

Министерство образования и науки Украины _____________________________________________________ Контрольная работа №_____
по предмету: ________________
на тему: _______
студента __ курса,
группы_
заочного факультета
__________
___________
_________
Шифр:_______
Дата отсылки в вуз:____________
Рецензент____________________
Задание на контрольную работу
1. Составить функциональную схему
2. Составить структурную схему
3. Определить передаточные функции: разомкнутой системы по заданию, разомкнутой системы по возмущению, замкнутой системы относительно ошибки по заданию, замкнутой системы относительно ошибки по возмущению.
4. Построить логарифмические амплитудную и фазовую частотные характеристики.
Таблица 1- Варианты числовых значений исходных данных
|
№ п/п |
Ту, с |
Тм, с |
К1, В/град |
К2 |
К3, град/(В*с) |
К4, град/(Н*см*с) |
К5 |
|
1 |
0,010 |
0,20 |
1,00 |
100 |
0,15 |
0,30 |
0,001 |
1. Функциональная схема
Данная схема определяет функциональную связь всех элементов, разъясняет процессы, протекающие в отдельных частях и в ЭП в целом. Функциональные элементы изображаются на функциональной схеме в виде условных графических обозначений. Графическое построение схемы должно давать наиболее наглядное представление о системе.
Следящие системы – это системы, управляющие перемещением объекта регулирования. В таких системах главная обратная связь по положению.
Следящие системы бывают гидравлические, пневматические и электрические. В промышленных установках находят применение в станках с ЧПУ, роботах-манипуляторах.
Основной характеристикой следящей системы является точность, с которой они отрабатывают заданное перемещение, которое зависит от исполнения системы и режимов работы (режим позиционирования, режим отработки линейно изменяющегося сигнала и т.д.). Самый простой из режимов – режим позиционирования. Эти системы и находят наибольшее распространение.
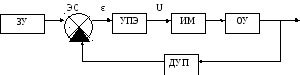
Рис. 1 – Функциональная схема
На рис. 1 введены следующие обозначения:
ЗУ – задающее устройство
ЭС – элемент сравнения
УПЭ – усилительно – преобразующий элемент
ИМ – исполнительный механизм
ОУ – объект управления
ДУП – датчик угловых перемещений
Таким образом, функционирование системы происходит по следующему принципу: Задающее устройство, являющееся частью измерительного моста принципиальной схемы, формирует задающие воздействие по угловому положению щеток, чтобы обеспечить цель управления – устранение рассогласования в системе. Усилительно – преобразующий элемент из рассогласования ε получает электрический сигнал в виде напряжения постоянного тока, величина которого прямо пропорциональна углу рассогласования. Вместе с исполнительным механизмом – двигателем и редуктором, - перемещают управляемый объект и щетку потенциометра для уменьшения рассогласования. Угловое положение фиксируется датчиком угловых перемещений и передается на элемент сравнения. На основании сравнения формируется новое управляющее воздействие и т.д., как и следует из принципиальных схем с обратной связью.