

1 Техническое задание
Необходимо разработать систему автоматического управления, позволяющую осуществлять работу системы капельного орошения почвы. Структурная схема данной системы приведена на рисунке 1.
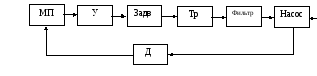
Рисунок 1 – Структурная схема САУ капельным орошением почвы
В состав САУ входят следующие основные устройства:
- микропроцессор (МП);
- усилитель напряжения (У);
- задвижка (Задв);
- трубопровод (Тр);
- фильтр;
- насос ;
- датчик-преобразователь (Д).
Работает система следующим образом.
Значение давления воды преобразуется в токовый сигнал 0 – 5 мА датчиком-преобразователем «Сапфир 22ДИ» и подаётся в микропроцессорный контроллер, включающий в себя АЦП. Микроконтроллер в соответствии с алгоритмом управления формирует напряжение управления U2, которое через усилитель напряжения управляет задвижкой. В случае превышения давления выше заданного значения, задвижка перекрывает поток воды в трубопроводе. Это может произойти в случае засорения трубопровода или фильтра.
Технические данные системы капельного орошения почвы:
- расход воды 3 – 7 м3/ч;
- давление в трубопроводе 7 Бар;
- управляющее напряжение 24 В;
- напряжение питания 220 В, 50 Гц;
- диаметр трубопровода 25 мм;
- общая длина трубопровода 30 м;
- температура воды 7 – 30 оС;
Требования к проектируемому САУ:
1. Время регулирования tp 15 c;
2. Перерегулирование 30 %.
2 ВЫБОР ЭЛЕМЕНТНОЙ БАЗЫ
2.1 Выбор микропроцессорной системы
Микропроцессор – программно-управляемое устройство обработки информации, выполненное на одном или нескольких кристаллах, способное выполнять большое количество функциональных операций. Выпускается типовой ряд микропроцессоров с различным быстродействием, числом разрядов, входов, выходов и т. п. Выбираем микропроцессор 8051АН.
Микропроцессор 8051АН:
- разрядность слова данных 8;
- технология n-МОП;
- емкость встроенного ОЗУ 1К8;
- число основных команд 62;
- максимальная тактовая частота 10000 кГц;
- наибольшее время выполнения команды 6.8 мкс;
- число уровней прерывания 4;
- напряжение питания 5 В.
В выбранном микропроцессоре (микропроцессорном комплекте) присутствуют АЦП, ЦАП и алгоритм преобразования.
Примем передаточную функцию микропроцессора равной единице.
![]() .
.
2.2. Выбор усилителя напряжения
Усилитель напряжения будет состоять из блока питания с выходным напряжением 24 В, выходным каскадом транзисторов КТ 8101,КТ 8102.
- напряжение на входе источника питания, U п 220 B, 50 Гц;
- мощность потребления в режиме покоя , P п 100 мВт;
- напряжение на выходе , U вых 1.5 мВ ;
- напряжение на входе , Uвх 6 В;
Передаточную функцию усилителя напряжения принимаем равной коэффициенту усиления:
где Uвых – напряжение на выходе УПТ;
Uвх – напряжение на выходе МП.
![]() .
.
2.3 Выбор насоса
Для данной системы был выбран питательный насос ЦВК.
