

лекции / lekcii_kompyuternoe_upravlenie / КУ_Л_23
.DOCЛЕКЦИЯ № 23
ИМПУЛЬСНАЯ КОРРЕКЦИЯ ДИСКРЕТНЫХ АВТОМАТИЧЕСКИХ СИСТЕМ
План лекции:
-
Общие сведения об импульсной коррекции дискретных систем.
-
Определение передаточной функции корректирующего устройства.
23.1 Общие сведения об импульсной коррекции дискретных систем.
В предыдущей лекции отмечалось, что реализация желаемых ЧХ дискретной системы с помощью непрерывного фильтра имеет ряд существенных недостатков
От этих недостатков свободен способ импульсной коррекции, к рассмотрению которого мы переходим
При реализации импульсного способа коррекции в систему вводится дискретный фильтр, преобразующий последовательность дискретных входных величин в выходную последовательность импульсов, то есть функциональная схема этого устройства имеет вид, приведенный на рис.23.1.
![]()
![]()
![]()




![]()
![]()
Рис.23.1.
Структурную схему импульсной системы с последовательно – включенным дискретным КУ можно представить в виде (рис.23.2):
![]()
![]()
![]()
![]()
![]()
![]()





Рис.23.2.
Здесь
![]() - передаточная функция приведенной
непрерывной части ДКУ;
- передаточная функция приведенной
непрерывной части ДКУ;
![]() -
передаточная функция приведенной
непрерывной части объекта управления
-
передаточная функция приведенной
непрерывной части объекта управления
Таким
образом, из предыдущей схемы следует,
что
![]() -
передаточная функция разомкнутой
скорректированной системы определяется
выражением:
-
передаточная функция разомкнутой
скорректированной системы определяется
выражением:
![]() ,
,
где
![]() - передаточные функции ДКУ и объекта
управления соответственно, те
- передаточные функции ДКУ и объекта
управления соответственно, те
![]()
 ;
;
23.2 Определение передаточной функции КУ.
Определение
ПФ ДКУ осуществляется по желаемой
![]() -
ПФ разомкнутой системы с учетом места
установки ДКУ в контуре управления
-
ПФ разомкнутой системы с учетом места
установки ДКУ в контуре управления
Так, структурная схема ИС с последовательной коррекцией представлена на рис.23.3.

![]()
![]()
![]()
![]()
![]()
![]()










Рис.23.3.
Здесь
![]() - ПФ приведенной НЧ дискретного фильтра,
- ПФ приведенной НЧ дискретного фильтра,
![]() - ПФ приведенной НЧ исходной системы.
Тогда для определения Z
– ПФ ДКУ легко получить зависимость
- ПФ приведенной НЧ исходной системы.
Тогда для определения Z
– ПФ ДКУ легко получить зависимость
![]() .
(23.1)
.
(23.1)
В
выражении (23.1)
![]() - желаемая ПФ системы, соответствующая
желаемым ЛАФЧХ
- желаемая ПФ системы, соответствующая
желаемым ЛАФЧХ
![]() ,
,
![]() Z
– ПФ исходной системы (располагаемая
Z
– ПФ)
Соотношение (23.1) может быть сразу записано
и для ЧХ в виде:
Z
– ПФ исходной системы (располагаемая
Z
– ПФ)
Соотношение (23.1) может быть сразу записано
и для ЧХ в виде:
![]()
Включение ДКУ при параллельной коррекции показано на рис.23.4.
Р ис.23.4.
ис.23.4.
Структурные преобразования показаны на рис.23.5.
Р ис.23.5.
ис.23.5.
Здесь ПФ приведенной
НЧ исходной системы определяется ПФ
произведением
![]()
Тогда определяя ПФ разомкнутой системы
и приравнивая ее к желаемой Z
– ПФ
Тогда определяя ПФ разомкнутой системы
и приравнивая ее к желаемой Z
– ПФ
![]() ,
получим:
,
получим:
![]()
где
![]() ;
;
![]()
Тогда ПФ дискретного фильтра определится зависимостью:
![]() (23.2)
(23.2)
Возможны и другие варианты включения ДКУ в контур управления Они рассмотрены в ряде учебников
При определении
![]() - ПФ дискретных фильтров следует
обязательно проверять условия их
физической реализуемости, то есть
степень числителя
- ПФ дискретных фильтров следует
обязательно проверять условия их
физической реализуемости, то есть
степень числителя
![]() не должна превосходить степень
знаменателя
не должна превосходить степень
знаменателя
При импульсной коррекции особенно удобно использовать метод ЛАПЧХ При этом частотные характеристики КУ определяются графически точно также, как и при синтезе непрерывных КУ

