

лекции / lekcii_kompyuternoe_upravlenie / КУ_Л_19
.DOCЛЕКЦИЯ №19
ОПИСАНИЕ ИМПУЛЬСНЫХ СИСТЕМ С НЕСКОЛЬКИМИ
ИМПУЛЬСНЫМИ ЭЛЕМЕНТАМИ С ПОМОЩЬЮ
ПРОСТРАНСТВА СОСТОЯНИЯ.
План лекции:
-
Постановка задачи.
-
Определение подинтервалов постоянства управляющих воздействий.
-
Описание системы с несколькими импульсными элементами.
-
Пример анализа системы с несколькими импульсными элементами.
ИС может иметь в своем составе несколько ИЭ. Наиболее простым является случай, когда у всех ИЭ одинаковые периоды квантования, и все они срабатывают одновременно. Такие системы называются синхронными и синфазными (они рассмотрены ранее). В противном случае говорят об асинхронных (различные периоды квантования) и асинфазных (неодинаковое время срабатывания ИЭ) системах. Математическое описание и анализ таких систем представляет собой сложную задачу, для решения которой можно успешно использовать метод пространства состояния.
Ограничимся рассмотрением асинхронных систем с кратными периодами дискретности импульсных элементов.
Такие системы имеют в своем составе непрерывную часть, описываемую линейными дифференциальными уравнениями, и дискретную часть, состоящую из ИИЭ и формирующих звеньев.
Изложим общий подход к математическому описанию данных САУ.
При исследовании систем данного типа в качестве переменных рекомендуется выбирать:
-
координаты на выходе интеграторов;
-
координаты на выходе формирующих элементов.
Итак, пусть мы имеем многоканальную ИС, в которой каждый канал срабатывает со своей частотой и эти частоты кратные.
Рассмотрим интервалы квантования и найдем их наименьшее кратное Т. Очевидно, что цикл работы всей дискретной части системы составляет именно эту величину Т. Разделим цикл на r подинтервалов в соответствии с частотами и фазами работы отдельных ИЭ (рис.19.1).

Рис.19.1.
При этом мы будем считать, что в момент kT0+t1 срабатывает первый канал, в момент kT0+t2 - второй канал и так далее.
В каждом подинтервале (kT0+ti, kT0+ti+1) в системе имеют место два типа преобразования вектора состояния:
-
Изменение вектора состояния в интервалах между моментами квантования. Эти переходы характеризуются уравнениями вида:
![]()
где x- вектор состояния, а u- вектор управления. Данному уравнению соответствует решение:
x(t1)- =Фх(t0)++Hu(t0), (19.1)
где
![]()
![]()
Изменение переменных состояния при этом типе переходов иллюстрируются рис. 19.2.
Р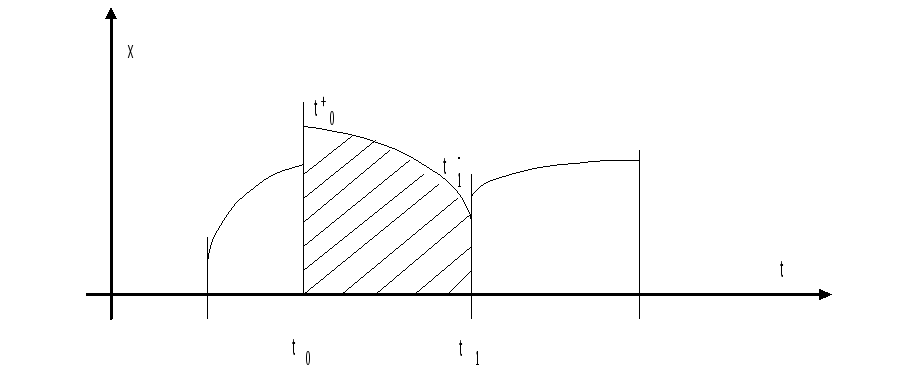 ис.19.2.
ис.19.2.
-
Изменение вектора состояния в моменты квантования. Эти
изменения описываются уравнениями вида:
х[t+1]=Fx[t-1]+Gu[t+1] (19.2)
индексы «-» и «+» соответствуют левым и правым пределам при стремлении аргумента t к t1.
Осуществляя последовательно переходы (19.1) и (19.2), можно установить связь между координатами в интересующие нас моменты времени.
Например, рассмотрим подинтервал [kT, kT +t1]. При t=kT имеем переход:
х[kT+]=Fx[T-]+Gu[kT+].
На интервале (kT,kT+t1) имеем переход:
х[(kT+t1)-]= Фх[kT+] +Hu[kT+].
Далее подставив х[kT+] в последнее уравнение, получим уравнение, связывающее значение вектора состояния в моменты t=kT- и (kT+t1)-
х[(kT+t1)-]= ФFх[kT-] +(ФG+H)u[kT+],
или
х[(kT+t1)-]= Qх[kT-] +Ru[kT+],
где Q=ФF; R=ФG+H.
Аналогично рассматриваются и стыкуются между собой последующие интервалы.
Более подробно описание подобных схем рассмотрим на конкретном примере.
Пример.
Допустим, задана ИСУ, структурная схема которой имеет вид (рис.19.3).
Рис.19.3.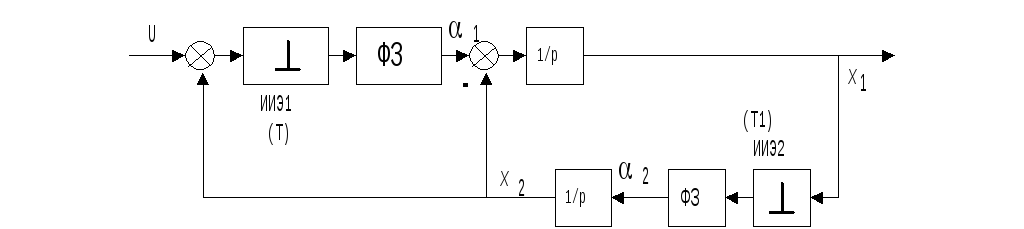
Данная система является асинхронной. Периоды повторения первого ИЭ- Т, и второго Т1 - кратные числа, причем Т=2Т1. Формирующие звенья обоих ИЭ представляют собой экстраполяторы нулевого порядка. Временная диаграмма работы импульсных элементов представлена на рис.19.4.
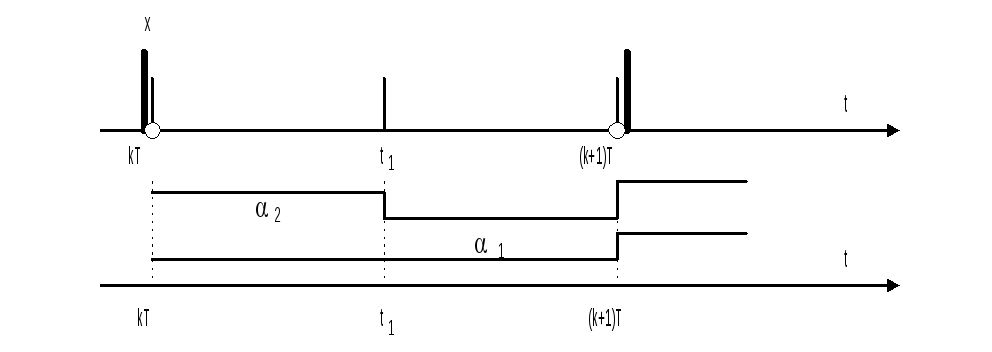
Рис.19.4.
Примем
за переменные состояния координаты х1,
х2.
Входное воздействие u(t)
будем считать непрерывной функцией.
Рассмотрим временной интервал (kT,t1)
и запишем дифференциальные уравнения,
соответствующие переходу kT+
![]() :
:
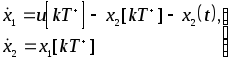
Решив заданную систему, получим при kT<t<t1:
x2(t)= x2[kT+]+x1[kT+](t-kT);