- подача 13.5 м3/ч;
- напор 100 м;
- мощность двигателя 2 кВт;
- число оборотов 3000 об/мин;
Передаточная функция насоса
![]() , где
, где
![]() ,
,
D1=0.02м
D2=0.04м
Ω = 0.5 м/c
Z = 8
Q = 13.5 м3/ч
H = 20м
![]() 0.9
0.9
 0.6
0.6
![]()
2.4 Выбор задвижки
- материал корпуса – нейлон + стекловолокно, резьба – латунь; - расход воды от 0,3 до 42 м3/час; - рабочее давление воды от 0.5 до 10 Бар; - напряжение управления соляноидной головкой 24 В; - потребляемая мощность 2 Вт; - ток запуска 190 мА; - рабочий ток 190 мА; - максимально допустимая температура воды 600 С; - имеются опции: ручного управления и ручной регулировки расхода воды.
![]()
![]() =0.2
=0.2
U = 24 В
P = 104 Па
![]()
2.5 Выбор фильтра
![]()
![]()
P = 12 КПа
Q = 13.5 м3/ч
![]()
![]()
2.6 Выбор трубопровода
![]()
![]()
![]()
P1= 1.2 КПа
P2= 1.1 КПа
y = 9810 кг/м3
h = 0.15 м
q = 1 м3/ч
![]() 9
9
![]() 10
10
![]()
2.7 Выбор датчика обратной связи
Выбираем преобразователь давления «Сапфир 22ДИ»
![]()
![]()
Р = 8 Бар
I = 40 мА
![]() =5
=5
Т = 0.18*К = 0.9
![]()
3 РАСЧЁТ ДАТЧИКА ОБРАТНОЙ СВЯЗИ
Сапфир 22ДИ
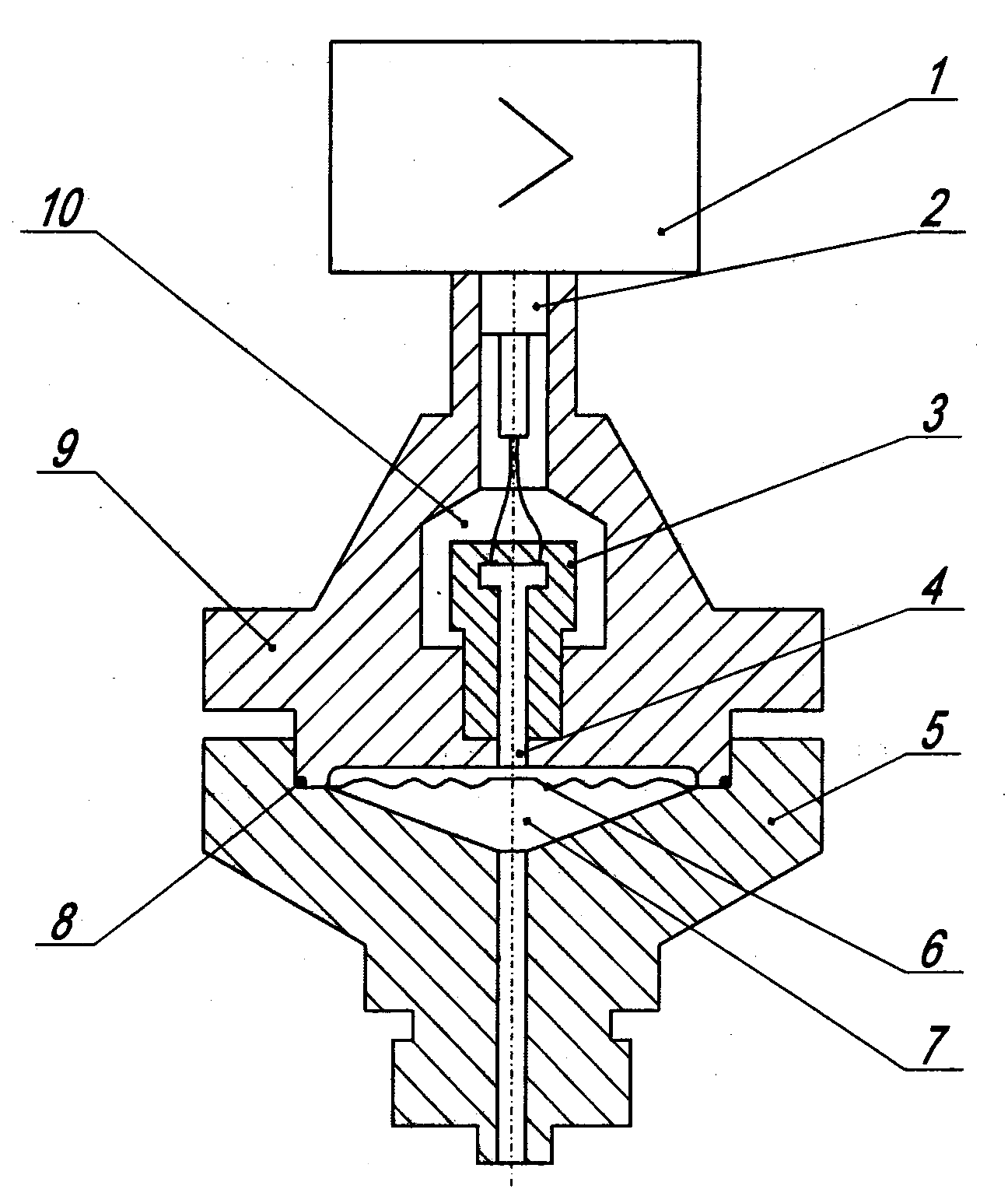
Рисунок 2 – Устройство датчика «Сапфир 22ДИ»
1 – Электронный преобразователь;
2 – штуцер электронного блока;
3 – тензопреобразователь;
4 – внутренняя полость тензопреобразователя;
5 – фланец корпуса;
6 – мембрана;
7 – камера;
8 – уплотняющая прокладка;
9 – основание преобразователя;
10 – внешняя полость.
Технические данные преобразователя:
модель 2180; верхний предел измерений, МПа 16;
выходной сигнал, mA 4 – 20;
предел допустимой погрешности, % 0,25;
питание постоянный ток;
напряжение питания, В 360,72;
материал мембраны сплав 36НХТЮ;
масса преобразователя, кг 3,0;
степень защиты от воды и пыли IP54;
климатическое исполнение УХЛ3.1.
![]()
![]()
![]()
Р = 8 Бар
I = 40 мА
![]() =5
=5
Т=f/c, где f=101*10-8 коэффициент вязкого трения
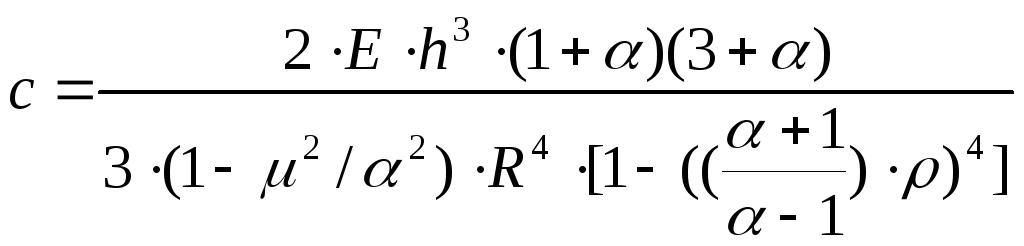 жесткость
мембраны
жесткость
мембраны
R=30 мм – рабочий радиус мембраны
h = 0.35 мм – толщина мембраны
Е = 2.11*1011 Па – модуль кпругости
p= 0.2 мм - относительный радиус жёсткого центра
α=3.64
µ= 0.3
с=1.12*10-6 , Т=101*10-8 /1.12*10-6 =0.9 с
![]()
4 РАСЧЁТ УСТОЙЧИВОСТИ СИСТЕМЫ
К неизменяемой части локальной системы управления относят типовые звенья, параметры которых физически изменить невозможно и передаточная функция которых по отношению к основному сигналу не равняется единице. Следовательно, к неизменяемой части относятся: усилитель, трубопровод, насос, задвижка, преобразователь давления, фильтр.
К изменяемой части относится микропроцессор, так как его передаточная функция зависит от управляющей программы и может меняться.
Подставляя рассчитанные передаточные функции отдельных звеньев в схему (рисунок 4) можно рассчитать передаточную функцию самой системы.

