

1. Принципиальная схема автоматической системы регулирования с двумя усилителями
На рис. 1 изображена принципиальная схема исследуемой системы автоматического регулирования с двумя усилителями.

Рис. 1 Принципиальная схема автоматической системы регулирования
Данная система регулирования работает по следующему принципу, допустим, что частота вращения ротора турбины увеличилась. Тогда шары регулятора скорости 1 под действием центробежной силы пойдут вверх, муфта регулятора устремиться вверх. Через рычаг сигнал передастся на золотник 2, поршни которого пойдут вниз. В результате откроются нижние окна золотника 2, и масло устремит поршень усилителя 3 вверх. При этом откроются верхние окна золотника 4, и масло устремит поршень усилителя 5 вниз, тем самым, прикрывая клапан турбины 6. Через рычаги обратной связи система приходит в состояние равновесия.
2. Решение системы дифференциальных уравнений сар

Уравнения движения отдельных элементов системы автоматического регулирования:
Уравнение движения ротора:
![]() ,
,
![]() .
.
Уравнение движения поршня 1-го сервомотора:
![]() ,
,
![]() .
.
Уравнение движения 1-го золотника:
![]() ,
где коэффициент выключения
,
где коэффициент выключения
![]() таким образом
таким образом
![]() .
.
Уравнение движения поршня 2-го сервомотора:
![]() ,
,
![]() .
.
Уравнение движения 2-го золотника:
![]() ,
где коэффициент выключения
,
где коэффициент выключения
![]() таким образом
таким образом
![]()
Уравнение регулятора скорости:
![]() ,
,
![]() .
.
В результате имеем систему из 3-х дифференциальных уравнений:
![]()
 ,
,
![]() ,
,
![]() ;
;
Подставляя известные величины, получим:
![]()
 ,
,
![]() ,
,
![]() .
.
Составим
характеристическое уравнение для этой
системы через определитель:

