

Вопросы и задания
1. Обоснуйте целесообразность применения в МПСУ микросхемы ПИТ.
2. Поясните функциональную схему ПИТ.
3. Для чего служат управляющее слова таймера?
4. Основываясь на схеме, определите адресные пространства микросхем памяти (ПЗУ и ОЗУ), ПИТ и ПКП.
5. Основываясь на схеме, определите адреса ВУ ввода (кнопки П, контакт реле давления РД) и вывода (контактора), виды команд работы с ВУ.
6. . Составьте программу настройки ПИТ на заданную выдержку времени.
7. Поясните работу релейной схемы управления насосом с контролем давления.
8. Поясните работу схемы формирования счетных импульсов, следующих с частотой сети.
9. Поясните алгоритм управления насосом с контролем давления. Зачем создается копия порта С?
10. Поясните исполнение на сигнальном уровне команд блока инициализации программы.
11. Поясните исполнение на сигнальном уровне блоков основной программы управления насосом.
12. Поясните исполнение на сигнальном уровне команд блока обслуживания прерывания при нажатии кнопки С или отсутствии давления в течение 20 с.
1.16. Мпсу с вводом-выводом аналоговой информации
МПСУ могут управлять объектами с использованием аналоговой информации, если в состав МПСУ введены аналогоцифровые (АЦП) и цифроаналоговые (ЦАП) преобразователи.
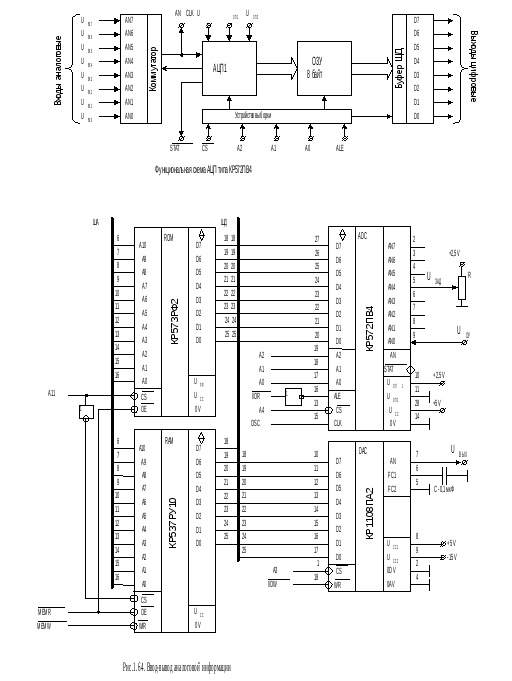
В качестве АЦП в МПСУ целесообразно применять ИМС типа КР572ПВ4, которая обеспечивает работу по 8-ми каналам аналоговых данных и имеет стандартный интерфейс для подключения к шинам МП [6]. Функциональная схема АЦП приведена на рис.1.64. Работа АЦП тактируется синхроимпульсами CLK, частота которых равна 2,5 МГц. 8 аналоговых сигналов UBX0…UBX7 поступают на аналоговый коммутатор, который соединяет с одновходовым АЦП1 только один аналоговый сигнал AN в очередности: UBX0, UBX1,… UBX7. В течение 32 мкс сигнал преобразуется АЦП1 в цифровую форму размером 1 байт и цифровой код переписывается в соответствующую ячейку ОЗУ емкостью 8 байт. По истечении 32·8=256 мкс (8 – количество аналоговых входов) все ячейки ОЗУ будут заполнены кодами всех 8-ми входных аналоговых сигналов. Далее будет следовать обновление кодов в соответствии с текущими значениями аналоговых сигналов.
Считывание
кодов из ОЗУ производится по команде
IN, адресная информация которой позволяет
сформировать сигнал
![]() =0
и битами А2А1А0 выбрать для чтения ячейку
памяти ОЗУ, а сопровождающий эту команду
сигнал чтения
=0
и битами А2А1А0 выбрать для чтения ячейку
памяти ОЗУ, а сопровождающий эту команду
сигнал чтения
![]() с помощью инвертора преобразуется в
импульс единичного строба ALE,
по которому выбранная ячейка ОЗУ
соединяется с буфером ШД АЦП.
с помощью инвертора преобразуется в
импульс единичного строба ALE,
по которому выбранная ячейка ОЗУ
соединяется с буфером ШД АЦП.
Вид преобразуемых аналоговых сигналов и коды выходных цифровых сигналов зависят от опорных напряжений UОП1 и UОП2 (табл.1.3), подводимых к АЦП1 через внешние выводы ИМС АЦП. Эти зависимости устанавливаются для всех восьми аналоговых сигналов одновременно.