Рисунок 3 – Структурная схема САУ капельного орошения почвы.
Передаточные характеристики САУ капельного орошения почвы:
Процессор
![]()
Усилитель
![]()
Задвижка
![]()
Трубопровод
![]()
Фильтр
![]()
Насос
![]()
Датчик
![]()
Отсюда получим общую передаточную функцию:
![]()
Подставляя численные значения получим:
![]()
Определим устойчивость полученной системы, используя критерий устойчивости Гурвица, который заключается в том, что для того, чтобы система была устойчива необходимо и достаточно, чтобы все миноры определителя Гурвица были положительны.
![]()
![]()
![]()
![]()
![]()
Все коэффициенты характеристического уравнения положительные. Значит необходимое условие устойчивости выполняется.
Составляем определитель Гурвица.
Определяем значения миноров.
![]()

Все миноры определителя Гурвица положительны, значит вещественная часть корней характеристического уравнения отрицательна, и согласно теореме Ляпунова, САУ устойчива.
Для того чтобы определить прямые оценки качества системы построим переходный процесс проектируемой системы.
Построение переходного процесса САР выполняется на основе обратного преобразования Лапласа от передаточной функции системы автоматического регулирования в замкнутой форме. Преобразование по Лапласу от передаточной функции системы автоматического регулирования в замкнутой форме осуществляется в программе MathCAD:
![]()
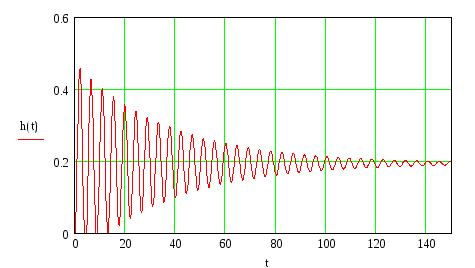


Рисунок 4 – Переходной процесс системы управления
капельным орошением почвы
Из рисунка видно, что система имеет гармонический затухающий переходный процесс.
Определим прямые оценки качества системы:
1. Время переходного процесса. tперех - время регулирования системы; определяется как интервал времени от момента приложения какого-либо воздействия до времени вхождения в пяти процентную трубку (5% от Yуст).
Определяем быстродействие системы. tперех = 140 с.
2. Перерегулирование (максимальная динамическая ошибка) – определяется выражением:
![]()
3. Колебательность n – число колебаний системы от момента воздействия на нее до перехода в установившееся состояние, n = 30.
4. Время нарастания регулируемой величины – время при котором выходная величина достигает своего максимального значения, tнар = 2 с.
В результате получили: время переходного процесса 140 сек., задано
15 сек.; перерегулирование 125%, задано 30%.
Чтобы определить косвенные оценки качества системы необходимо построить амплитудно-частотную характеристику системы, для этого в передаточной функции заменим p=jω:
![]()
![]()
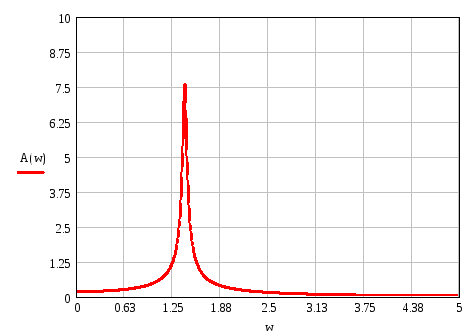


