

1.6 Определение устойчивости системы по критерию Михайлова
Необходимо, чтобы годограф Михайлова прошел последовательно все квадранты.
Характеристическое уравнение имеет вид:


Получим характеристический вектор и выделим в нем вещественную и мнимую части:





Построим годограф Михайлова:
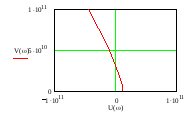
Рисунок 5 – Годограф Михайлова
Из графика видно, что система является неустойчивой, так как годограф Михайлова не проходит последовательно все квадранты, а уходит в бесконечность во втором квадранте.
1.7 Построение переходного процесса системы
Переходная функция - это реакция системы на ступенчатое входное воздействие.
Для того, чтобы построить переходный процесс используем обратное преобразование Лапласа:
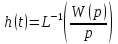


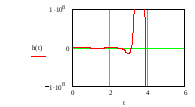

Рисунок 6 – Переходная функция системы
Анализируя график, можно судить о том, что полученная линейная система неустойчива. Прямые оценки качества системы определить невозможно.
1.8 Построение амплитудно-частотной характеристики системы
АЧХ строится для того, чтобы определить косвенные оценки качества системы.
Для
того, чтобы определить АЧХ системы,
необходимо в передаточной функции
 заменить р на
заменить р на
 ,
знаменатель
уравнения помножить на сопряженное
выражение, выделить мнимую и вещественную
части по формулам определить АЧХ.
,
знаменатель
уравнения помножить на сопряженное
выражение, выделить мнимую и вещественную
части по формулам определить АЧХ.

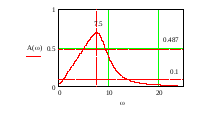

Рисунок 7 – Амплитудно-частотная характеристика системы
Определим косвенные оценки качества системы:
- амплитуда при нулевой частоте A(0)=0.145;
- максимальная амплитуда Аmax=0.69;
- резонансная частота - это частота, при которой амплитуда максимальна

- частота среза - это частота, при которой амплитуда равна 0.1

-
полоса пропускания – это диапазон
частот от
 до
до
 ,
который определяется при срезе величиной
,
который определяется при срезе величиной
 ,
,
 .
Следовательно
.
Следовательно
 ;
;
- период колебаний
- показатель колебательности
-величина перерегулирования

- время регулирования


1.9 Определение запаса устойчивости системы по логарифмической амплитудно- частотной характеристике и логарифмической фазо-частотной характеристике
По данной передаточной функции построим ЛАЧХ и ЛФЧХ

ЛАЧХ и ЛФЧХ изображены на рисунке 8.
По аппроксимированной ЛАЧХ определим передаточную функцию:

Запасы
устойчивости по амплитуде и частоте
определить невозможно, т.к. система
является неустойчивой. Это видно по
графикам: ЛАЧХ не пересекает нулевую
амплитуду, а ЛФЧХ не пересекает


, рад/с
дБ
+20 дБ/дек
-40 дБ/дек

, рад/с
дБ
Рисунок 8 – Логарифмическая амплитудно-частотная характеристика и логарифмическая фазо-частотная характеристика системы
2 Исследование нелинейной части системы
2.1 Техническое задание
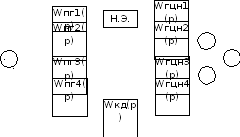
Рисунок 9 – Структурная схема нелинейной системы автоматического регулирования
Графическая характеристика нелинейного элемента приведена на рисунке10.

Рисунок 10 – Релейная статическая характеристика нелинейного элемента
2.2 Упрощение структурной схемы нелинейной системы автоматического регулирования
Применяя правила преобразования структурных схем, упростим схему, изображенную на рисунке9, преобразовав последовательно – параллельные соединения звеньев:
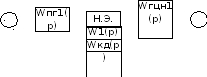
Рисунок 11 – Структурная схема нелинейной системы автоматического регулирования после преобразования последовательно-параллельных соединений звеньев
Определим передаточные функции представленные на рисунке 11:


Вынесем элементы Wпг1(p) и Wгцн1(p) за параллельную связь:

Рисунок 12 – Структурная схема нелинейной системы автоматического регулирования после преобразования
Определим передаточные функции представленные на рисунке 12:





Так
как звенья
 и
и
 оказывают на состояние системы
незначительное воздействие, то в
дальнейшем будем рассматривать систему
без них:
оказывают на состояние системы
незначительное воздействие, то в
дальнейшем будем рассматривать систему
без них:

Рисунок 13 – Итоговое преобразование системы автоматического регулирования с нелинейным элементом
-
Построение фазового портрета нелинейной системы автоматического регулирования
Об устойчивости системы будем судить по фазовому портрету. Построение фазового портрета будем вести методом припасовывания. Но, сначала рассмотрим данную нам нелинейную характеристику элемента с ограничениями.
Из рисунка 10 следует следующее:
По определению передаточной функции имеем:
Подставляя в эту формулу значение передаточной функции получим:

В
знаменателе данной передаточной функция
 выражения в пятой степени, то есть
характеристическое уравнение линейной
части нелинейной САР имеет пятую степень.
выражения в пятой степени, то есть
характеристическое уравнение линейной
части нелинейной САР имеет пятую степень.
Степени больше второй - степени для более низких частот, оказывают небольшое влияние на систему в целом, поэтому мы можем ими пренебречь.
Следовательно можем записать, что:

Приведенную формулу можно записать в виде:


Воспользуемся пакетом MathCad для решения этого дифференциального уравнения.
Введем
замену
 и исключим из правой части уравнения
производную:
и исключим из правой части уравнения
производную:

Перенесем
 влево:
влево:

Так
как в качестве нелинейного элемента
используется реле со статической
характеристикой, представленной на
рис.10, то подставляя значение
 для двух участков, получим систему:
для двух участков, получим систему:

Создадим матрицу для решения дифференциального уравнения в программе MathCad:
В данной матрице реализовано условие перехода от одного уравнения к другому. Зададим матрицы для трех начальных условий:



Возьмем количество точек равным 1000 и конечное время интегрирования 200, то матрица решений запишется как:


Построим фазовый портрет:
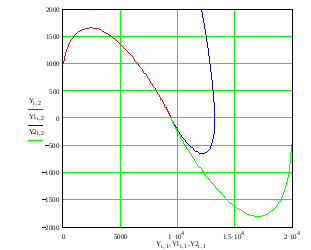
Рисунок 14 – Фазовый портрет нелинейной системы
Построим переходные процессы нелинейной системы.

, с
Рисунок 15 – Переходный процесс нелинейной системы
Вывод.
На рисунке 14 представлен фазовый портрет нелинейной системы. Из графика видно, что при различных начальных условиях система будет оставаться устойчивой. С течением времени процесса амплитуда колебаний будет уменьшаться, система придет к устойчивому равновесию – точке (9390.7;0) на рисунке 14, то есть произойдет процесс переключения. Устойчивость системы подтверждает график переходного процесса рисунок 15.
ЗАКЛЮЧЕНИЕ
В ходе данной курсовой работы, была рассмотрена система передачи тепловой энергии от теплоносителя первого контура, к питательной воде второго контура. Были получены функциональная и структурная схемы системы. Исследована линейная, и нелинейная части системы.
В ходе исследования линейной системы, была получена передаточная функция, по которой был построен переходный процесс, который свидетельствовал об не устойчивости линейной системы. Также система оказалась не устойчивой по критерию Гурвица и годографу Михайловаа. Определены прямые и косвенные оценки качества системы
Нелинейная система была получена путем введения нелинейного элемента с заданной статической характеристикой. В ходе исследования полученной системы был построен фазовый портрет – сходящаяся в точке кривая. Следовательно введение нелинейного элемента в систему оказало положительное влияние на устойчивость системы.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
-
Автоматизация и современные технологии / Под ред. Анисимова. М: 2005 №12.
-
Айзерман М.А. Теория автоматического регулирования. 2- е издание. – М.: Наука,1966. – 452 с.
-
Бесекерский В.А. Теория систем автоматического регулирования/ В.А. Бесекерский, Е.П. Попов. – М.: Профессия, 2003. – 380 с.
-
Климовицкий М.Д. Автоматический контроль и регулирование: Справочник. – Л.: Металлургия, 1987. – 345 с.
-
Кошарский Б.Д., Бек В.А. Автоматические приборы и регуляторы. – Ь.: Машиностроение, 1964. – 704 с.
-
Лапшинков Г.И., Полоцкий Л.М. Автоматизация производственных процессов в химической промышленности. Технический средства и лабораторные работы. – М.: Химия, 1988. – 288 с.
-
Летов А.М. Устойчивость нелинейных регулируемых систем. – М.: Физматгиз, 1962. – 315 с.
-
Обновленский П.Л., Гуревич А.Л. Основы автоматизации химических производств. – М.: Химия, 1975. – 328 с.
-
Поспелов Г.С. Импульсные системы автоматического регулирования. – М.: Машгиз, 1950. – 256 с.
-
Промышленные приборы и средства автоматизации: Справочник/ В.Я. Баранов. Л.: Машиностроение, 1987. – 847 с.
-
Пугачев В.С.Основы автоматического регулирования. – М.: Наука, 1974. –720 с.
-
Топчеев Ю.И. Атлас для проектирования систем автоматического управления. – М.: Машиностроение, 1982. – 312 с.
Лист
Листов
Лит.
2
20
БИТТУ УИТ-42
УИТС.421434.226 ПЗ
Изм
Лист
№ докум
Подп.
Дата
Разраб.
Пров.
Утв.
Н. контр.
Телегин
Скоробогатова
Власов В.В.
Бойко
Система передачи тепловой энергии от теплоносителя первого контура, к питательной воде второго контура
Пояснительная записка