Таблица 1.3
|
UОП1 |
UОП2 |
UВХ |
Соответствие выходных кодов входным напряжениям |
|
+2,5 V |
0 |
0…+2,5 V |
0000.0000 (0 V)…1111.1111 (+2,5 V) |
|
0 |
-2,5 V |
0…-2,5 V |
0000.0000 (-2,5 V)…1111.1111 (0 V) |
|
1,25 V |
-1,25 V |
-1,25…+1,25 V |
0000.0000 (-1,25 V)…1000.0000 (0,0049 V)…1111.1111 (+1,25 V) |
Из
множества ИМС ЦАП [6] рассмотрим ЦАП типа
КР1108ПА2. Вход ЦАП 8-разрядный (рис.1.6 и
рис.1.64). Управление ЦАП осуществляется
стандартными сигналами
![]() и
и
![]() .
Вид выходного аналогового напряжения
UВЫХ,
снимаемого с AN,
зависит от способа подключения вывода
FC1
на землю (табл.1.4).
.
Вид выходного аналогового напряжения
UВЫХ,
снимаемого с AN,
зависит от способа подключения вывода
FC1
на землю (табл.1.4).
Таблица 1.4
|
Вывод FC1 заземлен |
Соответствие выходного напряжения входным кодам |
|
- напрямую |
0000.0000 (0 V)…1111.1111 (+2,5 V) |
|
- через С=0,1 мкФ |
0000.0000 (-1,25 V)…1000.0000 (0,0049 V)…1111.1111 (+1,25 V) |
Питание ЦАП двухполярное: -15 В и +5 В. ИМС имеет два вывода земли: 0D V - земля цифровая и 0A V - земля аналоговая.
Р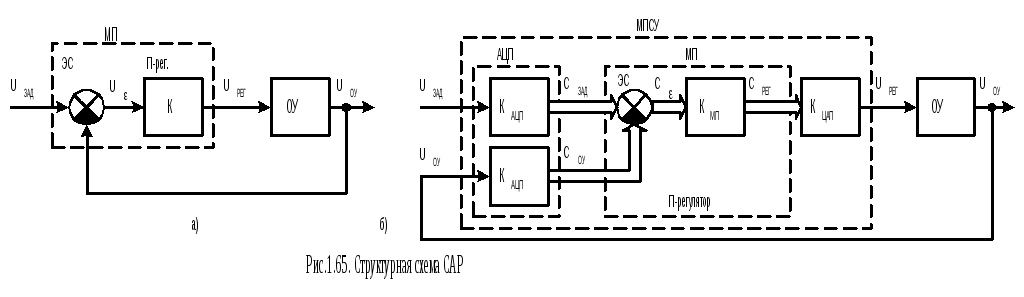 ассмотрим
пример реализации на основе МП системы
автоматического регулирования по
структурной схеме, приведенной на
рис.1.65. Примем регулятор П-типа с
коэффициентом передачи К=2. МП должен
выполнять умножение на коэффициент КМП
цифрового кода сигнала
ассмотрим
пример реализации на основе МП системы
автоматического регулирования по
структурной схеме, приведенной на
рис.1.65. Примем регулятор П-типа с
коэффициентом передачи К=2. МП должен
выполнять умножение на коэффициент КМП
цифрового кода сигнала
![]() ,
равного разности кодов сигналов UЗАД
и UОУ.
Принципиальная схема САР приведена на
рис.1.64. АЦП работает в однополярном
режиме, а ЦАП работает в двухполярном
режиме. Сигналы UЗАД,
UРЕГ
и UОУ
аналоговые, а сигналы СЗАД,
СОУ,
Сε
и СРЕГ
цифровые (коды).
,
равного разности кодов сигналов UЗАД
и UОУ.
Принципиальная схема САР приведена на
рис.1.64. АЦП работает в однополярном
режиме, а ЦАП работает в двухполярном
режиме. Сигналы UЗАД,
UРЕГ
и UОУ
аналоговые, а сигналы СЗАД,
СОУ,
Сε
и СРЕГ
цифровые (коды).
Коэффициенты передачи для ИМС АЦП типа КР572ПВ4 и ЦАП типа КР1108ПА2, примененных в схеме на рис.1.64, равны
![]() (1.1)
(1.1)
Если К – коэффициент передачи П-регулятора для аналоговых сигналов (рис.1.65а), а КМП – коэффициент передачи, реализуемый программой МП (рис.1.65б), то из сопоставления рис.1.65а и 1.65б получаем
![]() (1.2)
(1.2)
Это выражение справедливо для любых типов ИМС АЦП и ЦАП. Для примененных в схеме ИМС АЦП и ЦАП с учетом (1.1) получим: КМП=К=2.
Умножение на 2 в МП может быть выполнено циклическим сдвигом кода влево с использованием команды RLC. Например, при сдвиге влево кода 0010.1110В=2ЕН=4610 получим код 0101.1100В=5СH=9210.