Рисунок 5 – Амплитудно-частотная характеристика САУ
капельным орошением почвы
Определим косвенные оценки качества:
1) Резонансная частота (частота, при которой АЧХ достигает своего максимального значения) ωР=1.4
2) Показатель колебательности:
![]()
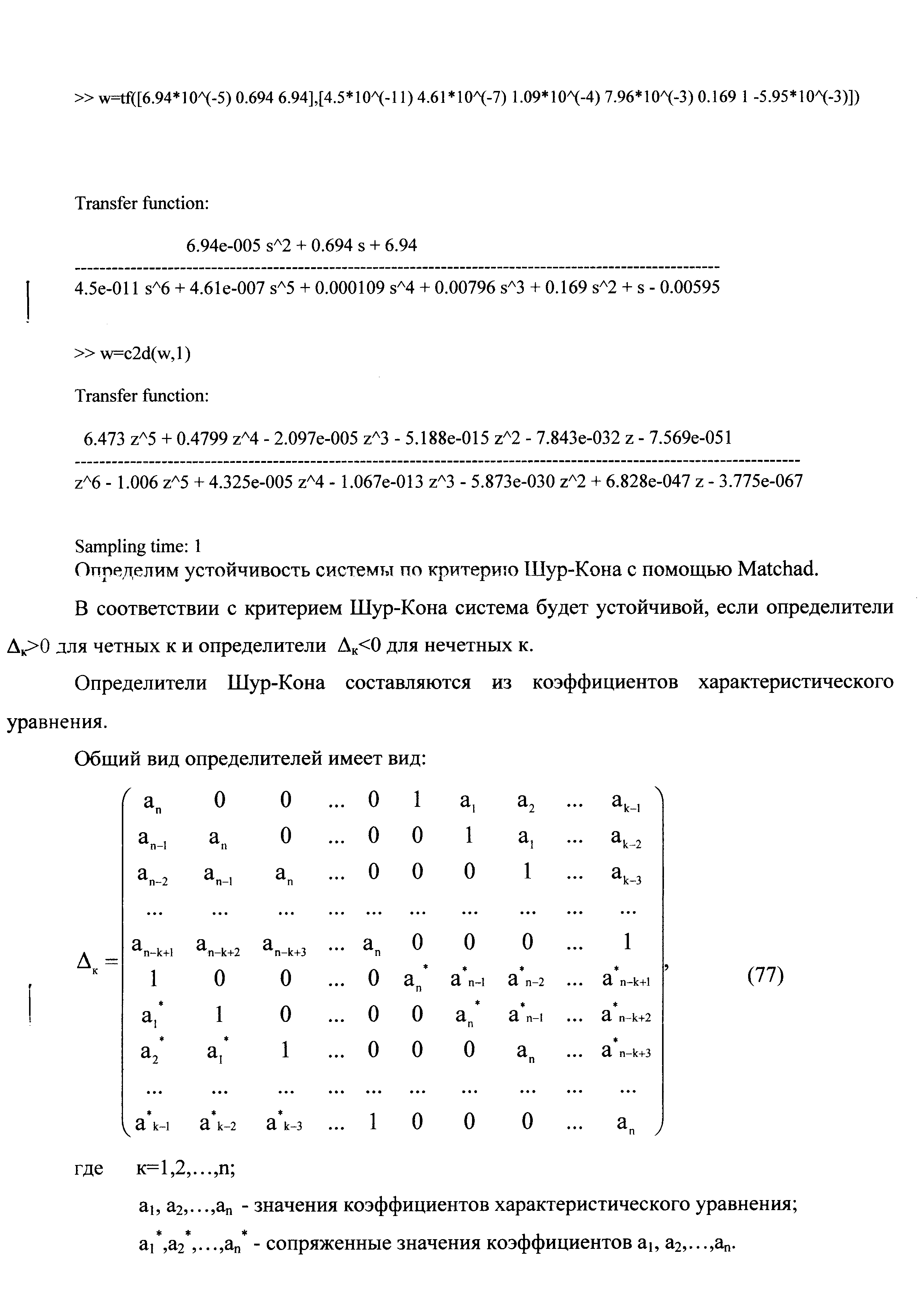
Проверим устойчивость САУ по критерию Шур-Кона.
Для того, чтобы импульсная САУ была устойчива, необходимо и достаточно, чтобы определители Шур-Кона с четным индексом были положительны, а с нечетным – отрицательны.
Проведем z-преобразование передаточной функции САУ.
![]() ,
,
где δ - разрядность АЦП микропроцессора.
Для
этого разложим передаточную функцию
замкнутой системы на элементарные
дроби. Для каждой дроби запишем
соответствующие z-преобразования.
Их сумму умножим на
![]() ,
и после подстановки времени дискретизации
Т=0.01 с и упрощений получим следующий
вид передаточной функции:
,
и после подстановки времени дискретизации
Т=0.01 с и упрощений получим следующий
вид передаточной функции:
![]()
Таким образом, получили характеристическое уравнение в z – форме вида:
![]()
Выпишем коэффициенты характеристического уравнения:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Из коэффициентов характеристического уравнения составим определитель.
Общий вид определителя:
где к=1,2,..,n;
а1, а2,…, аn – значения коэффициентов характеристического уравнения;
![]() – сопряженные
значения коэффициентов.
– сопряженные
значения коэффициентов.
Составим определители Шур-Кона.
![]()
![]()
![]()
![]()
![]()
Так как второй определитель отрицателен, следовательно, система является не устойчивой.
Переходный процесс дискретной замкнутой системы с шагом дискретизации Т=0.01 сек представим на рисунке 6:



Рисунок 6 – Переходный процесс замкнутой дискретной системы
5 ПОСТРОЕНИЕ ЛОГАРИФМИЧЕСКИХ ХАРАКТЕРИСТИК СИСТЕМЫ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
5.1 Построение логарифмической амплитудно-частотной характеристики
и логарифмической фазо-частотной характеристики
Для дальнейшего исследования, передаточную функцию разомкнутой системы подвергаем z – преобразованию.
Передаточная функция разомкнутой системы имеет вид:
![]()
![]()
![]() ;
;
![]()
![]() ;
;
![]()
![]()
Запишем
для каждой дроби соответствующее
z-преобразование
и умножим на
![]() при Т=0.01 с, получим:
при Т=0.01 с, получим:
![]()

Заменим z на выражение от псевдочастоты в программе Mathcad:
z=![]() ,
где
,
где
![]() ,
получим:
,
получим:


Упростив выражение, получим:
![]()
Для построения логарифмической амплитудной и фазовой характеристик, передаточную функцию разомкнутой системы представляют в виде произведения передаточных функций элементарных звеньев. Построим логарифмические характеристики неизменяемой части системы, применяя редактор MATLAB.
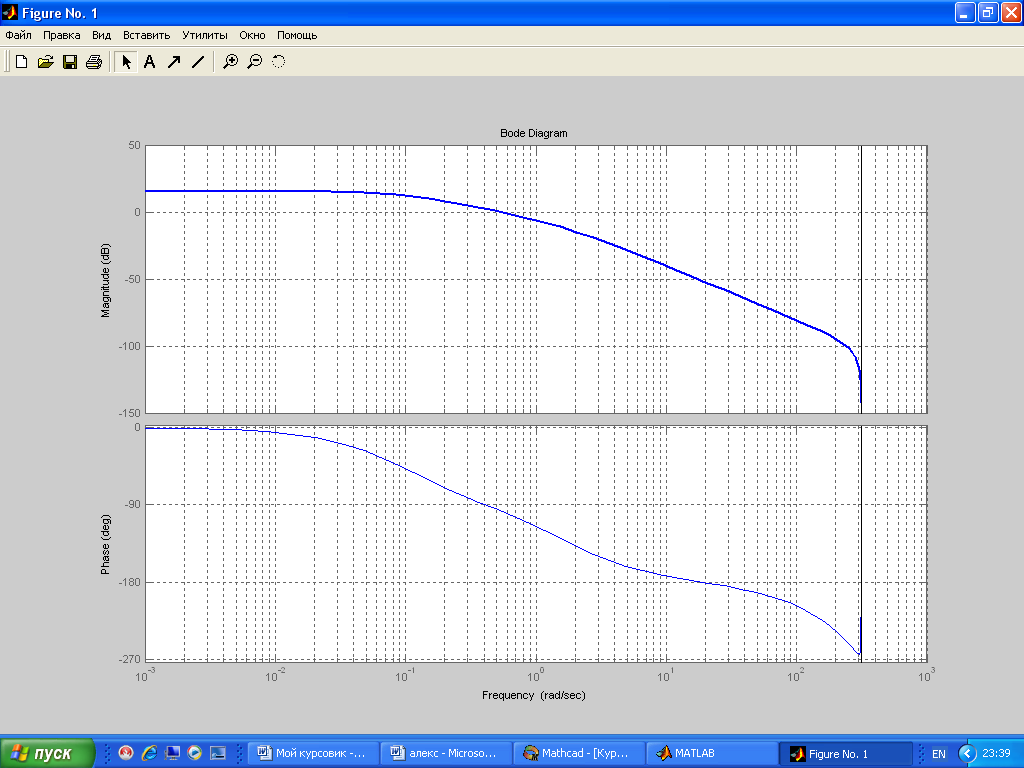


Рисунок 7 – ЛАЧХ, ЛФЧХ разомкнутой системы
Выполним анализ ЛАЧХ и ЛФЧХ и определим запасы устойчивости по амплитуде и фазе.
Запас устойчивости по амплитуде определяется превышением L(w) над осью lgw на частоте пересечения (w) с осью 180. Запас устойчивости по амплитуде Lз = 10*10-10.
20LgA=-50 ; LgA= - 2.5; А=3.16*10-3.
По графику аппроксимируем ЛАЧХ стандартными наклонами 0, -20, -40 дБ/дек. Получим частоты излома (сопряжения) λ1 = 0.08 c-1, λ2 = 2.5 c-1
Вывод: запасы устойчивости не соответствуют заданным в техническом задании, следовательно, система нуждается в коррекции.
5.2 Построение желаемой логарифмической амплитудно-частотной
характеристики и желаемой логарифмической фазо-частотной
характеристики
Для построения ЖЛАЧХ необходимы следующие исходные данные:
1. Максимальная допустимая ошибка = 0.01.
2. Перерегулирование ≤ 30 %.
3. Время регулирования tр = 15 сек.
4. Колебательность М = 1.05.
ЖЛАЧХ для дискретных систем строится методом запретной зоны. Для построения запретной зоны находим координаты рабочей точки, через которую будет проходить граница запретной зоны.
Значение частоты рабочей точки определяется по формуле:
![]() cек-1,
cек-1,
где
![]() ,
,
![]() - скорость и ускорение изменения входного
сигнала.
- скорость и ускорение изменения входного
сигнала.
Найдем значение амплитуды контрольной точки:
![]()
Найдем координаты контрольной точки Ар(0.02; 6)
Точка А(0.02; 6) является рабочей точкой для построения запретной зоны. Проводим через рабочую точку прямую с наклоном минус 20 дБ/дек. Зона находящаяся ниже построенной прямой является запретной и построение ЖЛАЧХ в этой зоне запрещено.
По
номограмме Солодовникова (рисунок 9) и
желаемому перерегулированию
![]() ,
времени регулирования (tр=15
c)
определяем частоту среза:
,
времени регулирования (tр=15
c)
определяем частоту среза:
![]()
Арифметическое вычисление частоты среза запишется в виде:
![]() рад/сек.
рад/сек.
![]() ;
;![]()
Условно ЖЛАЧХ разделяют на три части: высокочастотную, среднечастотную, низкочастотную. Низкочастотная часть ЛАЧХ определяет статическую
точность системы. Среднечастотная часть ЛАЧХ определяет запасы устойчивости и является наиболее важной. Чем больше наклон среднечастотной ЛАЧХ, тем труднее обеспечить хорошие динамические свойства системы. Высокочастотная часть ЛАЧХ играет незначительную роль в определении динамических свойств системы. Построение ЖЛАЧХ начинаем со среднечастотной части. Через точку среза проводим прямую с наклоном минус 20 дБ/дек.