тк
![]() ,
поделим числитель и знаменатель на
,
поделим числитель и знаменатель на
![]() ,
получим
,
получим

![]()
![]()
![]()
Отсюда хорошо видна сущность условия физической реализуемости
И так, повторим шаги, которые необходимо выполнить при синтезе дискретных систем.
-
Находим ПФ располагаемой приведенной непрерывной части без коррекции:
![]() .
.
2. Используя билинейное преобразование, переходим к новой переменной:
![]() ,
,
то
есть определяем
![]() .
.
3.
Переходим к псевдочастоте в результате
замены
![]() .
.
4. Строим располагаемые ЛАФПЧХ:
![]()
-
Исходя из требуемой точности определяем запретную область (рис.22.2).
-
Определяем псевдочастотную передаточную функцию корректирующего звена.
-
Переходим к эквивалентному конечно-разностному уравнению, реализующему синтезированный корректирующий фильтр.
23.3 Некоторые вопросы реализации импульсных фильтров.
При
синтезе ИС мы можем определить
![]() - ПФ дискретного фильтра
Она определяется, например, из формул
(23.1) и (23.2) или после нахождения ЛАФЧХ
фильтра
- ПФ дискретного фильтра
Она определяется, например, из формул
(23.1) и (23.2) или после нахождения ЛАФЧХ
фильтра
![]()
Пусть передаточная функция
Пусть передаточная функция
![]() является дробно-рациональной функцией,
те
является дробно-рациональной функцией,
те
 (23.3)
(23.3)
где
![]()
По ПФ (23.3) легко составить разностное
уравнение фильтра:
По ПФ (23.3) легко составить разностное
уравнение фильтра:
![]() ,
,
 (23.4)
(23.4)
где
![]() и
и
![]() - соответственно входная и выходная
переменные дискретного фильтра
- соответственно входная и выходная
переменные дискретного фильтра
Реализацию ИФ можно осуществить двумя основными способами
Первый
способ состоит в том, что подбирается
приведенная непрерывная часть фильтра,
обеспечивающая получение необходимой
![]() -
ПФ. При втором способе выполняется
непосредственное решение разностного
уравнения (7.8) с помощью ЦВМ
-
ПФ. При втором способе выполняется
непосредственное решение разностного
уравнения (7.8) с помощью ЦВМ
Рассмотрим первый способ
При
определении ПФ приведенной непрерывной
части по известной
![]() -
ПФ можно воспользоваться обратным
-
ПФ можно воспользоваться обратным
![]() - преобразованием , те:
- преобразованием , те:
![]()
Недостаток этого
подхода заключается в том, что определяемая
таким способом ПФ
![]() может оказаться слишком сложной
Поэтому имеются специальные способы
реализации ИФ с помощью непрерывных
элементов
В частности, отметим один из способов,
заключающийся в построении системы,
состоящей из элементов задержки и
суммирующих усилителей
При этом из указанных элементов
составляется схема моделирования,
аналогичная тому, как это делалось ранее
при выборе переменных состояния системы
При составлении схемы могут применяться
способы прямого, параллельного и
последовательного программирования
может оказаться слишком сложной
Поэтому имеются специальные способы
реализации ИФ с помощью непрерывных
элементов
В частности, отметим один из способов,
заключающийся в построении системы,
состоящей из элементов задержки и
суммирующих усилителей
При этом из указанных элементов
составляется схема моделирования,
аналогичная тому, как это делалось ранее
при выборе переменных состояния системы
При составлении схемы могут применяться
способы прямого, параллельного и
последовательного программирования
Вторым часто
используемым способом реализации
импульсного фильтра является решение
разностного уравнения (23.4) с помощью
ЦВУ (цифрового фильтра)
В этом случае непрерывный сигнал
![]() подвергается аналого–цифровому
преобразованию (АЦП), те
переводится в цифровой код, а решение
подвергается аналого–цифровому
преобразованию (АЦП), те
переводится в цифровой код, а решение
![]() ,
получаемое в ЦВУ в реальном масштабе
времени вводится в непрерывную часть
системы через ЦАП
Алгоритм работы цифрового вычислительного
устройства представлен на рисунке 23.6.
,
получаемое в ЦВУ в реальном масштабе
времени вводится в непрерывную часть
системы через ЦАП
Алгоритм работы цифрового вычислительного
устройства представлен на рисунке 23.6.
Реализация данного
способа коррекции предполагает
последовательное выполнение операций
квантования по уровню и по времени,
решение разностного уравнения в ЦВУ и
формирование непрерывного сигнала
![]() из дискретного
из дискретного
![]() с помощью экстраполятора нулевого
порядка Второй ИЭ
вводится для того, чтобы учесть дискретный
по времени характер выдачи информации
с помощью экстраполятора нулевого
порядка Второй ИЭ
вводится для того, чтобы учесть дискретный
по времени характер выдачи информации
При условии
![]() в формуле (23.4) значение
в формуле (23.4) значение
![]() определяется предыдущими значениями
входного сигнала
определяется предыдущими значениями
входного сигнала
![]()
Чтобы
сохранить в ЦВУ эти предыдущие значения,
его быстродействие должно быть таким,
чтобы за время, не превышающее Т, выполнить
все необходимые расчеты
При
![]() быстродействие ЦВУ должно обеспечивать
проведение расчетов за время, пренебрежимо
малое в сравнении с интервалом квантования
или же необходимо учитывать запаздывание,
вносимое ЦВУ
быстродействие ЦВУ должно обеспечивать
проведение расчетов за время, пренебрежимо
малое в сравнении с интервалом квантования
или же необходимо учитывать запаздывание,
вносимое ЦВУ