Исследуем устойчивость системы по методу Рауса-Гурвица:
для устойчивой динамической системы все коэффициенты характеристического уравнения должны быть положительными;
для устойчивости динамической системы необходимо также, чтобы определители до порядка n-1 были положительными.
С0=0,02>0;
С1=0,21>0;C2=1>0;C3![]() 4,545>0.
4,545>0.
1-й определитель: С1=0,21>0;
2-й определитель:
С1С2-С0С3=0,211-0,024,545![]() 0,1191>0.
0,1191>0.
Итак, в данном случае динамическая система устойчива.
Определим характер переходного процесса по диаграмме Вышнеградского [2] (см. рис. 2). Для этого найдем координаты XиY, которые являются комплексами из известных постоянных коэффициентов характеристического уравнения:
![]()
![]()
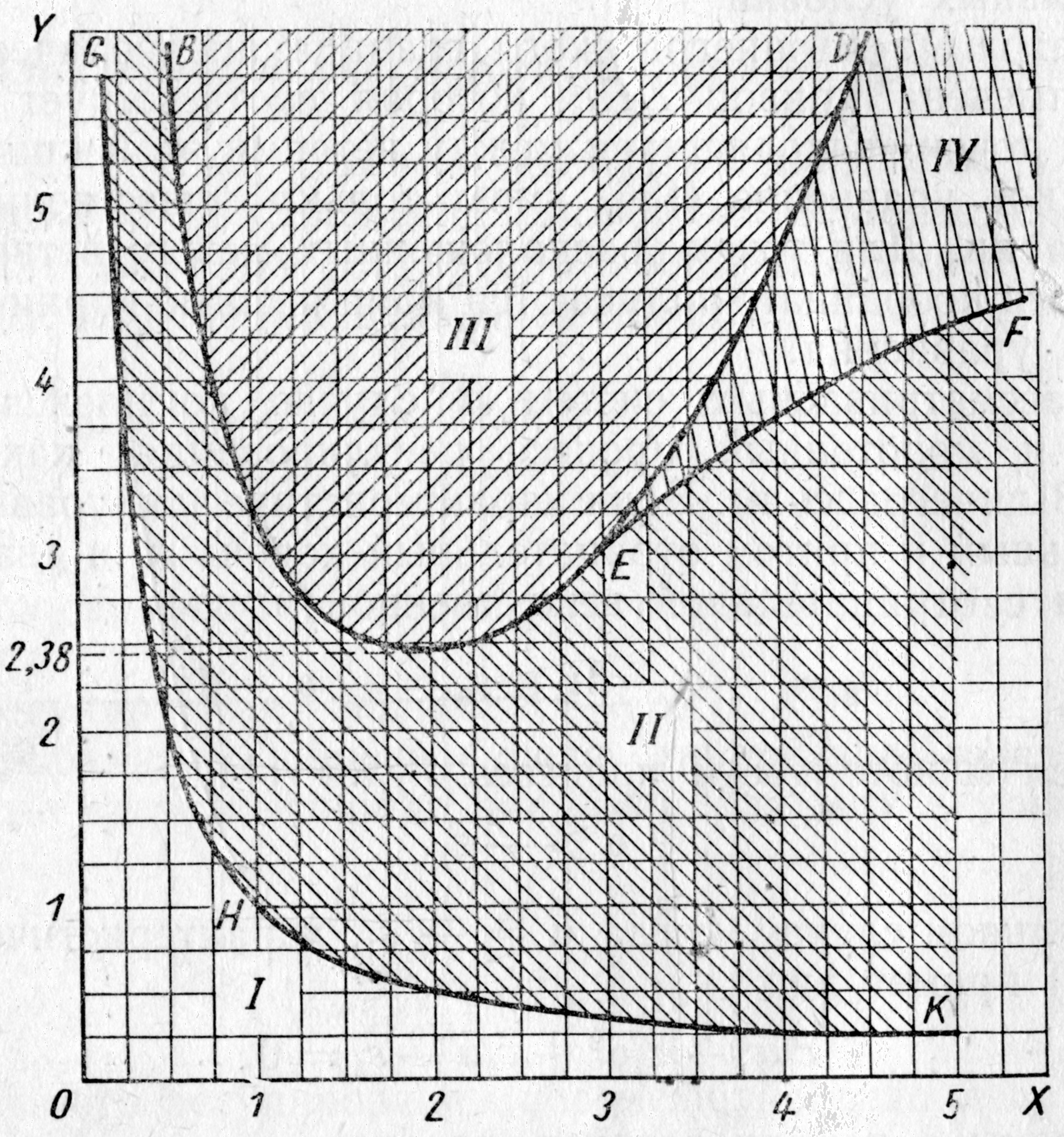
Рис.2 Диаграмма Вышнеградского:
I– областьнеустойчивого регулирования;II– область устойчивых колебательных процессов;III– область монотонных процессов;IV– область апериодических процессов.
В результате получаем, что данный процесс лежит в области II устойчивых колебательных процессов.
Определим динамический заброс и логарифмический декремент колебаний по диаграммам ЦКТИ [1] (рис. 3 и рис. 4). Диаграммы построены в зависимости от следующих комплексов:
![]()
![]()
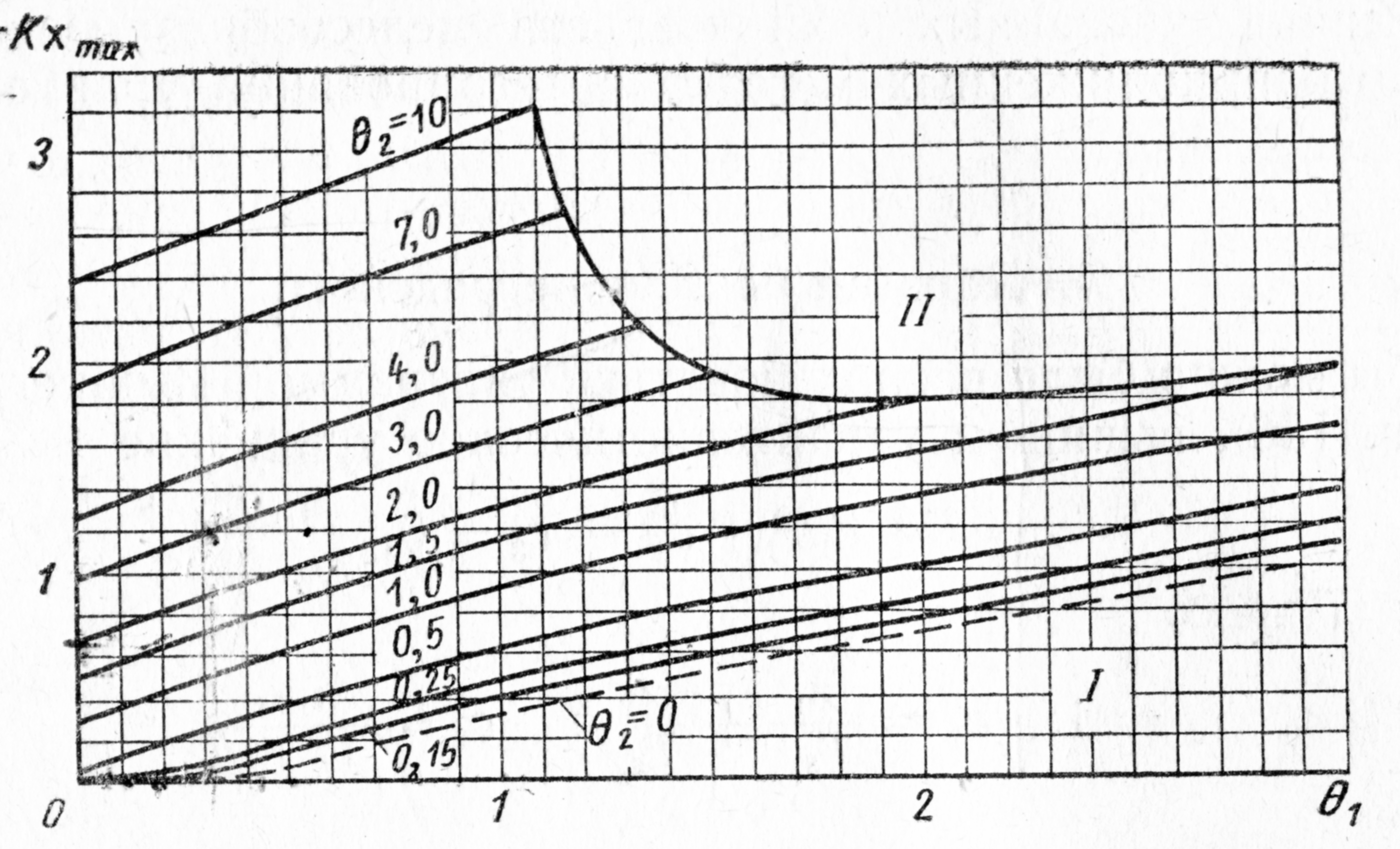
Рис. 3 Перерегулирование для системы с двумя усилителями:
I – область устойчивого регулирования; II – область неустойчивого регулирования.