Рисунок 8 - Номограмма Солодовникова
Определим среднечастотную область, с верхней границей
![]() (дБ)
и с нижней границей
(дБ)
и с нижней границей
![]() (дБ).
(дБ).

Рисунок 9 – ЖЛАЧХ, ЖЛФЧХ разомкнутой системы
Построенная желаемая ЛАЧХ лежит выше точки Ар, то есть не попадает в запретную область.
Передаточная функция ЖЛАЧХ определяется как совокупность интегрирующего, двух форсирующих и двух апериодических звеньев:
![]()
Коэффициент k и постоянные времени, определим из рисунка 9:
20lg k=45;
lgk=2.25;
k=177.8
![]() с.
с.
![]() с.
с.
![]() с.
с.
![]() с.
с.
С учетом рассчитанных значений:
![]() .
.
6 СИНТЕЗ КОРРЕКТИРУЮЩЕГО ЗВЕНА
6.1 Построение ЛАЧХ корректирующего устройства
Коррекция динамических свойств САР осуществляется для выполнения требований по точности, устойчивости и качеству переходных процессов.
Коррекция применяется также как средство обеспечения устойчивости неустойчивой системы или расширения области устойчивости, а также повышения качества переходного процесса.
Осуществляется коррекция с помощью введения в систему специальных корректирующих звеньев с особо подобранной передаточной функцией. Принципиально корректирующие звенья могут включаться либо последовательно с основными звеньями САУ, либо параллельно им (существуют и комбинированные способы включения). Соответственно, по способу включения в систему корректирующие звенья делятся на последовательные и параллельные.
Для обеспечения необходимой точности в разомкнутую цепь необходимо последовательно включить корректирующее устройство, т.е. необходимо произвести синтез последовательного корректирующего устройства.
Построим ЛАЧХ корректирующего устройства.
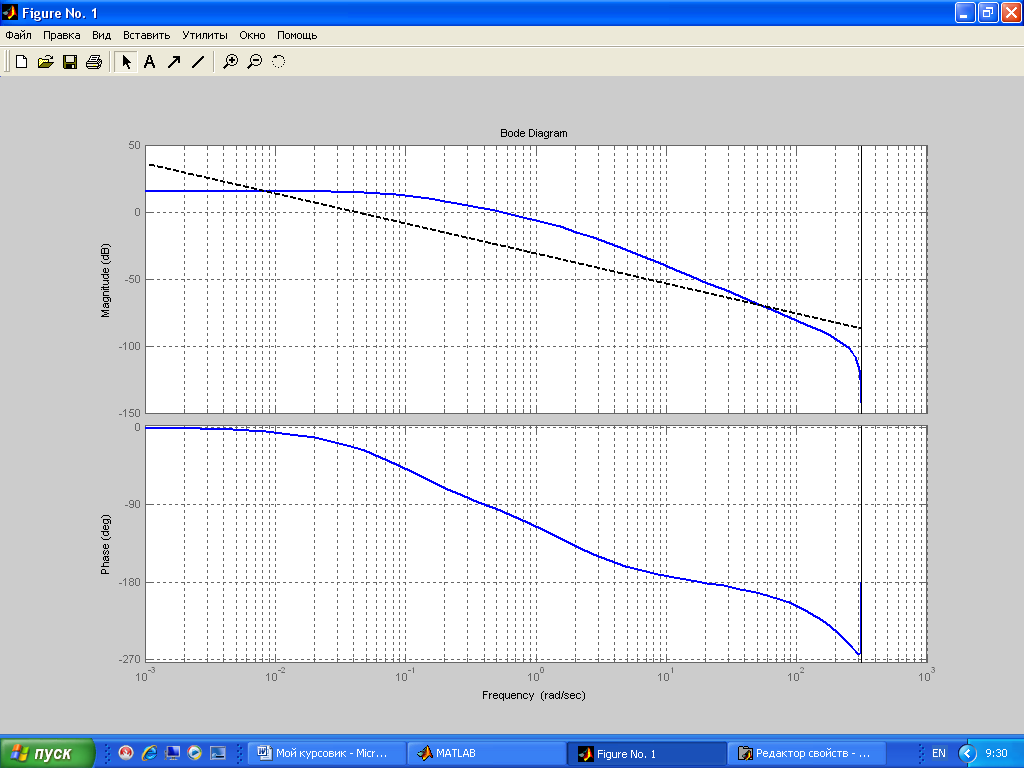








Рисунок 10– Графики ЖЛАЧХ, реальной ЛАЧХ и ЛАЧХ последовательно
го корректирующего устройства
![]()
6.2 Расчет корректирующего устройства
Из графика ЛАЧХ на рисунке 10 определим для корректирующего устройства:
1/T1=0.008; 1/T1=60. Зададим R1 =1 Мом, R2=360 кОм
![]()
![]()
![]() µF
µF
![]() nF
nF

