

Лекция № 18.
АНАЛИЗ ДИСКРЕТНЫХ ЛИНЕЙНЫХ СИТЕМ МПС.
План лекции:
-
Вычисление z- ПФ многомерных систем.
-
Пример вычисления z- ПФ силовой системы привода.
-
Исследование устойчивости дискретных систем.
-
Вычисление переходных процессов в импульсных системах.
18.1. Вычисление z- пф многомерных систем.
Рассмотрим уравнение состояния линейной многомерной дискретной системы:
x[k+1]=Фx[k]+Hu[k] (18.1)
y[k]=сx[k]+Ru[k] (18.2)
Здесь x=(x1,...xn)- n-мерный вектор переменных состояния;
u=(u1,...um)- m- мерный - вектор входных воздействий;
y=(y1,...yr)- r-мерный вектор выходных переменных.
Использование математического описания в форме (18.1), (18.2) дает ряд преимуществ при исследовании дискретных систем с вычислительной точки зрения. В частности оно позволяет легко формализовать решения задач анализа и синтеза ИС.
Например, математическое описание (18.1), (18.2) может быть использовано для матричной z- передаточной функцией, устанавливающей связь между входными и выходными переменными. Найдем эту z- передаточную функцию.
Введем z- преобразование координат:
x(z)=Z{x[k]}, y(z)= Z{y[k]}, u(z)= Z{u[k]}.
Применяя z- преобразование к обеим частям уравнений (18.1), (18.2) получим:
 ,
,
откуда:
(zE-Ф)x
![]() =H
u
=H
u![]() +zx(0);
+zx(0);
x
![]() =(zE-Ф)-1
Hu
=(zE-Ф)-1
Hu
![]() +(zE-Ф)-1
zx(0);
+(zE-Ф)-1
zx(0);
y
![]() =c(zE-Ф)-1
Hu
=c(zE-Ф)-1
Hu
![]() +c(zE-Ф)-1
zx(0)+Ru(z)
=
+c(zE-Ф)-1
zx(0)+Ru(z)
=
=[
c(zE-Ф)-1
H+R]
u
![]() +
c(zE-Ф)-1
zx(0)
(18.3)
+
c(zE-Ф)-1
zx(0)
(18.3)
Положив
в (5.29)
![]() ,
получим зависимость:
,
получим зависимость:
y
![]() =[
c(zE-Ф)-1
H+R]
u
=[
c(zE-Ф)-1
H+R]
u
![]() ,
,
устанавливающую связь между операторными изображениями входа и выхода. Матрица z- передаточных функций, связывающая входные переменные u1, u2,... um с выходными переменными y1, y2,... yr, определится соотношением:
![]() .
.
Для системы с m- выходами и r- входами матричная ПФ имеет размерность rх m, причем Wij(z) представляет собой z- ПФ от j- того входа к i- тому выходу.
Рассмотрим вычисление матричной ПФ. Основная трудность заключается в определении обратной матрицы (zE-Ф)-1. Аналитическое выражение для ее вычисления имеет вид:
![]() ,
,
где
![]() -
присоединенная (взаимная) матрица
(напомним, что это транспонированная
матрица алгебраических дополнений
элементов исходной матрицы).
-
присоединенная (взаимная) матрица
(напомним, что это транспонированная
матрица алгебраических дополнений
элементов исходной матрицы).
Из приведенной зависимости, в частности, видно, что det(zE-Ф) - входит в матрицу передаточных функций. Этот детерминант определяет характеристическое уравнение системы:
Det (zE-Ф)=0.
Корни этого уравнения являются собственными числами матрицы Ф.
Таким образом, матричная z- ПФ содержит в качестве своих полюсов собственные числа матрицы Ф.
Алгоритмы
получения ПФ, основанные на использовании
уравнений состояния, удобнее алгоритмов,
построенных на формулах
![]() -
преобразования. Использование ЭВМ в
задачах исследования дискретных систем
позволяет применить стандартные
программы обращения матриц, что приводит
к существенному снижению трудоемкости
выполняемых вычислений.
-
преобразования. Использование ЭВМ в
задачах исследования дискретных систем
позволяет применить стандартные
программы обращения матриц, что приводит
к существенному снижению трудоемкости
выполняемых вычислений.
Пример вычисления z-ПФ силовой системы привода:

Введем обозначения:

где
![]() -
угол поворота вала двигателя;
-
угол поворота вала двигателя;
![]() -
скорость;
-
скорость;
-
управляющее напряжение;
k и T1 - параметры ОУ.
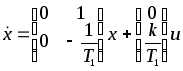
Выберем
вектор состояния
![]() .
Тогда
.
Тогда
 .
.
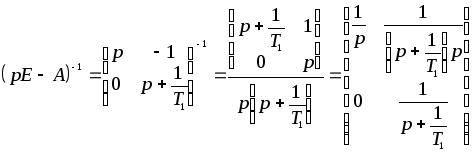
Применим для вычисления переходной матрицы Ф - аналитический способ, основанный на использовании преобразования Лапласа.
![]() ,
,
при
этом
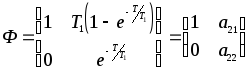
Найдем обратное преобразование:
 (18.4)
(18.4)
Подставляя в (18.4) t=T (интервал квантования), получим переходную матрицу состояния дискретной системы:
Перейдем к нахождению z- ПФ. Пусть y[k]=x[k], то есть e=E, R=0.
Тогда выражение для матричной ПФ примет вид:
 .
.
Для определения элементов матрицы H найдем решение дифференциальных уравнений объекта при нулевых начальных условиях и u=1:
![]()
Подставив в полученные зависимости t=T, найдем матрицу H:
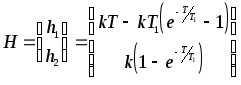 .
.
Матрица
ПФ
![]() в данном случае характеризует связь
напряжения u
с координатами
в данном случае характеризует связь
напряжения u
с координатами
![]() .
Вычислим матрицу:
.
Вычислим матрицу:
 .
.
окончательно получим:
 .
.