А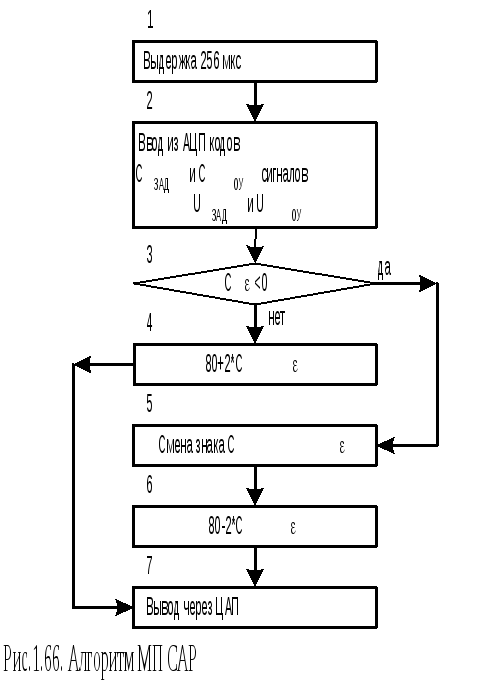 лгоритм
МП системы автоматического регулирования
приведен на рис.1.66, а программа – на
рис.1.67.
лгоритм
МП системы автоматического регулирования
приведен на рис.1.66, а программа – на
рис.1.67.
Блок 1: Создание выдержки времени не менее 256 мкс, чтобы ОЗУ АЦП после включения питания схемы или сброса заполнилось верными данными.
Блок 2: Ввод через АЦП кодов сигналов UЗАД и UОУ.
Блок
3: Вычисление
![]() и переход по знаку результата.
и переход по знаку результата.
Блок 4: Подготовка кода для вывода положительного напряжения сигнала UРЕГ. При входном коде 80 ЦАП его выходной сигнал равен 0,0049 В≈0 В.
Блок
5: Смена знака кода
![]() ,
так как операция умножения
,
так как операция умножения
![]() на 2 через сдвиг RLC кода верна только для
положительных чисел.
на 2 через сдвиг RLC кода верна только для
положительных чисел.
Блок 6: Подготовка кода для вывода отрицательного напряжения сигнала UРЕГ.
Блок 7: Вывод сигнала UРЕГ через ЦАП.
|
Адрес |
Код команды |
Метка |
Мнемокод |
Комментарии |
|||
|
0000 |
3E |
2В |
|
|
М1 |
MVI 2В |
Выдержка времени в тактах 7+43·(5+10)=652, в микросекундах 652·0,4=260,8 мкс* |
|
0002 |
3D |
|
|
|
Цикл |
DCR A |
|
|
0003 |
C2 |
02 |
00 |
|
|
JNZ Цикл |
|
|
0006 |
DB |
E8 |
|
|
М2 |
IN E8 |
Ввод UОУ с адреса Е8Н=1110.1000В |
|
0008 |
57 |
|
|
|
|
MOV D, A |
Регистр D←аккумулятор А |
|
0009 |
DB |
EC |
|
|
|
IN EC |
Ввод UЗАД с адреса ЕСН=1110.1100В |
|
000B |
92 |
|
|
|
M3 |
SUB D |
Аккумулятор
А← |
|
000C |
FA |
17 |
00 |
|
|
JM M5 |
Переход
на М5, если
|
|
000F |
07 |
|
|
|
M4 |
RLC |
Аккумулятор
А←2· |
|
0010 |
57 |
|
|
|
|
MOV D, A |
Регистр D←аккумулятор А |
|
0011 |
3E |
80 |
|
|
|
MVI A, 80 |
Аккумулятор А←80 |
|
0013 |
8A |
|
|
|
|
ADC D |
Аккумулятор
А←80+2·| |
|
0014 |
C3 |
20 |
00 |
|
|
JMP M7 |
Безусловный переход на метку М7 |
|
0017 |
57 |
|
|
|
M5 |
MOV D, A |
Регистр D←аккумулятор А |
|
0018 |
3E |
00 |
|
|
|
MVI A, 00 |
Аккумулятор А←00 |
|
001A |
92 |
|
|
|
|
SUB D |
Аккумулятор
А←| |
|
001B |
07 |
|
|
|
M6 |
RLC |
Аккумулятор
А←2·| |
|
001C |
57 |
|
|
|
|
MOV D, A |
Регистр D←аккумулятор А |
|
001D |
3E |
80 |
|
|
|
MVI A, 80 |
Аккумулятор А←80 |
|
001F |
92 |
|
|
|
|
SUB D |
Аккумулятор
А←80-2· |
|
0020 |
D3 |
F7 |
|
|
М7 |
OUT F7 |
Вывод UРЕГ по адресу F7H=1111.0111B |
|
Рис.1.67. Программа МП САР |
|||||||
* В приведенном расчете:
- 7, 5 и 10 – длительности в тактах выполнения команд MVI, DCR и JNZ;
- 43 – десятичный эквивалент 16-ричного кода 2BН (количества циклов);
- 0,4 – длительность машинного такта МП, мкс.