

Определение значений параметров настройки идля и, п и
ПИ-регуляторов
а) И-регулятор (К1 = 0 и W(p)=K0/p)
Подставляя
К1
= 0 в
уравнение К1(![]() )получим
)получим
![]() .
.
![]()

Частота
затухания основной гармоники
![]() рад/с
рад/с
Период
колебания этой составляющей
![]() с
с
Время
затухания
![]() с
с
![]()
Частота
затухания основной гармоники
![]() рад/с
рад/с
Период
колебания этой составляющей
![]() с
с
Время
затухания
![]() с
с
б) П-регулятор (К0 = 0 и W(p) = К1)
Подставляя
К0
= 0 в
уравнение К0(![]() )получим
)получим
![]() .
.
![]()

Частота
затухания основной гармоники
![]() рад/с
рад/с
Период
колебания этой составляющей
![]() с
с
Время
затухания
![]() с
с
![]()
Частота
затухания основной гармоники
![]() рад/с
рад/с
Период
колебания этой составляющей
![]() с
с
Время
затухания
![]() с
с
В системе с П-регулятором имеется статическая ошибка, что не всегда допустимо. В качестве рабочей точки (оптимальные значения К0 и К1) чаще всего выбирается точка, соответствующая Копт или точка, лежащая несколько правее. При этом переходной процесс протекает с меньшей частотой, чем в случае П-регулятора, но при этом отсутствует статическая ошибка.
![]()
![]()

1.
![]()
![]()
Почленно разделим числитель на знаменатель, получим статическую ошибку
![]()
при
![]()
Статическая
ошибка
![]()
2.
![]()
![]()
Почленно разделим числитель на знаменатель, получим статическую ошибку
![]()
при
![]()
Статическая
ошибка
![]()
в)
ПИ-регулятор
(значение
![]() находится из условия
находится из условия![]() )
)
![]()
Частота
затухания основной гармоники
![]() рад/с
рад/с
Период
колебания этой составляющей
![]() с
с
Время
затухания
![]() с
с
![]()

Частота
затухания основной гармоники
![]() рад/с
рад/с
Период
колебания этой составляющей
![]() с
с
Время
затухания
![]() с
с
Определение переходных функций по задающему воздействию для и, п и
ПИ-регуляторов
И-регулятор
M1=0.3
![]()
![]()
![]()
![]()
![]() В
В
![]()

M2=0.36
![]()
![]()
![]()

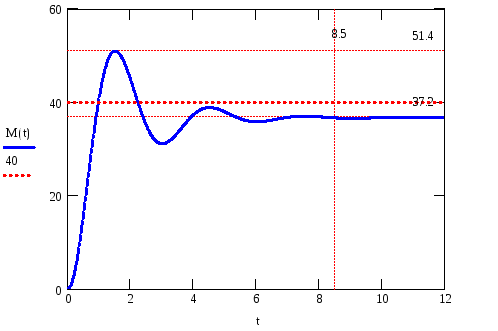
П-регулятор
M1=0.3
![]()
![]()
![]() В
В
![]()
M2=0.36
![]()
![]()
![]()

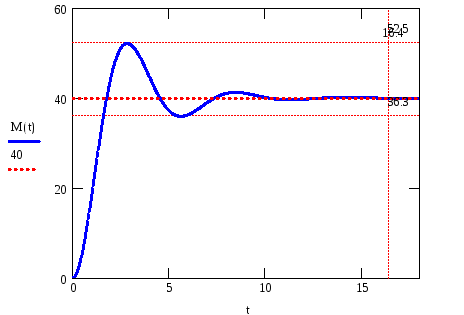
ПИ-регулятор
M1=0.3
![]()
![]()
![]() В
В

![]()
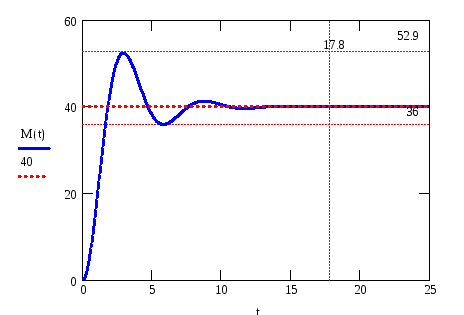
M2=0.36
![]()
![]()
![]() В
В
![]()
3.1 Переходной процесс левее точки пи-регулятора:
m=0.3 k1=2 , k0=1.004, =1.322
![]()
![]()
![]() В
В
![]()

m=0.36 k1=1.5, k0=0.718, =1.174
![]()
![]()
![]() В
В
![]()
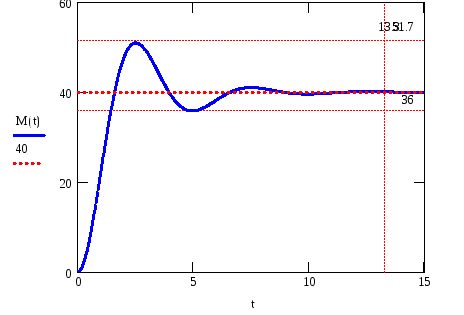
Переходной процесс правее точки ПИ-регулятора
m=0.3 k1=3, k0=0.971, =1.64
![]()

![]()
m=0.36 k1=2, k0=0.679, =1.378
![]()
![]()
![]() В
В
![]()
|
Регулятор |
Прямые показатели качества переходного процесса | ||||
|
Время ПП, tп.п. |
Перерегулирование, σ% |
Колебательность, К |
Степень затухания, ψ | ||
|
И |
m1 |
48.9 |
36.9 |
3.3 |
0.799 |
|
m2 |
49.8 |
32.8 |
2.8 |
0.805 | |
|
П |
m1 |
8.5 |
37.6 |
3.3 |
0.789 |
|
m2 |
9.2 |
29.3 |
2.8 |
0.816 | |
|
ПИ |
m1 |
14.3 |
39.3 |
3.3 |
0.782 |
|
m2 |
16.9 |
29.6 |
2.8 |
0.832 | |
|
Лев. |
m1 |
15.5 |
35.0 |
3.3 |
0.739 |
|
m2 |
17.8 |
31.0 |
2.8 |
0.822 | |
|
Пр. |
m1 |
13.1 |
41.1 |
3.3 |
0.781 |
|
m2 |
13.3 |
30.8 |
2.8 |
0.809 | |
Перерегулирование
![]() -
для И и ПИ-регуляторов
-
для И и ПИ-регуляторов
![]() -
для П-регулятора
-
для П-регулятора
Колебательность
![]() К
–число колебаний
за время п.п К=1/m
К
–число колебаний
за время п.п К=1/m