Рис.23.6.
Если число разрядов АЦП достаточно велико, то нелинейностью, вносимой квантованием по уровню, можно пренебречь Тогда получится обычная схема импульсного фильтра, представленная на рис.23.7.
![]()
![]()
![]()
![]()





Рис.23.7.
РАССМОТРИМ ПРИМЕР
Рассмотрим пример синтеза дискретного корректирующего устройства, включаемого последовательно с неизменяемой частью системы Передаточная функция приведенной непрерывной части исходной системы имеет вид:
![]() ,
,
где
![]()
Желаемая ЛАЧХ
(![]() )
системы представлена на рис.23.8.
)
системы представлена на рис.23.8.
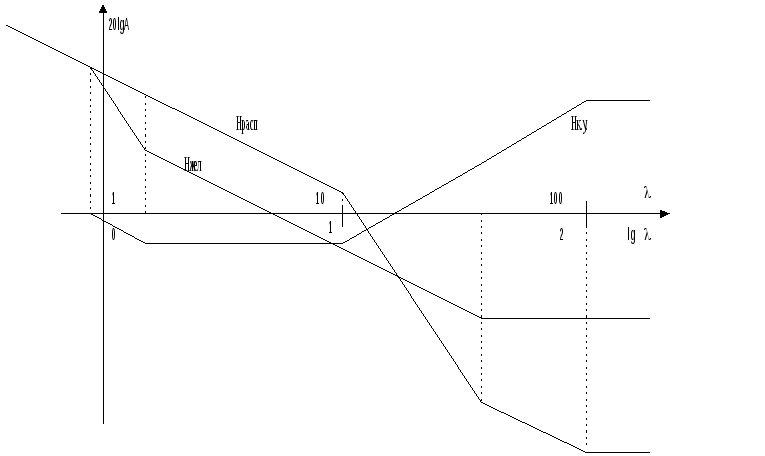
Рис.23.8.
Найдем располагаемую ЛАЧХ импульсной системы, для чего по передаточной функции:
![]()
определим
![]() -
передаточную функцию
-
передаточную функцию
![]()


![]()
Подставляем
![]() ,
получим:
,
получим:
Введем обозначение
:
![]() .
.
Далее вместо
выполним замену:
![]() .
.

в числах:
![]()
Располагаемая ЛАЧХ представлена на рис.7.12.:
Тогда
![]() - передаточная функция коррекционного
устройства имеет вид:
- передаточная функция коррекционного
устройства имеет вид:
![]()
или
![]()
Переходим с помощью билинейного преобразования к переменной Z:

![]()
Получим:
![]() .
.
Рассмотрим пример реализации данного дискретного фильтра ЦВУ.
Схема моделирования фильтра методом прямого программирования:
Запишем ПФ КУ в общем виде:

![]()
Введем в промежуточную
функцию
![]() :
:
![]()
Структурная схема приведена на рис.23.8.:






![]()

![]()
![]()




![]()

![]()





 e(z) x(z)
x1(z)
S y(z)
e(z) x(z)
x1(z)
S y(z)


![]()



![]()



Рис.23.8.
Обозначим переменные:

![]()
![]()