

Лекция №17
Цель лекции: Изучить принцип действия и математическое описание самонастраивающихся систем.
Задачи лекции:
Принцип действия самонастраивающихся систем.
Математическое описание самонастраивающихся систем.
Желаемый результат:
Студенты должны знать:
Принцип действия самонастраивающихся систем.
Математическое описание самонастраивающихся систем.
Учебный материал Самонастраивающиеся системы (с.С.)
С.с. регулирования должны обеспечивать необходимое качество процессов регулирования. При изменении свойств объекта регулирования и элементов регулятора, а также при изменении характеристик возмущающих сил.
Различают следующие системы:
с.с. с разомкнутыми цепями самонастройки
системы с замкнутыми цепями самонастройки
системы с экстремальной самонастройкой
Рассмотрим 1)-й случай:
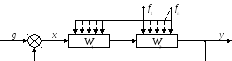
W1 и W2 – передаточные функции частной системы
W1 – передаточная функция объекта регулятора
W2 – передаточная функция корректирующего звена
Под влиянием внешних возмущений f1 и fn происходит изменение передаточной функции W2.
Для компенсации этих же возмущений их подводят к корректирующему устройству с целью изменения его передаточной функции.
Передаточная функция замкнутой системы:
![]() (1)
(1)
Для получения постоянства передаточной функции выражения (1) необходимо, чтобы W1W2=const, поэтому передатка ky должна изменяться по выражению (2):
![]() (2),
(2),
где W10, W20 – передаточные функции для некоторого начального состояния системы.
Выполнение условия (2) сопряжено со значительными трудностями вследствие того, что нельзя точно и полностью учесть все возможные воздействия на объект регулирования. Кроме того, точная реализация зависимости во многих случаях затруднительна вследствие технических трудностей. Поэтому на практике реализуется приближённое выполнение этого условия.
Рассмотрим систему автоматического построения вектора по двум составляющим:

На статорной обмотке СКВТ поступает напряжение переменного тока Ux, Uy, действующие значения которых пропорциональны проекциям вектора на оси x и y. В СКВТ образуется переменный магнитный поток, амплитуда которого пропорциональна модулю вектора.
![]() ,
а его ось составляет с осью обмотки, на
которую поступает напряжение Ux,
угол
,
а его ось составляет с осью обмотки, на
которую поступает напряжение Ux,
угол
![]()
Следящая система поворачивает ротор СКВТ до тех пор, пока напряжение на сигнальной обмотке ротора, включенной на вход усилителя, не станет равным нулю, точнее минимальным. Тогда ось сигнальной обмотки будет перпендикулярна оси потока статора.
Ось второй обмотки ротора будет совпадать с осью потока.
Напряжение на 2-ой обмотке:
![]()
ω1, ω2 – число витков статорной и роторной обмоток.
Угол между осью квадратурной обмотки ротора и осью обмотки статора, на которую подаётся напряжение Ux, являющееся аргументом вектора, который строится.
При построении вектора следящая система работает в различных условиях, в зависимости от величины модуля строящегося вектора. Это объясняется тем, что крутизна чувствительного элемента, которым является сигнальная обмотка СКВТ, зависит от амплитуды магнитного потока, то есть от модуля вектора.
Эта крутизна может быть определена из выражения для напряжения сигнальной обмотки:
![]() ,
,
здесь Δφ – расстояние между сигнальной обмоткой и осью, перпендикулярной потоку статора.
Для малых углов крутизна чувствительного элемента рассчитывается:
![]() ,
[В/рад].
,
[В/рад].
При малых модулях строящегося вектора напряжение мало, и мала крутизна чувствительного элемента. Поэтому построение будет производиться с большой ошибкой.
При больших модулях, вследствие увеличения крутизны чувствительного элемента, может быть нарушена устойчивость следящей системы. В связи с этим в схему построения вектора вводится специальное КУ, осуществляющее автоматическое регулирование коэффициента усиления одного из каскадов усиления (АРУ). Работа схемы АРУ происходит в функции строящегося вектора. Для этой цели может использоваться напряжение U2 квадратурной обмотки ротора СКВТ.
АРУ осуществляется, обычно, на каком – либо нелинейном элементе. КУ должно работать так, чтобы при увеличении U2, и, соответственно, при увеличении крутизны чувствительного элемента, коэффициент усиления усилителя уменьшался по гиперболической зависимости, тогда их произведение будет оставаться постоянным.
kчэ·ky=const,
что обеспечит работу следящей системы при постоянном коэффициенте усиления разомкнутой цепи.
Вопросы самоконтроля:
Принцип действия самонастраивающихся систем.
Математическое описание самонастраивающихся систем.