Подставив
в полученные зависимости
![]() получим:
получим:
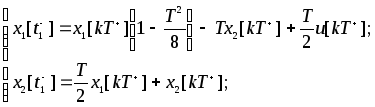
Эту систему можно представить в виде:
x[t1-]=Ф0x[kT+]+H0u[kT],
где
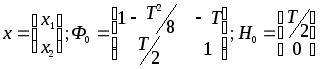 .
.
Рассмотрим
далее дискретный переход
![]() :
:
x1[kT+]= x1[kT-];
x2[kT+]= x2[kT-];
то есть x[kT+]=F0 x[kT-],
где
![]() .
.
Объединив результаты двух рассмотренных переходов, получим:
x[t1-]=Ф0F0x[kT-]+H0u[kT+]
или x[t1-]=Ф0x[kT-]+H0u[kT+],
так
как для данного случая
![]() .
.
Рассмотрим
следующий временной интервал![]() (t1,(k+1)T).
(t1,(k+1)T).
Запишем
дифференциальные уравнения, соответствующие
переходу
![]() При этом следует иметь в виду, что в
момент времени t1
срабатывает только второй ИИЭ, а выходной
сигнал первого ИИЭ не изменяется.
Уравнения имеют вид:
При этом следует иметь в виду, что в
момент времени t1
срабатывает только второй ИИЭ, а выходной
сигнал первого ИИЭ не изменяется.
Уравнения имеют вид:
![]()
Решив заданную систему, получим при t1<t<(k+1)T:

При t=(k+1)T имеем t-t1=T/2 и тогда:
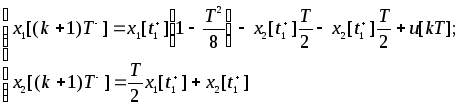
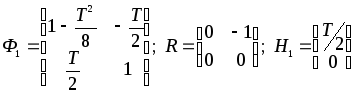
или, переходя к матричной форме записи:
x[(k+1)T-]=Ф1x[t1+]+Rx[kT+]+H1u[kT],
где
Дискретный
переход
![]() аналогичен рассмотренному переходу
аналогичен рассмотренному переходу
![]() ,
то есть:
,
то есть:
x[t1+]= x[t1-].
Объединив все переходы, получим:
x[(k+1)T-]=Ф1x1[t1-]+Rx[kT-]+H1u[kT]
x[(k+1)T-]=Ф1{Ф0x[kT-]+H0u[kT]}+ Rx[kT-]+H1u[kT]=
=[ Ф1 Ф0+R] x[kT-]+[ Ф1 H0+H1]u[kT-]
или
x[(k+1)T-]=Фx[kT-]+Hu[kT],
где
Ф=Ф1Ф0+R; H=H1+Ф1H0.
Таким образом, получена система разностных уравнений, определяющая связь между значениями переменных состояния на интервале основного квантования Т. Устойчивость рассматриваемой дискретной системы определяется собственными числами матрицы Ф. Полученные зависимости позволяют провести расчет переходных процессов в данной системе.