

Вопрос 6-9. Перечислить и объяснить основные способы регулирования частоты вращения асинхронного двигателя.
Ответ 6-9 : Частота вращения АД с кз ротором дается формулой:
n=60 f / p
Следовательно частоту вращения асинхронного двигателя можно регулировать изменяя:
а) частоту питающей сети; (используют силовые частотные преобразователи двигатели ).
б) изменяя число пар полюсов( переключая число катушек статора).
В настоящее время используются оба метода.
Вопрос 6-10: в чем особенности пускового режима асинхронного двигателя?
Ответ 6-10 : При прямом пуске АД ток потребляемой из сети в 5-8 раз превышает номинальный ток, при этом пусковой момент мал.. Поэтому применяют различные способы уменьшения пускового тока .
1) Уменьшают напряжения питающей сети используя переключение с треугольника на звезду, используя автотрансформаторы.
2) Используют роторы в виде 2-го беличьего колеса. В момент пуска при больших токах суммарное индуктивное сопротивление ротора зависит от скольжения. С увеличением скольжения оно увеличивается, при уменьшении уменьшается. Это позволяет создавать хороший пусковой момент и уменьшать пусковой ток.
Вопрос 6-11: Перечислить и сравнить различные способы пуска асинхронного двигателя с короткозамкнутым ротором.
Ответ 6-11: Пусковые свойства АД определяются следующими величинами:
Пусковым током, начальным пусковым вращающим моментом, плавностью и экономичностью пускового процесса, длительностью пуска.
Способы пуска асинхронного с короткозамкнутым ротором:
1) Прямой- непосредственное подключение к сети. При этом пусковой ток IП составляет 6÷8 Iном, пусковой момент 1÷2 Мном. Метод применим для двигателей малой и средней мощности <200квт. Частые прямые включения мощного двигателя могут привести к колебаниям энергии в силовой сети, что опасно для нее.
2) Уменьшают напряжение питающей сети используя переключение с треугольника на звезду, Метод применим для двигателей малой и средней мощности <200квт. Уменьшение напряжения на обмотках происходит в √3 раз, а пусковой ток в 3 раза.
**) Уменьшение напряжения на обмотках может уменьшать пусковой момент и он станет меньше требуемого т.е меньше момента нагрузки. Ротор просто не сможет вращаться !!!.
3) используя регулируемые автотрансформаторы, при этом уменьшение напряжения в √2 раз вызывает уменьшение пускового тока и пускового момента в 2 раза.
4. Включают в каждую фазу по дросселю(реактору). Дроссель ограничивает пусковой ток, но одновременно уменьшается пусковой момент.
5) Используют роторы в виде 2-го беличьего колеса. В током роторе суммарное индуктивное сопротивление 2-х беличьих колес зависит от скольжения. С увеличением скольжения оно увеличивается, при уменьшении уменьшается. Это позволяет создавать хороший пусковой момент и уменьшать пусковой ток.
Вопрос 6-12: Объяснить особенности рабочих характеристик асинхронного двигателя.
Ответ 6-12: Рабочие характеристик асинхронного двигателя это зависимости n, M, сosφ, I1, P1 , КПД-η от полезной мощности на валу Р2. представлены на рис 6-12.

а) Зависимость η=f(P2)
КПД двигателя η= P2/ P1= P2/ ΔР+ P2
P 1
–мощность
поступившей из секи в двигатель,
1
–мощность
поступившей из секи в двигатель,
P2 –мощность преобразованная полезную механическую энергию,
P1= ΔР+ P2
ΔР= мощность всех потерь в двигателе: электрических и магнитных потерь в статоре, электрических потерь в роторе и механических потерь ( трение в подшипниках , трение о воздух) .Потери в обмотках изменяются как I2 . Т.о. по мере роста нагрузки ток двигателя растет, а потери растут быстрее. Поэтому в начале по мере роста нагрузки КПД растет быстро, а затем медленно и достигает максимума при 70-75% нагрузки. При дальнейшем увеличении нагрузки Р2 потери значительно возрастают и КПД уменьшается.