Рис. 4 Логарифмический декремент колебаний для схемы с двумя усилителями.
Получаем, что:
динамический заброс (по диаграмме) φmax = - 0,3.
логарифмический декремент колебаний (по диаграмме) d = 3.
3. Анализ динамических качеств системы и рекомендации,
направленные на улучшение динамики исследуемой системы
регулирования
Чтобы уменьшить динамический заброс и увеличить логарифмический декремент колебаний необходимо уменьшать оба комплекса 1 и 2, данный вывод можно сделать, проанализировав графики изображенные на рис. 3 и рис. 4.
Рассмотрим пути уменьшения данных комплексов:
Уменьшить времена усилителей Тs1 и Тs2.
Для этого обратимся
к зависимости
![]() ,
здесь нужно искать возможность по
уменьшениюFиmmaxи по увеличению ширины и высоты окон
золотникаbиSсоответственно, а также давления
нагнетания маслаpн.
Но увеличениеbиSограничено увеличивающейся силой
реакции масла, вытекающего из золотника,
поэтому необходимо предусмотреть
мероприятия по уменьшению этой силы,
например, выполнить подрезку пояска
золотника. А увеличение давления
нагнетания масла ограниченно прочностью
трубопроводов.
,
здесь нужно искать возможность по
уменьшениюFиmmaxи по увеличению ширины и высоты окон
золотникаbиSсоответственно, а также давления
нагнетания маслаpн.
Но увеличениеbиSограничено увеличивающейся силой
реакции масла, вытекающего из золотника,
поэтому необходимо предусмотреть
мероприятия по уменьшению этой силы,
например, выполнить подрезку пояска
золотника. А увеличение давления
нагнетания масла ограниченно прочностью
трубопроводов.
Увеличить коэффициент неравномерности , но он обычно задан в зависимости от задач регулирования, характеризует наклон статической характеристики.
Увеличить время ротора Та, которое в свою очередь зависит от геометрических размеров ротора, которые обычно заданы.
4. Расчет на ЭВМ характеристик переходного процесса
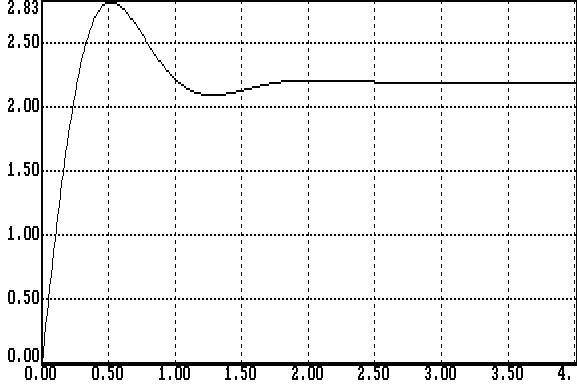
На ЭВМ произведен расчет системы дифференциальных уравнений, описывающих динамику данной системы регулирования. В качестве основного программного обеспечения используется программно-методический комплекс МИК-АЛ [3]. Результат расчета представлен в виде графика (рис. 5).
![]()
![]()
Рис.5 = f(t)
По графику, изображенному на рис. 5 найдём динамический заброс, используя формулу:
относительный динамический заброс = -’max/0, где
0=0,218 и ’max=0,065, откуда
относительный динамический заброс = - 0,065/0,218 = - 0,298.
По этому же графику найдем логарифмический декремент колебаний, который вычисляется по формуле:
d = ln(’max/”max), где
”max=0,003, тогда
d=ln(0,065/0,003)=3,08.
Время переходного процесса Т= 0,83 с. (см. рис. 5).
Полученные результаты вполне приемлемы (см. расчёт выше п. 2).