

Примеры синтеза систем комбинированного типа
К системам комбинированного типа относятся все робототехнические системы. Это объясняется тем, что все команды управления для таких систем вырабатываются информационными управляющими системами. Требования к системам комбинированного типа:
- диапазон мощности до 1000 Вт;
- допустимые ошибки по перемещению, если поворот на 1 угл. мин. и поступательное перемещение 0,001 мм.
В связи с наличием таких высоких требований по точности в комбинированных локальных систем используются двигатели постоянного тока с помощью от 0,005 до 0,45 кВт и тиристорные преобразователи.
Функция исполнительного модуля в электрических приводах в данных системах выполняет электромеханических модуль. В его состав в общем случае должны входить: исполнительный двигатель, силовой редуктор, датчик угла скорости и момента.

Рисунок 41 – Для электромеханического привода
В качестве усилительно преобразующих устройств могут быть использованы полупроводниковые преобразователи, либо силовые вентили. По типу исполнительных приборов работы можно разделить на пневматические, гидравлические и электромеханические.
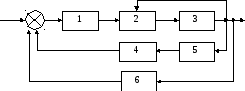
Рисунок 42 – Функциональная схема любого привода
1 – усилители;
2 – двигатель и передающий механизм;
3 – рабочий орган;
4 – параллельное КУ;
5 – датчик скорости;
6 – датчик положения.
Зависимость мощности прибора к диапазону мощности степеней свободы.
Все СУ роботов выполняются на базе микропроцессорной техники, не может быть аналогового управления.
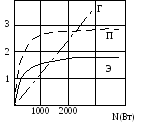
Рисунок 43
Пример. Функциональная схема следящего промышленного робота РПП-25.
Используется электродвигатель постоянного тока (ЭД) и тиристорный преобразователь (ТП).
Система состоит из двух контуров: регулирования скорости с датчиком скорости ДС и регулятором скорости РС и регуляторным положением с датчиком положения ДП и регулятором положения РП. РС – это ПИ-регулятор, а РП – это П-регулятор. Выходной сигнал с РС поступает на вход системы управления ТП.
Сенсорные устройства. Датчики роботов.
Предназначение для получения информации по состоянию внешней среды, технологического оборудования о состоянии самого робота.
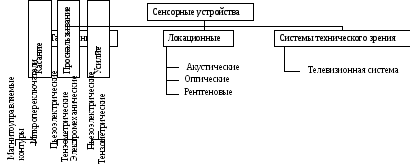
Рисунок 44 – Структурная схема серийно выпускаемого устройства циклового управления УМЦ-100

Рисунок 45
Система построена в виде набора функциональных узлов с общим направлением от центрального блока на ЭВМ. В качестве программонакопителя используется энергонезависимая ОЗУ на интегральных микросхемах и ПЗУ. Устройство имеет достаточно развитую систему команд. Перспективное направление для циклических СУ является использование в их структуре однокристальных ЭВМ, МП-ов и специализированных ПРГ контроллеров.
Позиционные лсу
Основными техническими характеристиками ЛСУ данного класса являются число управляемых координат 3-8; объект памяти программ 100-2500 (кадры); число технологических команд обмена информацией с внешним оборудованием 15-128; тип привода следящий или дискретный.
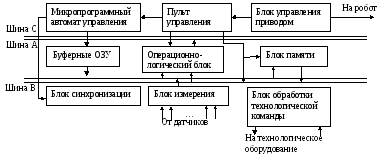
Рисунок 46 – Устройство ЧПУ типа УПН 772
Оно построено по типу синхронного микропроцессорного автомата МПА с конечным числом состояний и жестким циклом управления, МПА предназначен для формирования управляющих микрокоманд, в соответствии с алгоритмом функционально позиционного устройства.
Центральное управление – технологическая обработка осуществляется операционно-логическими, которые вместе с МПА представляет собой специальный вычислитель. Основным программонакопителем в системе УПН 772 является кассетный накопитель на магнитной ленте. Информация в КНМЛ 600 килобит формируется по зонам. В одной зоне может быть записано 1 или несколько программ. Связь между зонами осуществляется с помощью команд условного или безусловного переходов.
В режим записи и чтения информации обмен идет через ОЗУ объектом примерно 128 кадров.
Пульт управления предназначен для задания режимов работы и организации управления в режимах обучения, поиск кадров программы.