б) Зависимость М=f(P2)
По определению в статическом режиме Мэм=Мнагрузки поэтому М эм= P2/ ω2
где ω2= ω1 ·(1-S) угловая частота вращения ротора.
ω1- угловая частота вращения магнитного поля , S-скольжение.
Поэтому зависимость М=f(P2) линейная.
в) Зависимость сosφ =f(P2)
В АД имеет место два энергетических процесса:
а) Необратимый расход активной энергии Р1 и
б) Обратимый процесс периодического изменения запаса энергии магнитного поля, мерой который является реактивная энергия Q1,
Соотношение
между активной мощностью и реактивной
мощностью оценивается коэффициентом
мощности двигателя
сosφ
=Р1/
S,
где
![]()
Коэффициент мощности двигателя зависит от нагрузки на его валу. При холостом ходе, энергия расходуется только на покрытие небольших электрических и магнитных потерь в статоре и незначительных механических потерь в подшипниках., Это означает, что активная мощность мала, а реактивная велика., поэтому сosφ мал. Обычно сosφхх =0,08÷0,15. С увеличением нагрузки активная мощность Р1 так же увеличивается , а реактивная Q1 изменяется незначительно. При нагрузке Р2 =Р2ном сosφ достигает максимума сosφmax =0,75÷0,95. При дальнейшем увеличении нагрузки из за увеличения потоков рассевания Q1 растет и сosφ уменьшается.
В виду массового применения АД в производстве, использование их с сosφ < 0,45 нежелательно, такие двигатели надо заменить на более экономичные.
г) Зависимость n2 =f(P2)
Скорость вращения и скольжение связаны зависимостью n2=n1(1-S).
В режиме холостого хода скольжение S~0 и скорость вращения ротора близка к скорости вращения магнитного поля : n2~n1. С увеличением нагрузки ток ротора возрастает и вызывает нагрев его обмотки. На этом участке электрические потери в роторе ΔР2э пропорциональны скольжению:
ΔР2э=s·Р2эм
где Р2эм электромагнитная мощность предаваемая от статора к ротору.
При нагрузке Р2 =Р2ном скольжение так же номинальное sном, =1.5÷7%, при это этом n2 = n2ном незначительно отличается от n1 . Можно говорить , что АД имеет жесткую характеристику. При увеличении нагрузки выше номинальной ( область перегрузки ) скорость n2 начинает уменьшаться и при нагрузки выше критической Р2> Р2крит двигатель останавливается .
д) Зависимость S =f(P2)
З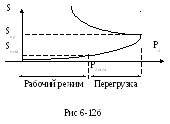 ависимость
скольжения S
=f(P2)
имеет вид
(Рис 12б):
ависимость
скольжения S
=f(P2)
имеет вид
(Рис 12б):
В режиме холостого хода скольжение
S = 0. С увеличением нагрузки скольжение увеличивается. При нагрузке Р2 =Р2ном скольжение номинальное sном, =1.5÷7%. При дальнейшем увеличении нагрузки P2
(область перегрузки) скольжение быстро возрастает и достигает критического значения Sкр. Дальнейшее увеличение нагрузки приводит к увеличению скольжения и неустойчивому режиму работы двигателя или к его остановке.
е) Зависимость I1=f(P2)
Зависимость тока статора I1 от нагрузки P2 имеет вид (Рис 12а):
Между током статора I1 и током ротора I2 существует трансформаторная связь
Ток статора согласно уравнению для МДЖС имеет вид: I1=I10-I2
где I10 ток холостого хода. I10 не зависит от нагрузки ,
I2-тока ротора . I2 так же как и в трансформаторах зависит от нагрузки.
Поэтому зависимость I1 увеличивается с увеличением P2 .
В режиме холостого хода I1=I10. и составляет от 20 до 75% от номинального тока статора I1ном.
В момент пуска ток ротора I2 = I2пуск =(6÷8) I1ном.