Произведем анализ системы управления капельным орошением методом Найквиста (рисунок 12):

w=tf([11.2 905 997 5.83],[11.5 951 2.67*10^3 2.03*10^3 3.83*10^3 30.2])
Transfer function:
11.2 s^3 + 905 s^2 + 997 s + 5.83
----------------------------------------------
11.5 s^5 + 951 s^4 + 2670 s^3 + 2030 s^2
+ 3830 s + 30.2
>> nyquist(w)
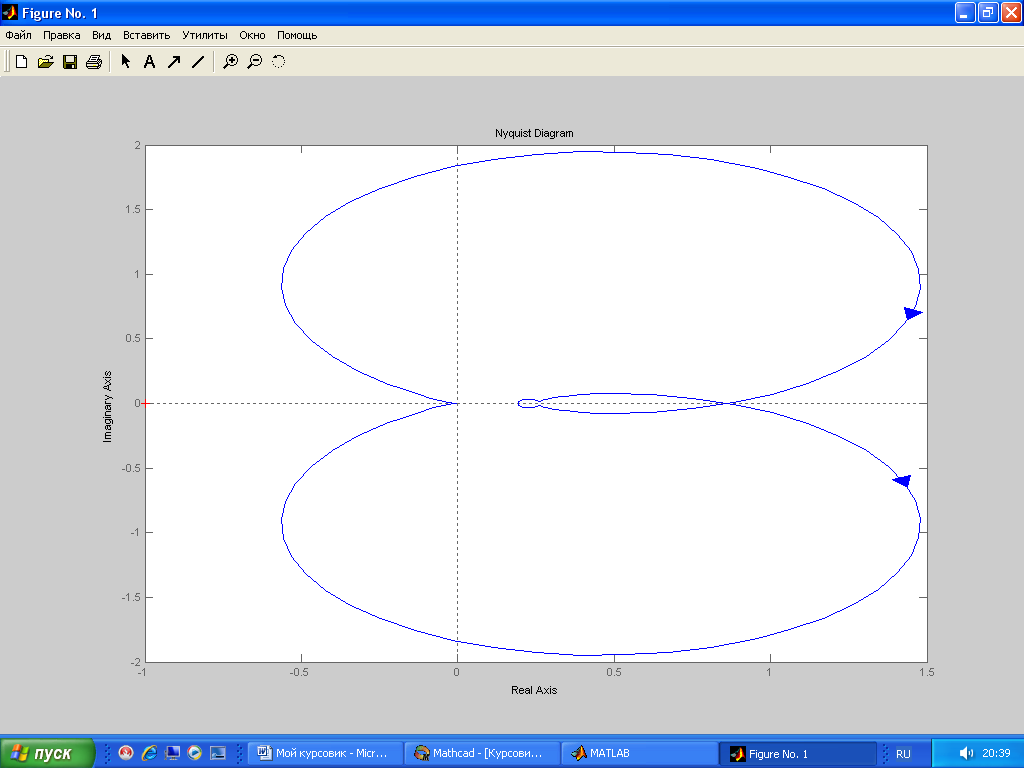
Рисунок 12 – Критерий Найквиста при проверке устойчивости подобранного корректирующего устройства системы
Из рисунка 12 видно, что ЛАЧХ корректирующего устройства не охватывает точку с координатами (-1;j0). Следовательно разработанная система автоматического регулирования устойчива.
В результате включения последовательного корректирующего устройства структурная схема системы управления капельным орошением почвы примет вид :
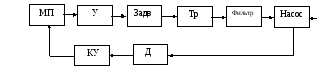
Рисунок 14 - Последовательное включение корректирующего устройства
Для того чтобы синтезировать программное корректирующее устройство запишем передаточную функцию последовательного корректирующего устройства в виде z – разностных уравнений, проведем обратное z – преобразование и вычислим коэффициент ошибки управления.
![]() . Произведем
замену
. Произведем
замену
![]() :
:
![]() . Произведем
замену
. Произведем
замену![]() :
:
 . Домножим
числитель и знаменатель на
. Домножим
числитель и знаменатель на
![]() ,
тогда:
,
тогда:
![]() Запишем разностное уравнение в
реальном масштабе времени:
Запишем разностное уравнение в
реальном масштабе времени:
![]()
Передаточная функция системы автоматического управления с последовательно включенным корректирующим устройством :

