

9.Синтез последовательного корректирующего устройства.
Обратимся к рис. 4. Используя формулу:
Lку(ω)= Lж(ω)- Lисх(ω),
построим ЛАЧХ корректирующего устройства Lку(ω) передаточная функция которого будет:

т.е. Т1=10с;Т2=1249с.
В соответствии с видом Lку(ω) и его передаточной функции Wку(p) из справочных материалов по корректирующим устройствам найдем подходящию электрическую схему пассивного четырехполюсника(рис.6)
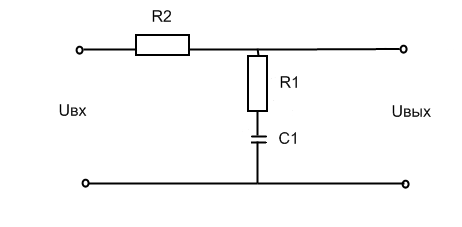
Рис.6 Электрическая схема корректирующего устройства.
Электрические параметры Четырехполюсника R1,R2,C1 связаны с параметрами Т1 и Т2 ЛАЧХ корректирующего устройства Lку(ω) следующим соотношениями:
Т1=R1*C1; T2=(1+R2/R1)*T1.
Зададим, R1=105 Ом = 100ком получим
С1=Т1/R1=10-4(ф)=100 (мкф).
R2=(Т2/Т1-1)*R1=126*105=12.6(мОм).
10.Принципиальная Электрическая схема скорректированной сар.
Так как коэффициент усиления получившегося корректирующего устройства для частот, больших ω =0,0027 с-1,меньше единицы, т. е. ослабляет сигнал. то его(корректирующие устройство) необходимо ставить после усилителя.
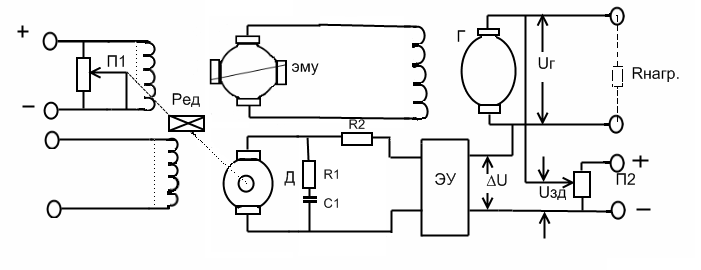
Рис.7 Принципиальная Электрическая схема скорректированной САР.
11.Заключение.
В данной Курсовой работе была следованна Система автоматического регулирования напряжения генератора, система была не устойчива, и было подобрано корректирующие устройство(пассивный четырехполюсник).
12.Список литературы.
1.Харитонов Ю.М., Зайцев О.Н., Теория Автоматического управления. Непрерывные линейные системы. -Чебоксары: ЧИ МГОУ,2007
2.Бесекерский В.Л., Полов Е. II.
Теория систем автоматического управления .,
Изд. 4-е, перераб. и доп. — СПб, Изд-во «Профессия», 2003.