

6.1 Построение желаемой лачх и лфчх дискретной системы
Желаемой называют асимптотическую ЛАЧХ разомкнутой системы, имеющей желаемые (требуемые) статические и динамические свойства. ЖЛАЧХ состоит из трех основных асимптот: низкочастотной, среднечастотной и высокочастотной. Среднечастотная асимптота ЛАЧХ разомкнутой системы и ее сопряжение с низкочастотной определяют динамические свойства системы – устойчивость и показатели качества переходной характеристики.
Поскольку в исходной САУ присутствует дискретное устройство, построение желаемой ЛАЧХ (ЖЛАЧХ) ведется методом запретных зон.
Построение
ЖЛАЧХ начинаем с построения запретной
зоны, геометрия которой определяется
положением рабочей точки. Пусть на входе
системы известны максимальное по модулю
значение первой производной
 (скорости) и максимальное по модулю
значение второй производной
(скорости) и максимальное по модулю
значение второй производной
 (ускорения)
входного сигнала g(t).
(ускорения)
входного сигнала g(t).
Частота рабочей точки определяется выражением (6.1).
 (
с-1) (6.1)
(
с-1) (6.1)
Найдем
значение L( ),:
),:

Примем
максимальную статическую ошибку
 ,
тогда из (6.2) получим:
,
тогда из (6.2) получим:

Следовательно, рабочая точка имеет координаты (2; 40). Через полученную точку Ар проводим прямую с наклоном –20 дБ/дек. Данная прямая ограничивает сверху «запретную зону».
По
номограмме Солодовникова (рисунок 14) и
желаемому перерегулированию
 ,
колебательности (М=1.3) и времени
регулирования (tр=0,25
c)
определяем частоту среза:
,
колебательности (М=1.3) и времени
регулирования (tр=0,25
c)
определяем частоту среза:
 ,
(6.4)
,
(6.4)
 (с-1).
(6.5)
(с-1).
(6.5)



Рисунок 14 – Номограмма Солодовникова
Определим верхнюю границу среднечастотной области:
 (дБ)
(6.6)
(дБ)
(6.6)
Определим нижнюю границу среднечастотной области:
 (дБ). (6.7)
(дБ). (6.7)
Наклон ЖЛАЧХ в среднечастотной области равен –20 дБ/дек. Наклон ЖЛАЧХ в высокочастотной области должен быть близким к наклону исходной ЛАЧХ. В низкочастотной области желаемая ЛАЧХ совпадает с реальной. Остается сопрячь НЧ и СЧ области линией с наклоном, кратным -20 дБ/дек, в нашем случае проводим линию с наклоном -40 дБ/дек. Построенная желаемая ЛАЧХ приведена на рисунке 15.
РТ Запретная
зона 0
дб/дек -40
дб/дек -20
дб/дек -40
дб/дек -20
дб/дек λ1 λ2 λ3 λ4 λср





























Рисунок 15 – Построение ЖЛАЧХ системы
Частоты сопряжения желаемой ЛАЧХ:
λ1 = 0.35 c-1; λ2 = 8.9 c-1; λ3 = 90.2 c-1; λ4 = 18365 c-1.
Найдем коэффициент усиления из выражения:

Получим k=3311.3.
Таким образом, передаточная функция желаемой разомкнутой системы примет вид:

По
выражению
 построим ЖЛАЧХ, ЖЛФЧХ, и определим запасы
устойчивости.
построим ЖЛАЧХ, ЖЛФЧХ, и определим запасы
устойчивости.
Построенные желаемые ЛАЧХ и ЛФЧХ приведена на рисунках 16 и 17.
ΔL



Рисунок 16 – Построение ЖЛАЧХ системы




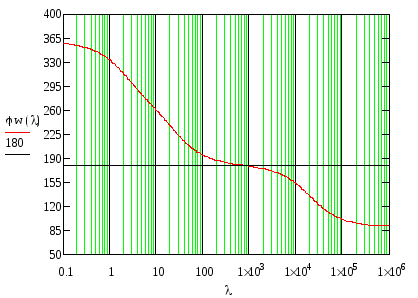
Рисунок 17 – Построение ЖЛФЧХ системы
Из графиков (Рисунок 16 и 17) определим запасы устойчивости:
-
запас по амплитуде: ΔL=42дБ;
-
запас по фазе:
 = 340.
= 340.
6.2 Построение лачх корректирующего устройства
Найдем передаточную функцию последовательного корректирующего устройства по формуле:
Получим:

С
помощью математического редактора
Mathcad
построим ЛАЧХ корректирующего устройства
по выражению
 .
ЛАЧХ изображена на рисунке 18.
.
ЛАЧХ изображена на рисунке 18.
Lр(λ)
Lж(λ)
Lк(λ)

Рисунок 18 – Построение ЛАЧХ корректирующего устройства