

3. Расчет времени установления процесса на выходе
![]() ;
;
 ;
;
![]() ;
;
![]() сек.
сек.
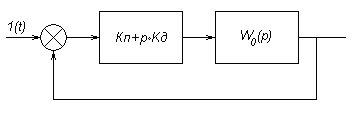
4. Проектирование пропорционального регулятора, обеспечивающего 3 % статической ошибки от установившегося значения

Передаточная функция разомкнутой системы, состоящей из объекта управления и П-регулятора, соединенных последовательно, в соответствии с [2]:
![]() ;
;
Передаточная функция замкнутой системы [3]:
![]() ;
;
Установившееся значение переходной функции замкнутой системы [3]:
![]() ;
;
Статическая ошибка замкнутой системы [3]:
![]() ;
;
Установившееся значение статической ошибки замкнутой системы [3]:
![]() .
.
Для обеспечения 3 % статической ошибки от установившегося значения, необходимо выполнение равенства:
![]() .
.
Построим переходную характеристику замкнутой системы.
![]() .
.
По формуле Хэвисайда:
![]()
 .
.
![]() ;
;![]() ;
;
![]() ;
;
![]()
![]() .
.

![]()
![]()
![]()




Рис.2. Переходная характеристика замкнутой системы
Рассчитаем время регулирования из условия вхождения в 3-х процентную трубку.
![]() ;
;
![]() ;
;
![]() сек.
сек.
5. Проектирование пропорционально-дифференциального регулятора, обеспечивающего время переходного процесса, по крайней мере, в 2 раза меньше, чем в предыдущем пункте
Передаточная функция ПД-регулятора:
![]() .
.
Передаточная функция разомкнутой системы:
![]() ;
;
Передаточная функция замкнутой системы:
![]() .
.
Найдем
![]() по формуле Хэвисайда:
по формуле Хэвисайда:
![]()
![]() ;
;![]() ;
;
![]() ;
;
![]()

 .
.
Коэффициент
![]() выбирается из условия
выбирается из условия![]() .
Примем
.
Примем![]() сек.
сек.
Из условия вхождения в 3-х процентную
трубку:
![]() .
.
![]() .
.

С помощью пакета MathCADрешили данное уравнение, получили ответ![]() .
.
Итак, передаточная функция ПД-регулятора,
необходимого для обеспечения времени
переходного процесса, равного 0,358 сек:
![]() .
.
Переходная характеристика замкнутой системы, состоящей из объекта управления и ПД-регулятора:
![]()
![]() ;
;
Ширина 3-х процентной трубки:
![]()
Ширина 3% трубки

![]()
![]()
Рис.3. Переходная характеристика замкнутой системы с ПД-регулятором
6. Изменение найденного значения коэффициента при дифференциальной составляющей на 10% и оценка влияния этого коэффициента на время регулирования
1)![]() ;
;
![]()
 =
=![]() .
.
Время регулирования из условия вхождения в 3-х процентную трубку:
![]() ;
;
![]() сек.
сек.
2)![]() ;
;
![]()
 =
=![]()
Время регулирования:
![]()
![]() сек.
сек.
![]()
![]()

![]()
![]()
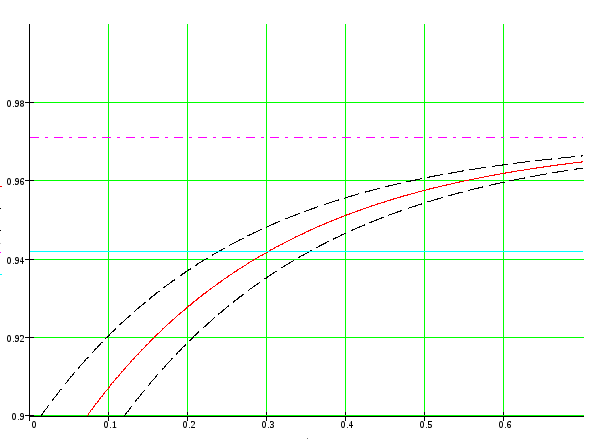
Рис.4. Переходная характеристика замкнутой системы с ПД-регулятором при различных значениях коэффициента при дифференциальной составляющей
Из графика видно, что изменение
коэффициента при дифференциальной
составляющей существенным образом
повлияло на время регулирования. В
частности, в нашем случае, при уменьшении
коэффициента
![]() всего на 10 %, время регулирования
увеличилось. А при увеличении его на 10
% время регулирования уменьшилось.
всего на 10 %, время регулирования
увеличилось. А при увеличении его на 10
% время регулирования уменьшилось.
7. Проектирование пид-регулятора таким образом, чтобы корни характеристического уравнения замкнутой системы были бы действительными

Передаточная функция регулятора:
![]() .
.
Передаточная функция разомкнутой системы:
 .
.
Передаточная функция замкнутой системы имеет вид:
 ;
;
Характеристическое уравнение передаточной функции замкнутой системы:
![]() =
0;
=
0;
Для того чтобы корни характеристического
уравнения были действительными: D![]() 0.
0.
Кроме того, для того, чтобы система была
устойчивой, корни характеристического
уравнения должны находиться в левой
полуплоскости (должны быть отрицательными):
![]() .
.
![]() ;
;![]() .
.
![]()
![]()
![]() ,
что и так уже предусмотрено
,
что и так уже предусмотрено![]() .
.
Примем
![]() =
5. Тогда характеристическое уравнение
примет вид:
=
5. Тогда характеристическое уравнение
примет вид:
![]() =
0.
=
0.
![]() ;
;
![]() ;
;
Таким образом, получили ПИД-регулятор
с передаточной функцией
![]() .
.