллельно. Которые не только измеряют выходной сигнал 10, но и сигнал управления 2 и возмущения 8. Эти два сигнала после прохождения устройства 5, поступают на сумматор 13 и уменьшают влияние синтеза и анализа на ошибку ЛСА. Практически все ЛСА при решении задач синтеза и анализа сводится к этим двум схемам. При этом пользуются правилами преобразования структурных схем, выделяют линейную, нелинейную и цифровую части.
Наряду с передаточными функциями линейных элементов используются эквивалентная передаточная функция нелинейных элементов. Для однозначных нелинейностей они совпадают с коэффициентами гармонической линеаризации.
Если система имеет сигналы на выходах и входах в векторной форме, то в ЛСА несколько входных исполнительных и корректирующих устройств.
В векторно-матричном уравнении, описываемом ЛСА, по своему описанию ничем не отличается от соответствующих уравнений объектов. Только в них входные расширенные матрицы, в которых учитывается уравнениями корректирующих и исполнительных устройств.
Так как в современных ЛСА входные управляющие ЭВМ. При необходимом для реализации численных процедур любой дискретной модели.
Для определения дискретных моделей необходимо пользоваться предварительной реализацией на ЭВМ специальные программы.
Управляемость и наблюдаемость
Позволяет оценить правильность выполнения структурных преобразований, при этом следует иметь в виду, что управляющие сигналы должны переводить системы из любого начального состояния в установившемся за конечное время – это управляемость и по выходному сигналу однозначно определить начальное состояние системы – это наблюдаемость.
Процессы называются управляемыми, если на каждую переменную состояния можно целесообразно воздействовать с помощью сигнала взаимодействия, в течение конечного действия.
Если переменное состояние не зависит от управления, то отсутствует возможность требуемого ее изменения во времени, и она является не управляемой.
Процесс называется наблюдаемым, если каждое переменное состояние процесса обуславливает изменение некоторых выходных переменных.
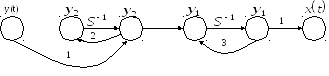
Рисунок 34 – Не полностью управляющая система
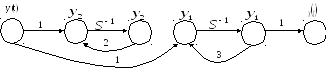
Рисунок 35 – Не полностью наблюдаемая система