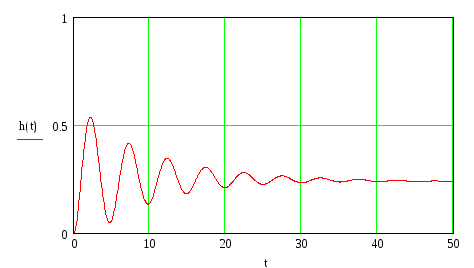
Рисунок 14 – График переходного процесса системы автоматического
регулирования с включенным корректирующим устройством
Определим показатели качества:
-
Время протекания переходного процесса: tр = 30 с.
-
Перерегулирование:
 .
.
3) Число колебаний системы от момента воздействия на нее до перехода в установившееся состояние: N=7.
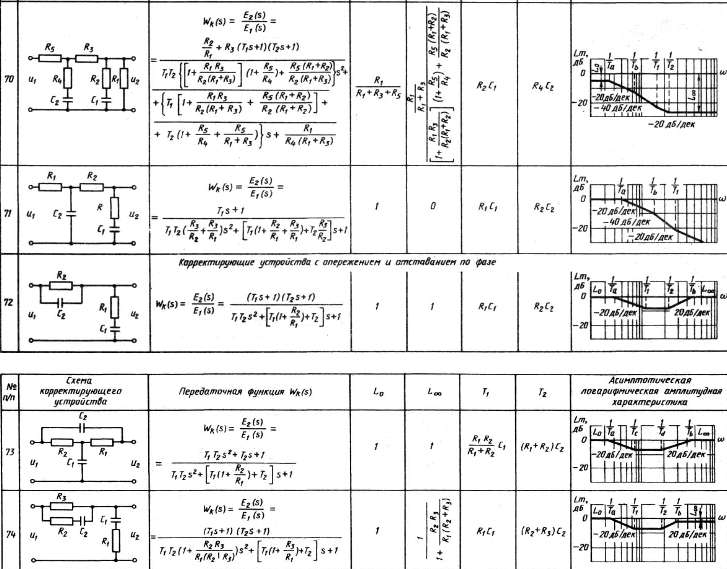
6.3 Выбор корректирующего устройства
Так как в САУ изначально присутствует микропроцессорное устройство, то применение аналогового корректирующего устройства экономически нецелесообразнее, так как добавляются новые элементы. Одним из достоинств программной коррекции является точное выполнение зависимостей корректирующего устройства, тогда как для аналоговых корректирующих устройств трудно добиться точности, так как трудно точно подобрать номинал элементов в соответствии с расчетным. Поэтому целесообразнее написать программу коррекции для МП.
6.4 Синтез программного корректирующего устройства
Для реализации выражения в виде программы МПС необходимо коэффициенты при входных и выходных сигналах записать в ПЗУ. При включении МПС происходит чтение выходного Y и входного Х сигналов за два и два такта машинного времени соответственно. Имея постоянные коэффициенты и, входные и выходные сигналы программа вычисляет выходную величину Y в k–ый такт машинного времени. После чего программа выдаёт корректирующий сигнал на выходной порт МПС. Далее программа считывает новые значения Yk-1 и Xk-1 и опять формирует корректирующий сигнал.
Программа для микропроцессора
Представим разностное уравнение в виде:
![]()
Для разностного уравнения корректирующего устройства составим блок-схему возможной процедуры коррекции (рисунок 15).







![]()







Рисунок 15 – Блок-схема программы коррекции
Ниже приведена процедура коррекции для микропроцессора, написанная на языке Assembler.
; Расчет разностного уравнения
;
![]()
; х – входной сигнал
; у – выходной сигнал
i_port EQU 11h ; номер порта для чтения
o_port EQU 12h ; номер порта для записи
А1 EQU 110000;
A2 EQU -170000;
A3 EQU 60000;
B1 EQU -119000;
B2 EQU 17000000;
B3 EQU -51000;
x1, x2, x3 DB 0
; выделение памяти под переменные xk-2, xk-1, xk
у1, у2, y3 DB 0
; выделение памяти под переменные yk-2, yk-1, yk
; вычисляем значение выражения
у(k)=A1*x1+A2*x2+ A3*x3+B1*y1+B2*y2+B3*y3
start: ; метка начала цикла коррекции
in al, i_port ; чтение данных из порта
mov al, Al ; вычисление слагаемого А1*х1
mul al, x1 ; слагаемое А1*х1
mov bl, al ; сохранение результата в bl
; в результате имеем А1*х1 в регистре bl
mov al, х2 ; вычисление
mul al,A2 ; слагаемое А2*х2
add bl, al ; прибавление к предыдущему результату
mov al, х3; вычисление
mul al,A3; слагаемое А3*x3
add bl, al ; прибавление к предыдущему результату
; в результате имеем А1*х1+А2*х2+A3*x3 в регистре b1
mov al, y1 ; вычисление
mul al, B1 ; слагаемое В1*у1
add b1, a1 ; прибавление к предыдущему результату
; в результате имеем А1*х1+А2*х2+A3*x3+B1*y1в регистре b1
mov al, y2 ; вычисление
mul al, B2 ; слагаемое В2*у2
add b1, a1 ; прибавление к предыдущему результату
mov al, y3; вычисление
mul al, B3; слагаемое В3*y3
add b1, a1 ; прибавление к предыдущему результату
; в регистре b1 имеем результат вычисления всего выражения
mov y1, b1
mov y2, y1
mov x1, x
mov x2, x1
out o_port, bl; вывод управляющего сигнала из bl
jmp start; зацикливание на начало программы
ЗАКЛЮЧЕНИЕ
В курсовом проекте предложен вариант реализации локальной системы
управления капельным орошением почвы. Для данной системы построены реальные и желаемые логарифмические характеристики. Первоначальная нескорректированная система не удовлетворяла требованиям к качеству управления. Произведена параллельная коррекция, которая помогает достичь желаемых характеристик. Осуществлен подбор аналогового корректирующего устройства, которое сравнивалось с программной коррекцией. Но так как в САУ изначально присутствует микропроцессорное устройство, то применение аналогового корректирующего устройства экономически нецелесообразнее. МП 8051АН позволяет осуществлять управление с коррекцией, позволяющей повысить качество управления.
Таким образом, можно сделать вывод, что спроектированная САУ капельным орошением почвы на базе микропроцессора 8051АН, отвечает требованиям ТЗ.