

2. Структурная схема
Системы автоматического регулирования положения (позиционные САР) строятся путем дополнения САР скорости системой автоматического регулирования положения. С этой целью используют замкнутую систему регулирования по отклонению, для построения которой необходимы датчик положения (или угла поворота вала) ДП, регулятор положения РП и командное устройство КУ, которое вырабатывает сигнал задания положения φ*. Регулятор положения формирует задание ω* для подчиненной ему САР скорости. На структурной схеме каждой математической операции по преобразованию сигнала соответствует определенное звено, причем элементарное звено соответствует математическому уравнению, которое не может быть заменено комбинацией других уравнений. Выпишем уравнение для каждого элемента:
1) элемент сравнения
ε=α-β, (2.1)
где α, β – соответственно угловые перемещения движков потенциометра, то есть командной и исполнительной осей принципиальной схемы,
ε – угловое рассогласование между задающей и исполнительной осями.
2) усилительно – преобразующий элемент
U=k1· ε, (2.2)
где U – напряжение постоянного тока системы, которое соответствует величине углового рассогласования,
k1 – коэффициент передачи рассогласования, В/град (К1 из табл. 1)
3) усилитель следящей системы – апериодическое звено первого порядка
U· k2=(T1p+1)Uу, (2.3)
где T1 – постоянная времени магнитного усилителя, с (Ту из табл. 1)
Uу – напряжение постоянного тока на выходе усилителя,
k2 – коэффициент усиления усилителя (К2 из табл. 1)
p – оператор дифференцирования
4) двигатель постоянного тока – исполнительный механизм
(Tmp+1)pα*=k3U-k4Mn, (2.4)
где Tm – постоянная времени магнитного усилителя, с (Тм из табл. 1)
α* - результирующий угол поворота выходного вала двигателя с учетом статического момента нагрузки, град (α*=αm-αn)
αm – угол поворота выходного вала двигателя без учета статического момента нагрузки, град
αn – угол поворота выходного вала двигателя из-за действия статического момента нагрузки, град
k3 – коэффициент передачи исполнительного механизма, град/Вс (К3 из табл. 1)
k4 – коэффициент наклона механической характеристики исполнительного механизма, град/(Н*см*с) (К4 из табл. 1)
Mn – момент сопротивления нагрузке, Н*м
5) редуктор
β=Кр – α, (2.5)
где β – угол поворота выходного вала редуктора, численно равный угловому перемещению движка потенциометра П1 исполнительной оси из-за действия механической обратной связи,
К5 – коэффициент передачи редуктора
К5 = ip-1 (К5 из табл. 1),
где i – передаточное число редуктора
6) уравнение добротности системы
k=k1+k2+k3, (2.6)
как отношение скорости слежения системы к установившейся в ней ошибке
Для перехода от уравнений к структурной схеме уравнения (2.2), (2.3), (2.5) оставляем без изменений, а уравнение (2.4) реализуем в виде двух последовательно соединенных звеньев – идеального интегрирующего звена и апериодического звена первого порядка. Уравнение (2.1) будет уравнением элемента замыкания.
Имеем структурную схему следующего вида (рис. 2):
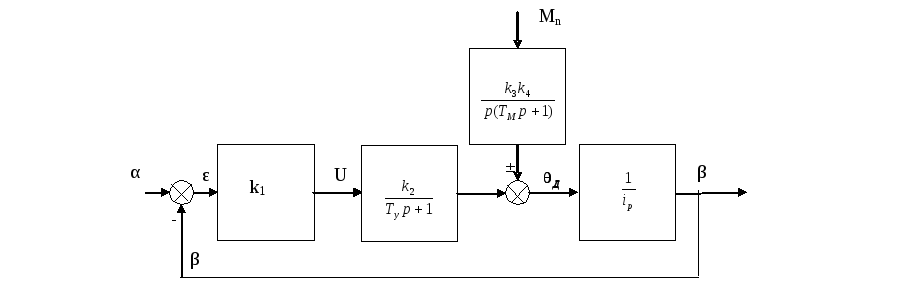
Рис. 2 – Структурная схема следящей системы